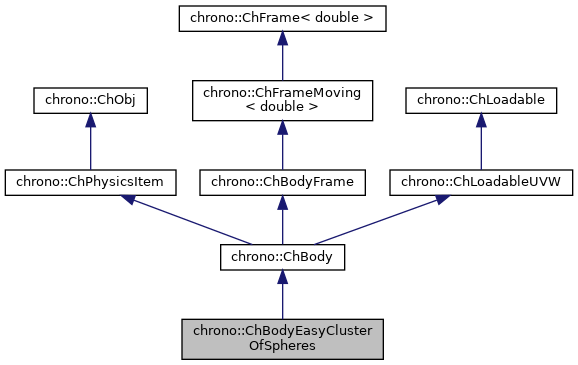
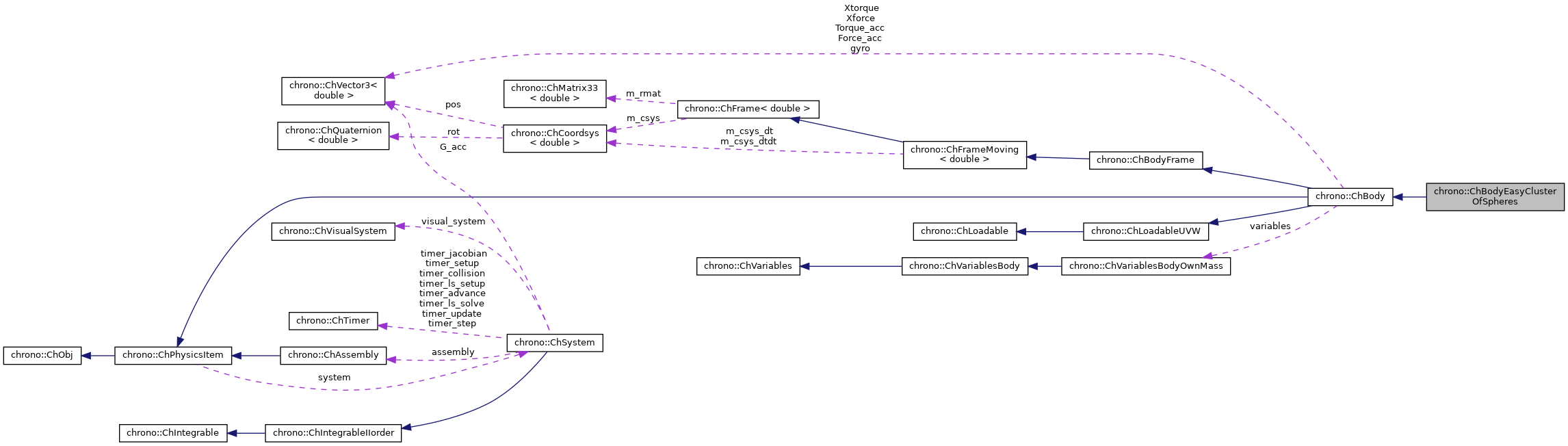
Description
Create rigid bodies with a shape made of a cluster of spheres.
Optionally sets the visualization and/or collision geometry and automatically calculates inertia properties based on the geometry. Note that mass and inertia are computed as if spheres are not intersecting. If a more precise mass/inertia estimation is needed when spheres are intersecting, change mass and inertia after creation using more advanced formulas.
