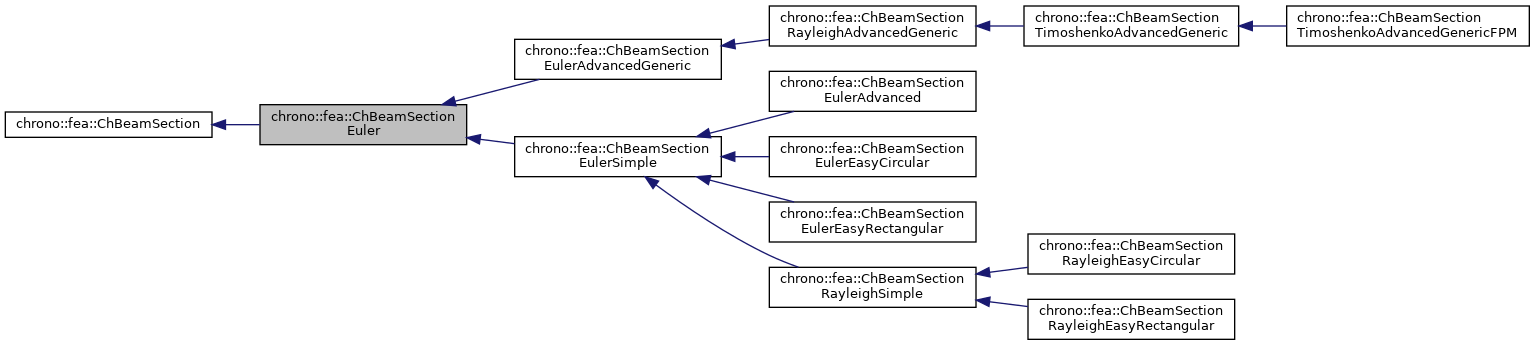
Description
Base class for all constitutive models of sections of Euler beams.
#include <ChBeamSectionEuler.h>
Public Member Functions | |
| ChBeamSectionEuler () | |
| Construct an Euler beam section with default properties. | |
| virtual double | GetAxialRigidity () const =0 |
| Gets the axial rigidity, usually A*E. | |
| virtual double | GetTorsionRigidityX () const =0 |
| Gets the torsion rigidity, for torsion about X axis at elastic center, usually J*G. | |
| virtual double | GetBendingRigidityY () const =0 |
| Gets the bending rigidity, for bending about Y axis at elastic center, usually Iyy*E. | |
| virtual double | GetBendingRigidityZ () const =0 |
| Gets the bending rigidity, for bending about Z axis at elastic center, usually Izz*E. | |
| virtual double | GetSectionRotation () const =0 |
| Set the rotation of the Y Z section axes for which the YbendingRigidity and ZbendingRigidity are defined. | |
| virtual double | GetCentroidY () const =0 |
| Gets the Y position of the elastic center respect to centerline. | |
| virtual double | GetCentroidZ () const =0 |
| Gets the Z position of the elastic center respect to centerline. | |
| virtual double | GetShearCenterY () const =0 |
| Gets the Y position of the shear center respect to centerline. | |
| virtual double | GetShearCenterZ () const =0 |
| Gets the Z position of the shear center respect to centerline. | |
| virtual double | GetMassPerUnitLength () const =0 |
| Get mass per unit length. | |
| virtual double | GetInertiaJxxPerUnitLength () const =0 |
| Get the Jxx component of the inertia per unit length (polar inertia) in the Y Z non-rotated reference frame of the section at centerline. More... | |
| virtual void | ComputeInertiaMatrix (ChMatrix66d &M)=0 |
| Compute the 6x6 sectional inertia matrix, as in {x_momentum,w_momentum}=[Mm]{xvel,wvel} The matrix is computed in the material reference (i.e. More... | |
| virtual void | ComputeInertiaDampingMatrix (ChMatrix66d &Ri, const ChVector3d &mW) |
| Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping), as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference, i.e. More... | |
| virtual void | ComputeInertiaStiffnessMatrix (ChMatrix66d &Ki, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) |
| Compute the 6x6 sectional inertia stiffness matrix [Ki^], as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference. More... | |
| virtual void | ComputeQuadraticTerms (ChVector3d &mF, ChVector3d &mT, const ChVector3d &mW)=0 |
| Compute the values of inertial force & torque depending on quadratic velocity terms, that is the gyroscopic torque (null for Euler beam as point-like mass section, might be nonzero if adding Rayleigh beam theory) and the centrifugal term (if any). More... | |
| virtual void | ComputeInertialForce (ChVector3d &mFi, ChVector3d &mTi, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) |
| Compute the total inertial forces (per unit length). More... | |
| void | SetArtificialJyyJzzFactor (double mf) |
| The Euler beam model has no rotational inertia per each section, assuming mass is concentrated on the centerline. More... | |
| double | GetArtificialJyyJzzFactor () |
| virtual void | SetRayleighDampingAlpha (double malpha) |
| Set the "alpha" Rayleigh damping ratio, the mass-proportional structural damping in: R = alpha*M + beta*K. | |
| double | GetRayleighDampingAlpha () |
| virtual void | SetRayleighDampingBeta (double mbeta) |
| Set the "beta" Rayleigh damping ratio, the stiffness-proportional structural damping in: R = alpha*M + beta*K. | |
