Description
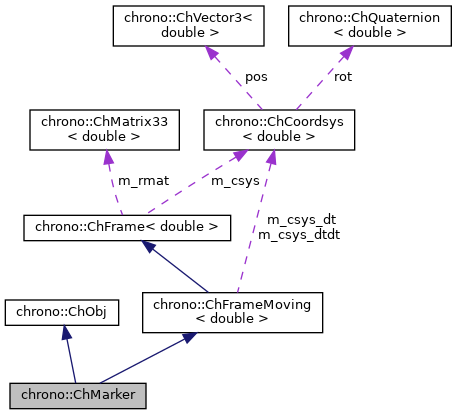
Markers are auxiliary reference frames attached to a rigid body and moving with the body.
Most often, markers are used as references to build ChLink() constraints between two rigid bodies. ChMarker also allows user-defined motion laws of the marker with respect to the parent body, e.g., to represent imposed trajectories.
#include <ChMarker.h>
Public Types | |
| enum | MotionType { MotionType::FUNCTIONS, MotionType::KEYFRAMED, MotionType::EXTERNAL } |
Public Member Functions | |
| ChMarker (const std::string &name, ChBody *body, const ChCoordsys<> &rel_csys, const ChCoordsys<> &rel_csys_dt, const ChCoordsys<> &rel_csys_dtdt) | |
| ChMarker (const ChMarker &other) | |
| virtual ChMarker * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| ChBody * | GetBody () const |
| Gets a pointer to the associated rigid body. | |
| void | SetBody (ChBody *body) |
| Sets the parent rigid body. | |
| void | ImposeRelativeTransform (const ChFrame<> &frame) |
| Set body-relative marker frame and update auxiliary variables. More... | |
| void | ImposeAbsoluteTransform (const ChFrame<> &frame) |
| Set absolute coordinate marker frame and update auxiliary variables. More... | |
| const ChCoordsysd & | GetRestCoordsys () const |
| Get the 'resting position'. More... | |
| const ChFrameMoving< double > & | GetAbsFrame () const |
| Get reference to the inner 'absolute frame' auxiliary coordinates. More... | |
| const ChCoordsysd & | GetAbsCoordsys () const |
| Get the translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates. | |
| const ChCoordsysd & | GetAbsCoordsysDt () const |
| Get the speed of translation and rotation (as a derived ChCoordsysd) with respect to the absolute coordinates. | |
| const ChCoordsysd & | GetAbsCoordsysDt2 () const |
| Get the acceleration of translation and rotation (as a derived ChCoordsysd) with respect to the absolute coordinates. | |
| void | SetAbsCoordsys (const ChCoordsysd &csys) |
| Set the translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates. More... | |
| void | SetAbsCoordsysDt (const ChCoordsysd &csys_dt) |
| Set the speed of translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates. More... | |
| void | SetAbsCoordsysDt2 (const ChCoordsysd &csys_dtdt) |
| Set the speed of translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates. More... | |
| ChVector3d | GetAbsAngVel () const |
| Get the angular velocity with respect to global frame, expressed in absolute coordinates. | |
| ChVector3d | GetAbsAngAcc () const |
| Get the angular acceleration with respect to global frame, expressed in absolute coordinates. | |
| void | SetMotionType (MotionType motion_type) |
| Set the imposed motion type (default: MotionType::FUNCTIONS). | |
| void | SetMotionX (std::shared_ptr< ChFunction > funct) |
| Set the imposed motion law, for translation on X body axis. | |
| void | SetMotionY (std::shared_ptr< ChFunction > funct) |
| Set the imposed motion law, for translation on Y body axis. | |
| void | SetMotionZ (std::shared_ptr< ChFunction > funct) |
| Set the imposed motion law, for translation on Z body axis. | |
| void | SetMotionAngle (std::shared_ptr< ChFunction > funct) |
| Set the imposed motion law, for rotation about an axis. | |
| void | SetMotionAxis (ChVector3d axis) |
| Set the axis of rotation, if rotation motion law is used. | |
| MotionType | GetMotionType () const |
| Get the imposed motion type. | |
| std::shared_ptr< ChFunction > | GetMotionX () const |
| Get imposed motion law, for translation on X body axis. | |
| std::shared_ptr< ChFunction > | GetMotionY () const |
| Get imposed motion law, for translation on Y body axis. | |
| std::shared_ptr< ChFunction > | GetMotionZ () const |
| Get imposed motion law, for translation on Z body axis. | |
| std::shared_ptr< ChFunction > | GetMotionAngle () const |
| Get imposed motion law, for rotation about an axis. | |
| ChVector3d | GetMotionAxis () const |
| Get the axis of rotation, if rotation motion law is used. | |
| void | UpdateTime (double time) |
| Update time-dependent quantities (time-varying functions for relative coordinates, if any). | |
| void | UpdateState () |
| Update auxiliary variables (e.g., the m_abs_frame data) at current state. | |
| virtual void | Update (double time, UpdateFlags update_flags) override |
| Update the time-dependent variables (e.g., function objects to impose the body-relative motion) and then update the marker state. | |
| void | UpdatedExternalTime (double prevtime, double mtime) |
| Update time from external signal. | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. | |