#include <ChBodyEasy.h>
Public Member Functions | |
| ChBodyEasyClusterOfSpheres (const std::vector< ChVector3d > &positions, const std::vector< double > &radii, double density, bool create_visualization=true, bool create_collision=false, std::shared_ptr< ChContactMaterial > material=nullptr) | |
| Create a rigid body with optional sphere cluster mesh visualization and/or collision shapes. More... | |
| ChBodyEasyClusterOfSpheres (const std::vector< ChVector3d > &positions, const std::vector< double > &radii, double density, std::shared_ptr< ChContactMaterial > material) | |
| Create a ChBody with a sphere cluster mesh visualization and collision shapes. More... | |
| virtual void | ArchiveOutConstructor (ChArchiveOut &archive_out) |
| Deserialization for non-default constructor classes. | |
 Public Member Functions inherited from chrono::ChBody Public Member Functions inherited from chrono::ChBody | |
| ChBody (const ChBody &other) | |
| virtual ChBody * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| void | SetFixed (bool state) |
| Sets the 'fixed' state of the body. More... | |
| bool | IsFixed () const |
| Return true if this body is fixed to ground. | |
| void | EnableCollision (bool state) |
| Enable/disable the collision for this rigid body. | |
| virtual bool | IsCollisionEnabled () const override |
| Return true if collision is enabled for this body. | |
| void | SetLimitSpeed (bool state) |
| Enable the maximum linear speed limit (default: false). | |
| void | SetUseGyroTorque (bool state) |
| Enable/disable the gyroscopic torque (quadratic term). More... | |
| bool | IsUsingGyroTorque () const |
| Return true if gyroscopic torque is used (default=true). | |
| void | SetSleepingAllowed (bool state) |
| Enable/disable option for setting bodies to 'sleep'. More... | |
| bool | IsSleepingAllowed () const |
| Return true if 'sleep' mode is allowed for this specific body. | |
| void | SetSleeping (bool state) |
| Force the body in sleeping mode or not. More... | |
| bool | IsSleeping () const |
| Return true if this body is currently in 'sleep' mode. | |
| bool | TrySleeping () |
| Test if a body could go in sleeping state if requirements are satisfied. More... | |
| virtual bool | IsActive () const override |
| Return true if the body is currently active and therefore included into the system solver. More... | |
| unsigned int | GetIndex () |
| Get the unique sequential body index (internal use only). | |
| virtual unsigned int | GetNumCoordsPosLevel () override |
| Number of coordinates of body: 7 because uses quaternions for rotation. | |
| virtual unsigned int | GetNumCoordsVelLevel () override |
| Number of coordinates of body: 6 because derivatives use angular velocity. | |
| virtual ChVariables & | Variables () override |
| Return a reference to the encapsulated ChVariablesBody, representing states (pos, speed, or accel.) and forces. More... | |
| void | ForceToRest () override |
| Set no speed and no accelerations (but does not change the position). | |
| virtual void | AddCollisionModelsToSystem (ChCollisionSystem *coll_sys) const override |
| Add the body collision model (if any) to the provided collision system. | |
| virtual void | RemoveCollisionModelsFromSystem (ChCollisionSystem *coll_sys) const override |
| Remove the body collision model (if any) from the provided collision system. | |
| virtual void | SyncCollisionModels () override |
| Synchronize the position and bounding box of the body collision model (if any). | |
| virtual const ChFrameMoving & | GetFrameCOMToAbs () const |
| Get the rigid body coordinate system that represents the GOG (Center of Gravity). More... | |
| virtual const ChFrameMoving & | GetFrameRefToAbs () const |
| Get the rigid body coordinate system that is used for defining the collision shapes and the ChMarker objects. More... | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const override |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| virtual ChAABB | GetTotalAABB () const override |
| Get the axis-aligned bounding (AABB) box of the object. More... | |
| void | AddMarker (std::shared_ptr< ChMarker > amarker) |
| Attach a marker to this body. | |
| void | AddForce (std::shared_ptr< ChForce > aforce) |
| Attach a force to this body. | |
| void | RemoveMarker (std::shared_ptr< ChMarker > amarker) |
| Remove a specific marker from this body. More... | |
| void | RemoveForce (std::shared_ptr< ChForce > aforce) |
| Remove a specific force from this body. More... | |
