Description
General purpose section of an Euler-Bernoulli beam in 3D.
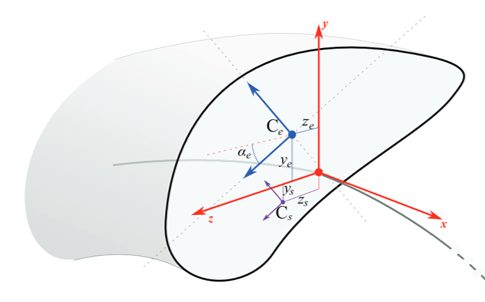
This version does not assume homogeneous density or homogeneous elasticity. This is the case where an FEA preprocessor is used to compute the rigidity of a complex beam made with multi-layered reinforcements with different elasticity and different density - in such a case, ChBeamSectionEulerAdvanced cannot be used because there is no single E or single density, but rather collective values of bending rigidities, and collective mass per unit length. The center of mass of the section can have an offset respect to the centerline. This class allows using these values directly, bypassing any knowledge of area, density, moments of inertia, Young modulus, etc. This material can be shared between multiple beams.
#include <ChBeamSectionEuler.h>
Public Member Functions | |
| ChBeamSectionEulerAdvancedGeneric (const double mAx, const double mTxx, const double mByy, const double mBzz, const double malpha, const double mCy, const double mCz, const double mSy, const double mSz, const double mmu, const double mJxx, const double mMy=0, const double mMz=0) | |
| virtual void | SetAxialRigidity (const double mv) |
| Sets the axial rigidity, usually A*E for uniform elasticity, but for nonuniform elasticity. | |
| virtual void | SetTorsionRigidityX (const double mv) |
| Sets the torsion rigidity, for torsion about X axis, at elastic center, usually J*G for uniform elasticity, but for nonuniform elasticity. | |
| virtual void | SetBendingRigidityY (const double mv) |
| Sets the bending rigidity, for bending about Y axis, at elastic center, usually Iyy*E for uniform elasticity, but for nonuniform elasticity. | |
| virtual void | SetBendingRigidityZ (const double mv) |
| Sets the bending rigidity, for bending about Z axis, at elastic center, usually Izz*E for uniform elasticity, but for nonuniform elasticity. | |
| virtual void | SetSectionRotation (const double mv) |
| Set the rotation in [rad], about elastic center, of the Y Z axes for which the YbendingRigidity and ZbendingRigidity values are defined. | |
| virtual void | SetCentroidY (const double mv) |
| Sets the Y position of the elastic center respect to centerline. | |
| virtual void | SetCentroidZ (const double mv) |
| Sets the Z position of the elastic center respect to centerline. | |
| virtual void | SetShearCenterY (const double mv) |
| Sets the Y position of the shear center respect to centerline. | |
| virtual void | SetShearCenterZ (const double mv) |
| Sets the Z position of the shear center respect to centerline. | |
| virtual void | SetMassPerUnitLength (const double mv) |
| Set mass per unit length. More... | |
| virtual void | SetInertiaJxxPerUnitLength (const double mv) |
| Set the Jxx component of the inertia per unit length (polar inertia), computed at centerline. More... | |
| virtual void | SetInertiaJxxPerUnitLengthInMassReference (const double mv) |
| Set inertia moment per unit length Jxx_massref. More... | |
| virtual double | GetInertiaJxxPerUnitLengthInMassReference () |
| Get inertia moment per unit length Jxx_massref, as assumed computed in the "mass reference" frame, ie. centered at the center of mass. | |
| void | SetCenterOfMass (double my, double mz) |
| Set the displacement of the center of mass with respect to the section centerline reference. | |
| double | GetCenterOfMassY () |
| double | GetCenterOfMassZ () |
| virtual double | GetAxialRigidity () const override |
| Gets the axial rigidity, usually A*E. | |
| virtual double | GetTorsionRigidityX () const override |
| Gets the torsion rigidity, for torsion about X axis at elastic center, usually J*G. | |
| virtual double | GetBendingRigidityY () const override |
| Gets the bending rigidity, for bending about Y axis at elastic center, usually Iyy*E. | |
| virtual double | GetBendingRigidityZ () const override |
| Gets the bending rigidity, for bending about Z axis at elastic center, usually Izz*E. | |
| virtual double | GetSectionRotation () const override |
| Set the rotation of the Y Z section axes for which the YbendingRigidity and ZbendingRigidity are defined. | |
| virtual double | GetCentroidY () const override |
| Gets the Y position of the elastic center respect to centerline. | |
| virtual double | GetCentroidZ () const override |
| Gets the Z position of the elastic center respect to centerline. | |
| virtual double | GetShearCenterY () const override |
| Gets the Y position of the shear center respect to centerline. | |
| virtual double | GetShearCenterZ () const override |
| Gets the Z position of the shear center respect to centerline. | |
| virtual void | ComputeInertiaMatrix (ChMatrix66d &M) override |
| Compute the 6x6 sectional inertia matrix, as in {x_momentum,w_momentum}=[Mm]{xvel,wvel}. | |
| virtual void | ComputeInertiaDampingMatrix (ChMatrix66d &Ri, const ChVector3d &mW) override |
| Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping) More... | |
| virtual void | ComputeInertiaStiffnessMatrix (ChMatrix66d &Ki, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) override |
| Compute the 6x6 sectional inertia stiffness matrix [Ki^]. More... | |
| virtual void | ComputeQuadraticTerms (ChVector3d &mF, ChVector3d &mT, const ChVector3d &mW) override |
| Compute the centrifugal term and gyroscopic term. | |
| virtual double | GetMassPerUnitLength () const override |
| Get mass per unit length. | |
| virtual double | GetInertiaJxxPerUnitLength () const override |
| Get the Jxx component of the inertia per unit length (polar inertia), at centerline. | |