 Public Member Functions inherited from chrono::ChObj Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this object. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a camera to this object. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this object. | |
| void | UpdateVisualModel () |
| Utility function to update only the associated visual assets (if any). | |
| virtual std::string & | ArchiveContainerName () |
| Public Member Functions inherited from chrono::ChFrameMoving< double > | |
| ChFrameMoving () | |
| Default constructor (identity frame). | |
| ChFrameMoving (const ChVector3< double > &v, const ChQuaternion< double > &q=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from pos and rot (as a quaternion). | |
| ChFrameMoving (const ChVector3< double > &v, const ChMatrix33< double > &R) | |
| Construct from pos and rotation (as a 3x3 matrix). | |
| ChFrameMoving (const ChCoordsys< double > &C) | |
| Construct from a coordsys. | |
| ChFrameMoving (const ChFrame< double > &F) | |
| Construct from a frame. | |
| ChFrameMoving (const ChFrameMoving< double > &other) | |
| Copy constructor, build from another moving frame. | |
| virtual | ~ChFrameMoving () |
| Destructor. | |
| ChFrameMoving< double > & | operator= (const ChFrameMoving< double > &other) |
| Assignment operator: copy from another moving frame. | |
| ChFrameMoving< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrameMoving< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrameMoving< double > &other) const |
| Returns true for different frames. | |
| ChFrameMoving< double > | operator>> (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > | operator* (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChFrameMoving< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrameMoving< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. | |
| ChFrameMoving< double > & | operator*= (const ChFrameMoving< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsysDt () const |
| Return both rotation and translation velocities as a ChCoordsys object. | |
| const ChCoordsys< double > & | GetCoordsysDt2 () const |
| Return both rotation and translation accelerations as a ChCoordsys object. | |
| const ChVector3< double > & | GetPosDt () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetLinVel () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetPosDt2 () const |
| Return the linear acceleration. | |
| const ChVector3< double > & | GetLinAcc () const |
| Return the linear acceleration. | |
| const ChQuaternion< double > & | GetRotDt () const |
| Return the rotation velocity as a quaternion. | |
| const ChQuaternion< double > & | GetRotDt2 () const |
| Return the rotation acceleration as a quaternion. | |
| ChVector3< double > | GetAngVelLocal () const |
| Compute the angular velocity (expressed in local coords). | |
| ChVector3< double > | GetAngVelParent () const |
| Compute the actual angular velocity (expressed in parent coords). | |
| ChVector3< double > | GetAngAccLocal () const |
| Compute the actual angular acceleration (expressed in local coords). | |
| ChVector3< double > | GetAngAccParent () const |
| Compute the actual angular acceleration (expressed in parent coords). | |
| virtual void | SetCoordsysDt (const ChCoordsys< double > &csys_dt) |
| Set both linear and rotation velocities as a single ChCoordsys derivative. | |
| virtual void | SetPosDt (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetLinVel (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetRotDt (const ChQuaternion< double > &q_dt) |
| Set the rotation velocity as a quaternion derivative. More... | |
| virtual void | SetAngVelLocal (const ChVector3< double > &w) |
| Set the rotation velocity from the given angular velocity (expressed in local coordinates). | |
| virtual void | SetAngVelParent (const ChVector3< double > &w) |
| Set the rotation velocity from given angular velocity (expressed in parent coordinates). | |
| virtual void | SetCoordsysDt2 (const ChCoordsys< double > &csys_dtdt) |
| Set the linear and rotation accelerations as a single ChCoordsys derivative. | |
| virtual void | SetPosDt2 (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetLinAcc (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetRotDt2 (const ChQuaternion< double > &q_dtdt) |
| Set the rotation acceleration as a quaternion derivative. More... | |
| virtual void | SetAngAccLocal (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in local coordinates). More... | |
| virtual void | SetAngAccParent (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in parent coordinates). | |
| void | ComputeRotMatDt (ChMatrix33< double > &R_dt) const |
| Compute the time derivative of the rotation matrix. | |
| void | ComputeRotMatDt2 (ChMatrix33< double > &R_dtdt) |
| Compute the second time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt () |
| Return the time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt2 () |
| Return the second time derivative of the rotation matrix. | |
| void | ConcatenatePreTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos) const |
| Return the velocity in the parent frame of a point fixed to this frame and expressed in local coordinates. | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed) const |
| Return the velocity in the parent frame of a moving point, given the point location and velocity expressed in local coordinates. | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos) const |
| Return the acceleration in the parent frame of a point fixed to this frame and expressed in local coordinates. More... | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed, const ChVector3< double > &localacc) const |
| Return the acceleration in the parent frame of a moving point, given the point location, velocity, and acceleration expressed in local coordinates. | |
| ChVector3< double > | PointSpeedParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed) const |
| Return the velocity of a point expressed in this frame, given the point location and velocity in the parent frame. | |
| ChVector3< double > | PointAccelerationParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed, const ChVector3< double > &parentacc) const |
| Return the acceleration of a point expressed in this frame, given the point location, velocity, and acceleration in the parent frame. | |
| ChFrameMoving< double > | TransformLocalToParent (const ChFrameMoving< double > &F) const |
| Transform a moving frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrameMoving< double > | TransformParentToLocal (const ChFrameMoving< double > &F) const |
| Transform a moving frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrameMoving< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrameMoving< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| virtual void | Invert () override |
| Invert in place. More... | |
| ChFrameMoving< double > | GetInverse () const |
| Return the inverse transform. | |
| Public Member Functions inherited from chrono::ChFrame< double > | |
| ChFrame () | |
| Default constructor (identity frame). | |
| ChFrame (const ChVector3< double > &v, const ChQuaternion< double > &q=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from position and rotation (as quaternion). | |
| ChFrame (const ChVector3< double > &v, const ChMatrix33< double > &R) | |
| Construct from pos and rotation (as a 3x3 matrix). | |
| ChFrame (const ChVector3< double > &v, const double angle, const ChVector3< double > &u) | |
| Construct from position mv and rotation of angle alpha around unit vector mu. | |
| ChFrame (const ChCoordsys< double > &C) | |
| Construct from a coordsys. | |
| ChFrame (const ChFrame< double > &other) | |
| Copy constructor, build from another frame. | |
| ChFrame< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrame< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrame< double > &other) const |
| Returns true for different frames. | |
| ChFrame< double > | operator* (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator* (const ChVector3< double > &v) const |
| Transform a vector through this frame (express in parent frame). More... | |
| ChFrame< double > | operator>> (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator/ (const ChVector3< double > &v) const |
| Transform a vector through this frame (express from parent frame). More... | |
| ChFrame< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrame< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrame< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrame< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrame< double > & | operator*= (const ChFrame< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsys () const |
| Return both current rotation and translation as a ChCoordsys object. | |
| const ChVector3< double > & | GetPos () const |
| Return the current translation vector. | |
| const ChQuaternion< double > & | GetRot () const |
| Return the current rotation quaternion. | |
| const ChMatrix33< double > & | GetRotMat () const |
| Return the current 3x3 rotation matrix. | |
| ChVector3< double > | GetRotAxis () const |
| Get axis of finite rotation, in parent space. | |
| double | GetRotAngle () const |
| Get angle of rotation about axis of finite rotation. | |
| virtual void | SetCoordsys (const ChCoordsys< double > &C) |
| Impose both translation and rotation as a single ChCoordsys. More... | |
| virtual void | SetCoordsys (const ChVector3< double > &v, const ChQuaternion< double > &q) |
| Impose both translation and rotation. More... | |
| virtual void | SetRot (const ChQuaternion< double > &q) |