| void | RemoveAllForces () |
| Remove all markers at once. More... | |
| void | RemoveAllMarkers () |
| Remove all markers at once. More... | |
| std::shared_ptr< ChMarker > | SearchMarker (const std::string &name) const |
| Find a marker by its name. | |
| std::shared_ptr< ChMarker > | SearchMarker (int id) const |
| Find a marker by its identifier. | |
| std::shared_ptr< ChForce > | SearchForce (const std::string &name) const |
| Find a force by its name. | |
| const std::vector< std::shared_ptr< ChMarker > > & | GetMarkers () const |
| Gets the list of children markers. More... | |
| const std::vector< std::shared_ptr< ChForce > > & | GetForces () const |
| Gets the list of children forces. More... | |
| void | SetMass (double newmass) |
| Set the body mass. More... | |
| double | GetMass () |
| Get the body mass. | |
| void | SetInertia (const ChMatrix33<> &newXInertia) |
| Set the inertia tensor of the body. More... | |
| const ChMatrix33 & | GetInertia () const |
| Get the inertia tensor, expressed in the local coordinate system. More... | |
| const ChMatrix33 & | GetInvInertia () const |
| Get the inverse of the inertia matrix. | |
| void | SetInertiaXX (const ChVector3d &iner) |
| Set the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| ChVector3d | GetInertiaXX () const |
| Get the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| void | SetInertiaXY (const ChVector3d &iner) |
| Set the off-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values). More... | |
| ChVector3d | GetInertiaXY () const |
| Get the extra-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values). More... | |
| void | SetMaxLinVel (float m_max_speed) |
| Set the maximum linear speed (beyond this limit it will be clamped). More... | |
| float | GetMaxLinVel () const |
| void | SetMaxAngVel (float m_max_wvel) |
| Set the maximum angular speed (beyond this limit it will be clamped). More... | |
| float | GetMaxAngVel () const |
| void | ClampSpeed () |
| Clamp the body speed to the provided limits. More... | |
| void | SetSleepTime (float m_t) |
| Set the amount of time which must pass before going automatically in sleep mode when the body has very small movements. | |
| float | GetSleepTime () const |
| void | SetSleepMinLinVel (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinLinVel () const |
| void | SetSleepMinAngVel (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinAngVel () const |
| void | ComputeQInertia (ChMatrix44<> &mQInertia) |
| Computes the 4x4 inertia tensor in quaternion space, if needed. | |
| void | ComputeGyro () |
| Computes the gyroscopic torque. More... | |
| unsigned int | AddAccumulator () |
| Add a new force and torque accumulator. More... | |
| void | EmptyAccumulator (unsigned int idx) |
| Clear the accumulator with specified index. | |
| void | AccumulateForce (unsigned int idx, const ChVector3d &force, const ChVector3d &appl_point, bool local) |
| Include a concentrated body force in the specified accumulator. More... | |
| void | AccumulateTorque (unsigned int idx, const ChVector3d &torque, bool local) |
| Include a body torque in the specified accumulator. More... | |
| const ChVector3d & | GetAccumulatedForce (unsigned int idx) const |
| Return the current value of the accumulated force from the specified accumulator. More... | |
| const ChVector3d & | GetAccumulatedTorque (unsigned int idx) const |
| Return the current value of the accumulated torque from the specified accumulator. More... | |
| const ChWrenchd | GetAccumulatorWrench () const |
| void | UpdateMarkers (double time, UpdateFlags update_flags) |
| Update all children markers of the rigid body, at current body state. | |
| void | UpdateForces (double time, UpdateFlags update_flags) |
| Update all children forces of the rigid body, at current body state. | |
| virtual void | Update (double time, UpdateFlags update_flags) override |
| Update all auxiliary data of the rigid body and of its children (markers, forces..), at given time. | |
| ChVector3d | GetAppliedForce () |
| Return the resultant applied force on the body. More... | |
| ChVector3d | GetAppliedTorque () |
| Return the resultant applied torque on the body. More... | |
| ChVector3d | GetContactForce () |
| Get the resultant contact force acting on this body. | |
| ChVector3d | GetContactTorque () |
| Get the resultant contact torque acting on this body. | |
| virtual ChPhysicsItem * | GetPhysicsItem () override |
