chrono::vehicle::rccar::RCCar Class Reference
Description
Definition of the RCCar assembly.
This class encapsulates a concrete wheeled vehicle model with parameters corresponding to a RC car, the powertrain model, and the 4 tires. It provides wrappers to access the different systems and subsystems, functions for specifying the tire types, as well as functions for controlling the visualization mode of each component.
#include <RCCar.h>
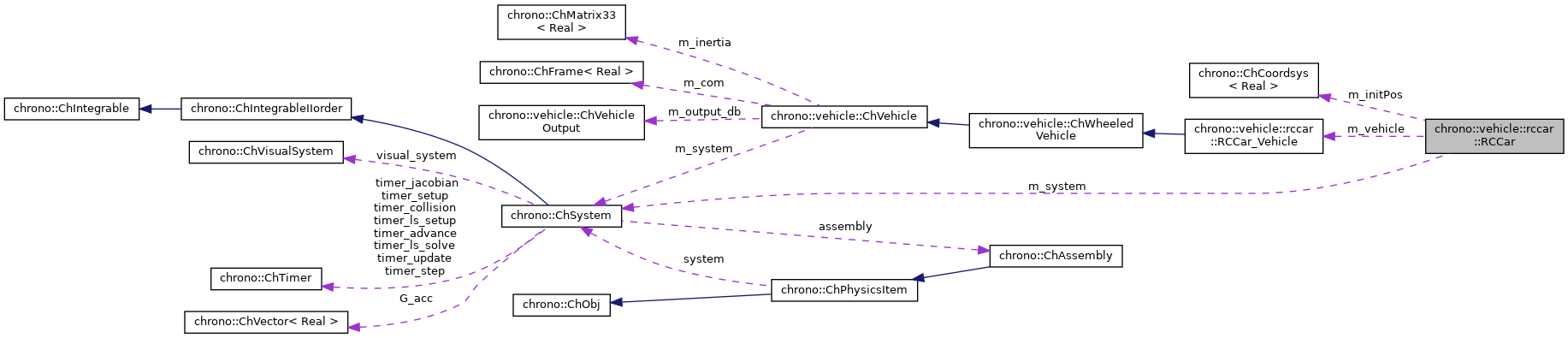
Collaboration diagram for chrono::vehicle::rccar::RCCar:
Public Member Functions | |
| RCCar (ChSystem *system) | |
| void | SetContactMethod (ChContactMethod val) |
| void | SetChassisFixed (bool val) |
| void | SetChassisCollisionType (CollisionType val) |
| void | SetTireType (TireModelType val) |
| void | SetInitPosition (const ChCoordsys<> &pos) |
| void | SetInitFwdVel (double fwdVel) |
| void | SetInitWheelAngVel (const std::vector< double > &omega) |
| void | SetTireStepSize (double step_size) |
| ChSystem * | GetSystem () const |
| ChWheeledVehicle & | GetVehicle () const |
| std::shared_ptr< ChChassis > | GetChassis () const |
| std::shared_ptr< ChBodyAuxRef > | GetChassisBody () const |
| void | Initialize () |
| void | LockAxleDifferential (int axle, bool lock) |
| void | SetAerodynamicDrag (double Cd, double area, double air_density) |
| void | SetChassisVisualizationType (VisualizationType vis) |
| void | SetSuspensionVisualizationType (VisualizationType vis) |
| void | SetSteeringVisualizationType (VisualizationType vis) |
| void | SetWheelVisualizationType (VisualizationType vis) |
| void | SetTireVisualizationType (VisualizationType vis) |
| void | SetMaxMotorVoltageRatio (double voltage_ratio) |
| Set parameters for tuning engine map. | |
| void | SetStallTorque (double stall_torque) |
| Set stall torque. | |
| void | SetTireRollingResistance (double rolling_resistance) |
| Set tire rolling friction coefficient. | |
| void | Synchronize (double time, const DriverInputs &driver_inputs, const ChTerrain &terrain) |
| void | Advance (double step) |
| void | LogHardpointLocations () |
| void | DebugLog (int what) |
Protected Attributes | |
| ChContactMethod | m_contactMethod |
| CollisionType | m_chassisCollisionType |
| bool | m_fixed |
| TireModelType | m_tireType |
| double | m_tire_step_size |
| ChCoordsys | m_initPos |
| double | m_initFwdVel |
| std::vector< double > | m_initOmega |
| bool | m_apply_drag |
| double | m_Cd |
| double | m_area |
| double | m_air_density |
| ChSystem * | m_system |
| RCCar_Vehicle * | m_vehicle |
| double | m_tire_mass |
| double | m_stall_torque |
| double | m_voltage_ratio |
| double | m_rolling_friction_coeff |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_models/vehicle/rccar/RCCar.h
- /builds/uwsbel/chrono/src/chrono_models/vehicle/rccar/RCCar.cpp