| Impose the rotation as a quaternion. More... | |
| virtual void | SetRot (const ChMatrix33< double > &R) |
| Impose the rotation as a 3x3 matrix. More... | |
| virtual void | SetPos (const ChVector3< double > &pos) |
| Impose the translation vector. | |
| void | ConcatenatePreTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| void | Move (const ChVector3< double > &v) |
| An easy way to move the frame by the amount specified by vector v, (assuming v expressed in parent coordinates) | |
| void | Move (const ChCoordsys< double > &C) |
| Apply both translation and rotation, assuming both expressed in parent coordinates, as a vector for translation and quaternion for rotation,. | |
| ChVector3< double > | TransformPointLocalToParent (const ChVector3< double > &v) const |
| Transform a point from the local frame coordinate system to the parent coordinate system. | |
| ChVector3< double > | TransformPointParentToLocal (const ChVector3< double > &v) const |
| Transforms a point from the parent coordinate system to local frame coordinate system. | |
| ChVector3< double > | TransformDirectionLocalToParent (const ChVector3< double > &d) const |
| Transform a direction from the parent frame coordinate system to 'this' local coordinate system. | |
| ChVector3< double > | TransformDirectionParentToLocal (const ChVector3< double > &d) const |
| Transforms a direction from 'this' local coordinate system to parent frame coordinate system. | |
| ChWrench< double > | TransformWrenchLocalToParent (const ChWrench< double > &w) const |
| Transform a wrench from the local coordinate system to the parent coordinate system. | |
| ChWrench< double > | TransformWrenchParentToLocal (const ChWrench< double > &w) const |
| Transform a wrench from the parent coordinate system to the local coordinate system. | |
| ChFrame< double > | TransformLocalToParent (const ChFrame< double > &F) const |
| Transform a frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrame< double > | TransformParentToLocal (const ChFrame< double > &F) const |
| Transform a frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrame< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrame< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| void | Normalize () |
| Normalize the rotation, so that quaternion has unit length. | |
| virtual void | SetIdentity () |
| Sets to no translation and no rotation. | |
| ChFrame< double > | GetInverse () const |
| Return the inverse transform. | |
Additional Inherited Members | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
| Protected Attributes inherited from chrono::ChFrameMoving< double > | |
| ChCoordsys< double > | m_csys_dt |
| rotation and position velocity, as vector + quaternion | |
| ChCoordsys< double > | m_csys_dtdt |
| rotation and position acceleration, as vector + quaternion | |
| Protected Attributes inherited from chrono::ChFrame< double > | |
| ChCoordsys< double > | m_csys |
| position and rotation, as vector + quaternion | |
| ChMatrix33< double > | m_rmat |
| 3x3 orthogonal rotation matrix | |
Member Enumeration Documentation
◆ MotionType
|
strong |
Member Function Documentation
◆ GetAbsFrame()
|
inline |
Get reference to the inner 'absolute frame' auxiliary coordinates.
This object (coordinates/speeds/accel. of marker expressed in absolute coordinates) is useful for performance reasons. Note! it is updated only after each Update() function.
◆ GetRestCoordsys()
|
inline |
Get the 'resting position'.
This is the position which the marker should have when the x,y,z motion laws are at time=0.
◆ ImposeAbsoluteTransform()
| void chrono::ChMarker::ImposeAbsoluteTransform | ( | const ChFrame<> & | frame | ) |
Set absolute coordinate marker frame and update auxiliary variables.
The current position becomes the 'resting position' coordinates for the current time.
◆ ImposeRelativeTransform()
| void chrono::ChMarker::ImposeRelativeTransform | ( | const ChFrame<> & | frame | ) |
Set body-relative marker frame and update auxiliary variables.
The current position becomes the 'resting position' coordinates for the current time.
◆ SetAbsCoordsys()
|
inline |
Set the translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates.
NOTE! internal use only, for the moment. Use ImposeAbsoluteTransform() if needed.
◆ SetAbsCoordsysDt()
|
inline |
Set the speed of translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates.
NOTE! internal use only, for the moment.
◆ SetAbsCoordsysDt2()
|
inline |
Set the speed of translation and rotation (as a ChCoordsysd) with respect to the absolute coordinates.
NOTE! internal use only, for the moment.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChMarker.h
- /builds/uwsbel/chrono/src/chrono/physics/ChMarker.cpp