| This is only for backward compatibility. | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. More... | |
| virtual void | LoadableGetVariables (std::vector< ChVariables * > &mvars) override |
| Get the pointers to the contained ChVariables, appending to the mvars vector. | |
| virtual void | LoadableStateIncrement (const unsigned int off_x, ChState &x_new, const ChState &x, const unsigned int off_v, const ChStateDelta &Dv) override |
| Increment all DOFs using a delta. | |
| virtual void | LoadableGetStateBlockPosLevel (int block_offset, ChState &mD) override |
| Gets all the DOFs packed in a single vector (position part) | |
| virtual void | LoadableGetStateBlockVelLevel (int block_offset, ChStateDelta &mD) override |
| Gets all the DOFs packed in a single vector (speed part) | |
| virtual void | ComputeNF (const double U, const double V, const double W, ChVectorDynamic<> &Qi, double &detJ, const ChVectorDynamic<> &F, ChVectorDynamic<> *state_x, ChVectorDynamic<> *state_w) override |
| Evaluate Q=N'*F, for Q generalized lagrangian load, where N is some type of matrix evaluated at point P(U,V,W) assumed in absolute coordinates, and F is a load assumed in absolute coordinates. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem(). | |
| virtual void | SetSystem (ChSystem *m_system) |
| Set the pointer to the parent ChSystem(). More... | |
| virtual ChVector3d | GetCenter () const |
| Get a symbolic 'center' of the object. More... | |
| virtual void | Setup () |
| Perform setup operations. More... | |
| virtual unsigned int | GetNumConstraints () |
| Get the number of scalar constraints. | |
| virtual unsigned int | GetNumConstraintsBilateral () |
| Get the number of bilateral scalar constraints. | |
| virtual unsigned int | GetNumConstraintsUnilateral () |
| Get the number of unilateral scalar constraints. | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the Lagrange multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the Lagrange multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | IntStateGatherReactions (const unsigned int off_L, ChVectorDynamic<> &L) |
| From item's reaction forces to global reaction vector. More... | |
| virtual void | IntStateScatterReactions (const unsigned int off_L, const ChVectorDynamic<> &L) |
| From global reaction vector to item's reaction forces. More... | |
| virtual void | IntStateOnEndStep (double T) |
| Called at the end of a step, after the state has been updated. More... | |
| virtual void | IntLoadResidual_CqL (const unsigned int off_L, ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) |
| Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L. More... | |
| virtual void | IntLoadConstraint_C (const unsigned int off, ChVectorDynamic<> &Qc, const double c, const double c_vel, bool do_clamp, double recovery_clamp) |
| Takes the term C, scale and adds to Qc at given offset: Qc += c*C. More... | |
| virtual void | IntLoadConstraint_Ct (const unsigned int off, ChVectorDynamic<> &Qc, const double c, const double c_vel) |
| Takes the term Ct, scale and adds to Qc at given offset: Qc += c*Ct. More... | |
| virtual void | InjectConstraints (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChConstraint objects associated with this item. | |
| virtual void | LoadConstraintJacobians () |
| Compute and load current Jacobians in encapsulated ChConstraint objects. | |
| virtual void | InjectKRMMatrices (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChKRMBlock objects associated with this item. | |
| virtual void | LoadKRMMatrices (double Kfactor, double Rfactor, double Mfactor) |
| Compute and load current stiffnes (K), damping (R), and mass (M) matrices in encapsulated ChKRMBlock objects. More... | |
| virtual void | ConstraintsBiReset () |
| Sets to zero the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_C (double factor=1, double recovery_clamp=0.1, bool do_clamp=false) |
| Adds the current C (constraint violation) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Ct (double factor=1) |
| Adds the current Ct (partial t-derivative, as in C_dt=0-> [Cq]*q_dt=-Ct) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| virtual void | ConstraintsFetch_react (double factor=1) |
| Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints. More... | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this object. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a camera to this object. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this object. | |
| void | UpdateVisualModel () |