| double | GetRayleighDampingBeta () |
| virtual void | SetRayleighDamping (double mbeta, double malpha=0) |
| Set both beta and alpha coefficients in Rayleigh damping model: R = alpha*M + beta*K. More... | |
 Public Member Functions inherited from chrono::fea::ChBeamSection Public Member Functions inherited from chrono::fea::ChBeamSection | |
| void | SetDrawShape (std::shared_ptr< ChBeamSectionShape > mshape) |
| Set the graphical representation for this section. More... | |
| std::shared_ptr< ChBeamSectionShape > | GetDrawShape () const |
| Get the drawing shape of this section (i.e.a 2D profile used for drawing 3D tessellation and visualization) By default a thin square section, use SetDrawShape() to change it. | |
| void | SetDrawThickness (double thickness_y, double thickness_z) |
| Shortcut: adds a ChBeamSectionShapeRectangular for visualization as a centered rectangular beam, and sets its width/height. More... | |
| void | SetDrawCircularRadius (double draw_rad) |
| Shortcut: adds a ChBeamSectionShapeCircular for visualization as a centered circular beam, and sets its radius. More... | |
| void | SetCircular (bool ic) |
| OBSOLETE only for backward compatibility. | |
Public Attributes | |
| bool | compute_inertia_damping_matrix = true |
| Flag that turns on/off the computation of the [Ri] 'gyroscopic' inertial damping matrix. More... | |
| bool | compute_inertia_stiffness_matrix = true |
| Flag that turns on/off the computation of the [Ki] inertial stiffness matrix. More... | |
| bool | compute_Ri_Ki_by_num_diff = false |
| Flag for computing the Ri and Ki matrices via numerical differentiation even if an analytical expression is provided. More... | |
Protected Attributes | |
| double | rdamping_beta |
| double | rdamping_alpha |
| double | JzzJyy_factor |
Member Function Documentation
◆ ComputeInertiaDampingMatrix()
|
virtual |
Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping), as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference, i.e.
both linear and rotational coords assumed in the basis of the centerline reference. Default implementation: falls back to numerical differentiation of ComputeInertialForce to compute Ri, please override this if analytical formula of Ri is known!
- Parameters
-
Ri 6x6 sectional inertial-damping (gyroscopic damping) matrix values here mW current angular velocity of section, in material frame
Reimplemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric, chrono::fea::ChBeamSectionRayleighSimple, chrono::fea::ChBeamSectionEulerAdvancedGeneric, and chrono::fea::ChBeamSectionEulerSimple.
◆ ComputeInertialForce()
|
virtual |
Compute the total inertial forces (per unit length).
This default implementation falls back to Fi = [Mi]*{xacc,wacc}+{mF,mT} where [Mi] is given by ComputeInertiaMatrix() and {F_quad,T_quad} are given by ComputeQuadraticTerms(), i.e. gyro and centrif.terms. Note: both force and torque are returned in the basis of the material frame (not the absolute frame!), ex. to apply it to a Chrono body, the force must be rotated to absolute basis. For faster implementations one can override this, ex. avoid doing the [Mi] matrix product.
- Parameters
-
mFi total inertial force returned here, in basis of material frame mTi total inertial torque returned here, in basis of material frame mWvel current angular velocity of section, in material frame mWacc current angular acceleration of section, in material frame mXacc current acceleration of section, in material frame (not absolute!)