 Public Member Functions inherited from chrono::fea::ChBeamSectionEuler Public Member Functions inherited from chrono::fea::ChBeamSectionEuler | |
| ChBeamSectionEuler () | |
| Construct an Euler beam section with default properties. | |
| virtual void | ComputeInertialForce (ChVector3d &mFi, ChVector3d &mTi, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) |
| Compute the total inertial forces (per unit length). More... | |
| void | SetArtificialJyyJzzFactor (double mf) |
| The Euler beam model has no rotational inertia per each section, assuming mass is concentrated on the centerline. More... | |
| double | GetArtificialJyyJzzFactor () |
| virtual void | SetRayleighDampingAlpha (double malpha) |
| Set the "alpha" Rayleigh damping ratio, the mass-proportional structural damping in: R = alpha*M + beta*K. | |
| double | GetRayleighDampingAlpha () |
| virtual void | SetRayleighDampingBeta (double mbeta) |
| Set the "beta" Rayleigh damping ratio, the stiffness-proportional structural damping in: R = alpha*M + beta*K. | |
| double | GetRayleighDampingBeta () |
| virtual void | SetRayleighDamping (double mbeta, double malpha=0) |
| Set both beta and alpha coefficients in Rayleigh damping model: R = alpha*M + beta*K. More... | |
| Public Member Functions inherited from chrono::fea::ChBeamSection | |
| void | SetDrawShape (std::shared_ptr< ChBeamSectionShape > mshape) |
| Set the graphical representation for this section. More... | |
| std::shared_ptr< ChBeamSectionShape > | GetDrawShape () const |
| Get the drawing shape of this section (i.e.a 2D profile used for drawing 3D tessellation and visualization) By default a thin square section, use SetDrawShape() to change it. | |
| void | SetDrawThickness (double thickness_y, double thickness_z) |
| Shortcut: adds a ChBeamSectionShapeRectangular for visualization as a centered rectangular beam, and sets its width/height. More... | |
| void | SetDrawCircularRadius (double draw_rad) |
| Shortcut: adds a ChBeamSectionShapeCircular for visualization as a centered circular beam, and sets its radius. More... | |
| void | SetCircular (bool ic) |
| OBSOLETE only for backward compatibility. | |
Protected Attributes | |
| double | Ax |
| double | Txx |
| double | Byy |
| double | Bzz |
| double | alpha |
| double | Cy |
| double | Cz |
| double | Sy |
| double | Sz |
| double | mu |
| double | Jxx |
| double | My |
| double | Mz |
| Protected Attributes inherited from chrono::fea::ChBeamSectionEuler | |
| double | rdamping_beta |
| double | rdamping_alpha |
| double | JzzJyy_factor |
Additional Inherited Members | |
| Public Attributes inherited from chrono::fea::ChBeamSectionEuler | |
| bool | compute_inertia_damping_matrix = true |
| Flag that turns on/off the computation of the [Ri] 'gyroscopic' inertial damping matrix. More... | |
| bool | compute_inertia_stiffness_matrix = true |
| Flag that turns on/off the computation of the [Ki] inertial stiffness matrix. More... | |
| bool | compute_Ri_Ki_by_num_diff = false |
| Flag for computing the Ri and Ki matrices via numerical differentiation even if an analytical expression is provided. More... | |
Constructor & Destructor Documentation
◆ ChBeamSectionEulerAdvancedGeneric()
|
inline |
- Parameters
-
mAx axial rigidity mTxx torsion rigidity mByy bending rigidity about yy mBzz bending rigidity about zz malpha section rotation about elastic center [rad] mCy elastic center y displacement respect to centerline mCz elastic center z displacement respect to centerline mSy shear center y displacement respect to centerline mSz shear center z displacement respect to centerline mmu mass per unit length mJxx polar inertia Jxx per unit length, measured respect to centerline mMy mass center y displacement respect to centerline mMz mass center z displacement respect to centerline
Member Function Documentation
◆ ComputeInertiaDampingMatrix()
|
overridevirtual |
Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping)
- Parameters
-
Ri 6x6 sectional inertial-damping (gyroscopic damping) matrix values here mW current angular velocity of section, in material frame
Reimplemented from chrono::fea::ChBeamSectionEuler.
Reimplemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric.
◆ ComputeInertiaStiffnessMatrix()
|
overridevirtual |
Compute the 6x6 sectional inertia stiffness matrix [Ki^].
- Parameters
-
Ki 6x6 sectional inertial-stiffness matrix [Ki^] values here mWvel current angular velocity of section, in material frame mWacc current angular acceleration of section, in material frame mXacc current acceleration of section, in material frame (not absolute!)
Reimplemented from chrono::fea::ChBeamSectionEuler.
Reimplemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric.
◆ SetInertiaJxxPerUnitLength()
|
inlinevirtual |
Set the Jxx component of the inertia per unit length (polar inertia), computed at centerline.
For uniform density it would be Ixx*density or, by polar theorem, (Izz+Iyy)*density, but for nonuniform density here you can put a value ad-hoc from a preprocessor
◆ SetInertiaJxxPerUnitLengthInMassReference()
|
inlinevirtual |
Set inertia moment per unit length Jxx_massref.
This is assumed to be computed in the "mass reference" frame, ie. centered at the center of mass. Call this after you set SetCenterOfMass() and SetMassPerUnitLength()
◆ SetMassPerUnitLength()
|
inlinevirtual |
Set mass per unit length.
For uniform density it would be A*density, but for nonuniform density.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionEuler.h
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionEuler.cpp