| Utility function to update only the associated visual assets (if any). | |
| virtual std::string & | ArchiveContainerName () |
| Public Member Functions inherited from chrono::ChBodyFrame | |
| ChBodyFrame (const ChBodyFrame &other) | |
| ChWrenchd | AppliedForceLocalToWrenchParent (const ChVector3d &force, const ChVector3d &appl_point) |
| Transform a force applied to a point on the body to a force and moment at the frame origin. More... | |
| ChWrenchd | AppliedForceParentToWrenchParent (const ChVector3d &force, const ChVector3d &appl_point) |
| Transform a force applied to a point on the body to a force and moment at the frame origin. More... | |
| Public Member Functions inherited from chrono::ChFrameMoving< double > | |
| ChFrameMoving () | |
| Default constructor (identity frame). | |
| ChFrameMoving (const ChVector3< double > &v, const ChQuaternion< double > &q=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from pos and rot (as a quaternion). | |
| ChFrameMoving (const ChVector3< double > &v, const ChMatrix33< double > &R) | |
| Construct from pos and rotation (as a 3x3 matrix). | |
| ChFrameMoving (const ChCoordsys< double > &C) | |
| Construct from a coordsys. | |
| ChFrameMoving (const ChFrame< double > &F) | |
| Construct from a frame. | |
| ChFrameMoving (const ChFrameMoving< double > &other) | |
| Copy constructor, build from another moving frame. | |
| virtual | ~ChFrameMoving () |
| Destructor. | |
| ChFrameMoving< double > & | operator= (const ChFrameMoving< double > &other) |
| Assignment operator: copy from another moving frame. | |
| ChFrameMoving< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrameMoving< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrameMoving< double > &other) const |
| Returns true for different frames. | |
| ChFrameMoving< double > | operator>> (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > | operator* (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChFrameMoving< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrameMoving< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. | |
| ChFrameMoving< double > & | operator*= (const ChFrameMoving< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsysDt () const |
| Return both rotation and translation velocities as a ChCoordsys object. | |
| const ChCoordsys< double > & | GetCoordsysDt2 () const |
| Return both rotation and translation accelerations as a ChCoordsys object. | |
| const ChVector3< double > & | GetPosDt () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetLinVel () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetPosDt2 () const |
| Return the linear acceleration. | |
| const ChVector3< double > & | GetLinAcc () const |
| Return the linear acceleration. | |
| const ChQuaternion< double > & | GetRotDt () const |
| Return the rotation velocity as a quaternion. | |
| const ChQuaternion< double > & | GetRotDt2 () const |
| Return the rotation acceleration as a quaternion. | |
| ChVector3< double > | GetAngVelLocal () const |
| Compute the angular velocity (expressed in local coords). | |
| ChVector3< double > | GetAngVelParent () const |
| Compute the actual angular velocity (expressed in parent coords). | |
| ChVector3< double > | GetAngAccLocal () const |
| Compute the actual angular acceleration (expressed in local coords). | |
| ChVector3< double > | GetAngAccParent () const |
| Compute the actual angular acceleration (expressed in parent coords). | |
| virtual void | SetCoordsysDt (const ChCoordsys< double > &csys_dt) |
| Set both linear and rotation velocities as a single ChCoordsys derivative. | |
| virtual void | SetPosDt (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetLinVel (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetRotDt (const ChQuaternion< double > &q_dt) |
| Set the rotation velocity as a quaternion derivative. More... | |
| virtual void | SetAngVelLocal (const ChVector3< double > &w) |
| Set the rotation velocity from the given angular velocity (expressed in local coordinates). | |
| virtual void | SetAngVelParent (const ChVector3< double > &w) |
| Set the rotation velocity from given angular velocity (expressed in parent coordinates). | |
| virtual void | SetCoordsysDt2 (const ChCoordsys< double > &csys_dtdt) |
| Set the linear and rotation accelerations as a single ChCoordsys derivative. | |
| virtual void | SetPosDt2 (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetLinAcc (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetRotDt2 (const ChQuaternion< double > &q_dtdt) |