◆ ComputeInertiaMatrix()
|
pure virtual |
Compute the 6x6 sectional inertia matrix, as in {x_momentum,w_momentum}=[Mm]{xvel,wvel} The matrix is computed in the material reference (i.e.
it is the sectional mass matrix)
- Parameters
-
M 6x6 sectional mass matrix values here
Implemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric, chrono::fea::ChBeamSectionRayleighSimple, chrono::fea::ChBeamSectionEulerAdvancedGeneric, and chrono::fea::ChBeamSectionEulerSimple.
◆ ComputeInertiaStiffnessMatrix()
|
virtual |
Compute the 6x6 sectional inertia stiffness matrix [Ki^], as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference.
NOTE the matrix already contains the 'geometric' stiffness, so it transforms to absolute transl/local rot just like [Mi] and [Ri]: [Ki]_al =[R,0;0,I]*[Ki^]*[R',0;0,I'] , with [Ki^]=([Ki]+[0,f~';0,0]) for f=current force part of inertial forces. Default implementation: falls back to numerical differentiation of ComputeInertialForce to compute Ki^, please override this if analytical formula of Ki^ is known!
- Parameters
-
Ki 6x6 sectional inertial-stiffness matrix [Ki^] values here mWvel current angular velocity of section, in material frame mWacc current angular acceleration of section, in material frame mXacc current acceleration of section, in material frame (not absolute!)
Reimplemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric, chrono::fea::ChBeamSectionRayleighSimple, chrono::fea::ChBeamSectionEulerAdvancedGeneric, and chrono::fea::ChBeamSectionEulerSimple.
◆ ComputeQuadraticTerms()
|
pure virtual |
Compute the values of inertial force & torque depending on quadratic velocity terms, that is the gyroscopic torque (null for Euler beam as point-like mass section, might be nonzero if adding Rayleigh beam theory) and the centrifugal term (if any).
All terms expressed in the material reference, ie. the reference in the centerline of the section.
- Parameters
-
mF centrifugal term (if any) returned here mT gyroscopic term returned here mW current angular velocity of section, in material frame
Implemented in chrono::fea::ChBeamSectionRayleighAdvancedGeneric, chrono::fea::ChBeamSectionRayleighSimple, chrono::fea::ChBeamSectionEulerAdvancedGeneric, and chrono::fea::ChBeamSectionEulerSimple.
◆ GetInertiaJxxPerUnitLength()
|
pure virtual |
Get the Jxx component of the inertia per unit length (polar inertia) in the Y Z non-rotated reference frame of the section at centerline.
Note: it automatically follows Jxx=Jyy+Jzz for the polar theorem. Also, Jxx=density*Ixx if constant density.
Implemented in chrono::fea::ChBeamSectionEulerAdvancedGeneric, and chrono::fea::ChBeamSectionEulerSimple.
◆ SetArtificialJyyJzzFactor()
|
inline |
The Euler beam model has no rotational inertia per each section, assuming mass is concentrated on the centerline.
However this creates a singular mass matrix, that might end in problems when doing modal analysis etc. A solution is to force Jyy and Jzz inertias per unit lengths to be a percent of the mass per unit length. By default it is 1/500. Use this function to set such factor. You can also turn it to zero. Note that the effect becomes negligible anyway for finer meshing.
◆ SetRayleighDamping()
|
inlinevirtual |
Set both beta and alpha coefficients in Rayleigh damping model: R = alpha*M + beta*K.
For backward compatibility, if one provides only the first parameter, this would be the "beta" stiffness-proportional term, and the "alpha" mass proportional term would be left to default zero.
Member Data Documentation
◆ compute_inertia_damping_matrix
| bool chrono::fea::ChBeamSectionEuler::compute_inertia_damping_matrix = true |
Flag that turns on/off the computation of the [Ri] 'gyroscopic' inertial damping matrix.
If false, Ri=0. Can be used for cpu speedup, profiling, tests. Default: true.
◆ compute_inertia_stiffness_matrix
| bool chrono::fea::ChBeamSectionEuler::compute_inertia_stiffness_matrix = true |
Flag that turns on/off the computation of the [Ki] inertial stiffness matrix.
If false, Ki=0. Can be used for cpu speedup, profiling, tests. Default: true.
◆ compute_Ri_Ki_by_num_diff
| bool chrono::fea::ChBeamSectionEuler::compute_Ri_Ki_by_num_diff = false |
Flag for computing the Ri and Ki matrices via numerical differentiation even if an analytical expression is provided.
Children classes must take care of this. Default: false.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionEuler.h
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionEuler.cpp