| Set the rotation acceleration as a quaternion derivative. More... | |
| virtual void | SetAngAccLocal (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in local coordinates). More... | |
| virtual void | SetAngAccParent (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in parent coordinates). | |
| void | ComputeRotMatDt (ChMatrix33< double > &R_dt) const |
| Compute the time derivative of the rotation matrix. | |
| void | ComputeRotMatDt2 (ChMatrix33< double > &R_dtdt) |
| Compute the second time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt () |
| Return the time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt2 () |
| Return the second time derivative of the rotation matrix. | |
| void | ConcatenatePreTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos) const |
| Return the velocity in the parent frame of a point fixed to this frame and expressed in local coordinates. | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed) const |
| Return the velocity in the parent frame of a moving point, given the point location and velocity expressed in local coordinates. | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos) const |
| Return the acceleration in the parent frame of a point fixed to this frame and expressed in local coordinates. More... | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed, const ChVector3< double > &localacc) const |
| Return the acceleration in the parent frame of a moving point, given the point location, velocity, and acceleration expressed in local coordinates. | |
| ChVector3< double > | PointSpeedParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed) const |
| Return the velocity of a point expressed in this frame, given the point location and velocity in the parent frame. | |
| ChVector3< double > | PointAccelerationParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed, const ChVector3< double > &parentacc) const |
| Return the acceleration of a point expressed in this frame, given the point location, velocity, and acceleration in the parent frame. | |
| ChFrameMoving< double > | TransformLocalToParent (const ChFrameMoving< double > &F) const |
| Transform a moving frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrameMoving< double > | TransformParentToLocal (const ChFrameMoving< double > &F) const |
| Transform a moving frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrameMoving< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrameMoving< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| virtual void | Invert () override |
| Invert in place. More... | |
| ChFrameMoving< double > | GetInverse () const |
| Return the inverse transform. | |
| Public Member Functions inherited from chrono::ChFrame< double > | |
| ChFrame () | |
| Default constructor (identity frame). | |
| ChFrame (const ChVector3< double > &v, const ChQuaternion< double > &q=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from position and rotation (as quaternion). | |
| ChFrame (const ChVector3< double > &v, const ChMatrix33< double > &R) | |
| Construct from pos and rotation (as a 3x3 matrix). | |
| ChFrame (const ChVector3< double > &v, const double angle, const ChVector3< double > &u) | |
| Construct from position mv and rotation of angle alpha around unit vector mu. | |
| ChFrame (const ChCoordsys< double > &C) | |
| Construct from a coordsys. | |
| ChFrame (const ChFrame< double > &other) | |
| Copy constructor, build from another frame. | |
| ChFrame< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrame< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrame< double > &other) const |
| Returns true for different frames. | |
| ChFrame< double > | operator* (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator* (const ChVector3< double > &v) const |
| Transform a vector through this frame (express in parent frame). More... | |
| ChFrame< double > | operator>> (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator/ (const ChVector3< double > &v) const |
| Transform a vector through this frame (express from parent frame). More... | |
| ChFrame< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrame< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrame< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrame< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrame< double > & | operator*= (const ChFrame< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsys () const |
| Return both current rotation and translation as a ChCoordsys object. | |
| const ChVector3< double > & | GetPos () const |
| Return the current translation vector. | |
| const ChQuaternion< double > & | GetRot () const |
| Return the current rotation quaternion. | |
| const ChMatrix33< double > & | GetRotMat () const |
| Return the current 3x3 rotation matrix. | |
| ChVector3< double > | GetRotAxis () const |
| Get axis of finite rotation, in parent space. | |
| double | GetRotAngle () const |
| Get angle of rotation about axis of finite rotation. | |
| virtual void | SetCoordsys (const ChCoordsys< double > &C) |
| Impose both translation and rotation as a single ChCoordsys. More... | |
| virtual void | SetCoordsys (const ChVector3< double > &v, const ChQuaternion< double > &q) |
| Impose both translation and rotation. More... | |
| virtual void | SetRot (const ChQuaternion< double > &q) |
| Impose the rotation as a quaternion. More... | |
| virtual void | SetRot (const ChMatrix33< double > &R) |
| Impose the rotation as a 3x3 matrix. More... | |
| virtual void | SetPos (const ChVector3< double > &pos) |
| Impose the translation vector. | |
| void | ConcatenatePreTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| void | Move (const ChVector3< double > &v) |
| An easy way to move the frame by the amount specified by vector v, (assuming v expressed in parent coordinates) | |
| void | Move (const ChCoordsys< double > &C) |
| Apply both translation and rotation, assuming both expressed in parent coordinates, as a vector for translation and quaternion for rotation,. | |
| ChVector3< double > | TransformPointLocalToParent (const ChVector3< double > &v) const |
| Transform a point from the local frame coordinate system to the parent coordinate system. | |
| ChVector3< double > | TransformPointParentToLocal (const ChVector3< double > &v) const |
| Transforms a point from the parent coordinate system to local frame coordinate system. | |
| ChVector3< double > | TransformDirectionLocalToParent (const ChVector3< double > &d) const |
| Transform a direction from the parent frame coordinate system to 'this' local coordinate system. | |
| ChVector3< double > | TransformDirectionParentToLocal (const ChVector3< double > &d) const |
| Transforms a direction from 'this' local coordinate system to parent frame coordinate system. | |
| ChWrench< double > | TransformWrenchLocalToParent (const ChWrench< double > &w) const |
| Transform a wrench from the local coordinate system to the parent coordinate system. | |
| ChWrench< double > | TransformWrenchParentToLocal (const ChWrench< double > &w) const |
| Transform a wrench from the parent coordinate system to the local coordinate system. | |
| ChFrame< double > | TransformLocalToParent (const ChFrame< double > &F) const |
| Transform a frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrame< double > | TransformParentToLocal (const ChFrame< double > &F) const |
| Transform a frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrame< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrame< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| void | Normalize () |
| Normalize the rotation, so that quaternion has unit length. | |
| virtual void | SetIdentity () |
| Sets to no translation and no rotation. | |
| ChFrame< double > | GetInverse () const |
| Return the inverse transform. | |
| Public Member Functions inherited from chrono::ChContactable | |
| void | AddCollisionModel (std::shared_ptr< ChCollisionModel > model) |
| Add the collision model. | |
| void | AddCollisionShape (std::shared_ptr< ChCollisionShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add a collision shape. More... | |
| std::shared_ptr< ChCollisionModel > | GetCollisionModel () const |
| Access the collision model. | |
| void | SetUserData (const std::shared_ptr< void > &data) |
| Set user-data associated with this contactable. | |
| bool | HasData () const |
| Check if this contactable has associated user-data. | |
| template<typename T > | |
| std::shared_ptr< T > | GetUserData () const |
| Get the user-data using static cast to a known type. | |
| void | ArchiveOut (ChArchiveOut &archive_out) |
| Method to allow serialization of transient data to archives. | |
| void | ArchiveIn (ChArchiveIn &archive_in) |
| Method to allow deserialization of transient data from archives. | |
| Public Member Functions inherited from chrono::ChLoadableUVW | |
| virtual bool | IsTetrahedronIntegrationNeeded () |
| If true, use quadrature over u,v,w in [0..1] range as tetrahedron volumetric coords (with z=1-u-v-w) otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
| virtual bool | IsTrianglePrismIntegrationNeeded () |
| If true, use quadrature over u,v in [0..1] range as triangle natural coords (with z=1-u-v), and use linear quadrature over w in [-1..+1], otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
Static Public Member Functions | |
| static void * | ArchiveInConstructor (ChArchiveIn &archive_in) |
| Serialization for non-default constructor classes. | |
Additional Inherited Members | |
| Public Types inherited from chrono::ChContactable | |
| enum | Type { Type::UNKNOWN, Type::ONE_1, Type::ONE_2, Type::ONE_3, Type::ONE_4, Type::ONE_5, Type::ONE_6, Type::TWO_33, Type::TWO_66, Type::THREE_333, Type::THREE_666 } |
| Contactable type (based on number of variables objects and their DOFs). More... | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChBody | |
| std::vector< std::shared_ptr< ChMarker > > | marklist |
| list of markers | |
| std::vector< std::shared_ptr< ChForce > > | forcelist |
| list of forces | |
| ChVector3d | gyro |
| gyroscopic torque, i.e. Qm = Wvel x (XInertia*Wvel) | |
| ChVector3d | Xforce |
| force acting on body, applied to COM (in absolute coords) | |
| ChVector3d | Xtorque |
| torque acting on body (in body local coords) | |
| std::vector< WrenchAccumulator > | accumulators |
| ChVariablesBodyOwnMass | variables |
| interface to solver (store inertia and coordinates) | |
| float | max_speed |
| limit on linear speed | |
| float | max_wvel |
| limit on angular velocity | |
| float | sleep_time |
| float | sleep_minspeed |
| float | sleep_minwvel |
| float | sleep_starttime |
| unsigned int | index |
| unique sequential body identifier, used for indexing (internal use only) | |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
| ChSystem * | system |
| parent system | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of Lagrange multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
| Protected Attributes inherited from chrono::ChFrameMoving< double > | |
| ChCoordsys< double > | m_csys_dt |
| rotation and position velocity, as vector + quaternion | |
| ChCoordsys< double > | m_csys_dtdt |
| rotation and position acceleration, as vector + quaternion | |
| Protected Attributes inherited from chrono::ChFrame< double > | |
| ChCoordsys< double > | m_csys |
| position and rotation, as vector + quaternion | |
| ChMatrix33< double > | m_rmat |
| 3x3 orthogonal rotation matrix | |
| Protected Attributes inherited from chrono::ChContactable | |
| std::shared_ptr< ChCollisionModel > | collision_model |
| collision model for the contactable object | |
| std::vector< ChVariables * > | m_contactable_variables |
| variables associated with the contactable object | |
| std::shared_ptr< void > | m_data |
| arbitrary user-data | |
Constructor & Destructor Documentation
◆ ChBodyEasyClusterOfSpheres() [1/2]
| chrono::ChBodyEasyClusterOfSpheres::ChBodyEasyClusterOfSpheres | ( | const std::vector< ChVector3d > & | positions, |
| const std::vector< double > & | radii, | ||
| double | density, | ||
| bool | create_visualization = true, |
||
| bool | create_collision = false, |
||
| std::shared_ptr< ChContactMaterial > | material = nullptr |
||
| ) |
Create a rigid body with optional sphere cluster mesh visualization and/or collision shapes.
The cluster of spheres will be displaced so that their center of mass corresponds to the origin of the body. Mass and inertia are set automatically depending on density.
- Parameters
-
positions position of the spheres radii sphere radius density density of the body create_visualization create visualization asset create_collision enable collision material surface contact material
◆ ChBodyEasyClusterOfSpheres() [2/2]
| chrono::ChBodyEasyClusterOfSpheres::ChBodyEasyClusterOfSpheres | ( | const std::vector< ChVector3d > & | positions, |
| const std::vector< double > & | radii, | ||
| double | density, | ||
| std::shared_ptr< ChContactMaterial > | material | ||
| ) |
Create a ChBody with a sphere cluster mesh visualization and collision shapes.
The cluster of spheres will be displaced so that their center of mass corresponds to the origin of the ChBody. Mass and inertia are set automatically depending on density.
- Parameters
-
positions position of the spheres radii sphere radius density density of the body material surface contact material
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyEasy.h
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyEasy.cpp
