Description
Base class for all MBS nodes with tracks.
#include <ChVehicleCosimTrackedMBSNode.h>
Public Member Functions | |
| virtual NodeType | GetNodeType () const override |
| Return the node type as NodeType::MBS_TRACKED. | |
| void | SetChassisFixed (bool val) |
| Fix the chassis to ground (default: false). | |
| void | AttachDrawbarPullRig (std::shared_ptr< ChVehicleCosimDBPRig > rig) |
| Attach a drawbar pull rig to the MBS system. | |
| std::shared_ptr< ChVehicleCosimDBPRig > | GetDrawbarPullRig () const |
| Return the drawbar-pull rig, if one is attached. | |
| virtual void | Initialize () override final |
| Initialize this node. More... | |
| std::shared_ptr< ChBezierCurve > | GetPath () const |
| Get vehicle path. More... | |
| virtual void | Synchronize (int step_number, double time) override final |
| Synchronize this node. More... | |
| virtual void | Advance (double step_size) override final |
| Advance simulation. More... | |
| virtual void | OutputData (int frame) override final |
| Output logging and debugging data. | |
| virtual void | OutputVisualizationData (int frame) override final |
| Output post-processing visualization data. | |
 Public Member Functions inherited from chrono::vehicle::ChVehicleCosimBaseNode Public Member Functions inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| std::string | GetNodeTypeString () const |
| Return the node type as a string. | |
| bool | IsCosimNode () const |
| Return true if this node is part of the co-simulation infrastructure. | |
| void | SetStepSize (double step) |
| Set the integration step size (default: 1e-4). | |
| double | GetStepSize () const |
| Get the integration step size. | |
| void | SetOutDir (const std::string &dir_name, const std::string &suffix="") |
| Set the name of the output directory and an identifying suffix. More... | |
| void | SetVerbose (bool verbose) |
| Enable/disable verbose messages during simulation (default: true). | |
| void | EnableRuntimeVisualization (double render_fps=100, bool save_img=false) |
| Enable run-time visualization (default: false). More... | |
| void | SetCameraPosition (const ChVector3d &cam_pos, const ChVector3d &cam_target=VNULL) |
| Set camera location and target point. | |
| void | SetCameraTracking (bool track) |
| Enable/disable tracking of objects (default: true). | |
| void | EnablePostprocessVisualization (double render_fps=100) |
| Enable Blender postprocessing (default: false). More... | |
| const std::string & | GetOutDirName () const |
| Get the output directory name for this node. | |
| double | GetStepExecutionTime () const |
| Get the simulation execution time for the current step on this node. More... | |
| double | GetTotalExecutionTime () const |
| Get the cumulative simulation execution time on this node. | |
| virtual void | OnRender () |
| Render the current simulation frame. More... | |
| void | Render (double step_size) |
| Render simulation frame. More... | |
| virtual void | WriteCheckpoint (const std::string &filename) const |
| Write checkpoint to the specified file (which will be created in the output directory). | |
Protected Member Functions | |
| ChVehicleCosimTrackedMBSNode () | |
| Construct a base class tracked MBS co-simulation node. More... | |
| virtual void | InitializeMBS (const ChVector2d &terrain_size, double terrain_height)=0 |
| Initialize the underlying MBS. More... | |
| virtual utils::ChBodyGeometry | GetTrackShoeContactGeometry () const =0 |
| Return terrain contact geometry and material information for one track shoe. | |
| virtual double | GetTrackShoeMass () const =0 |
| Return mass of one track shoe. | |
| virtual void | PreAdvance (double step_size) |
| Perform any required operations before advancing the state of the MBS. More... | |
| virtual void | PostAdvance (double step_size) |
| Perform any required operations after advancing the state of the MBS. More... | |
| virtual void | OnOutputData (int frame) |
| Perform additional output at the specified frame (called from within OutputData). More... | |
| virtual void | ApplyTrackShoeForce (int track_id, int shoe_id, const TerrainForce &force)=0 |
| Apply the provided force to the specified track shoe body This function is called during synchronization when the force is received from the corresponding track node. | |
| virtual unsigned int | GetNumTracks () const =0 |
| Get the number of track subsystems defined by the underlying MBS. | |
| virtual size_t | GetNumTrackShoes (int track_id) const =0 |
| Return the number of track shoes in the specified track subsystem. | |
| virtual size_t | GetNumTrackShoes () const =0 |
| Return the total number of track shoes (in all track subsystems). | |
| virtual std::shared_ptr< ChBody > | GetTrackShoeBody (int track_id, int shoe_id) const =0 |
| Return the specified track shoe. | |
| virtual BodyState | GetTrackShoeState (int track_id, int shoe_id) const =0 |
| Get the body state of the specified track shoe body. | |
| virtual std::shared_ptr< ChBody > | GetChassisBody () const =0 |
| Get the "chassis" body. | |
| virtual double | GetSprocketAddendumRadius () const =0 |
| Get the sprocket addendum radius (for slip calculation). | |
| virtual void | OnInitializeDBPRig (std::shared_ptr< ChFunction > func)=0 |
| Impose sprocket angular speed function. More... | |
| Protected Member Functions inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| ChVehicleCosimBaseNode (const std::string &name) | |
| void | SendGeometry (const utils::ChBodyGeometry &geom, int dest) const |
| Utility function to pack and send a struct with geometry information. | |
| void | RecvGeometry (utils::ChBodyGeometry &geom, int source) const |
| Utility function to receive and unpack a struct with geometry information. | |
| void | ProgressBar (unsigned int x, unsigned int n, unsigned int w=50) |
| Utility function to display a progress bar to the terminal. More... | |
Protected Attributes | |
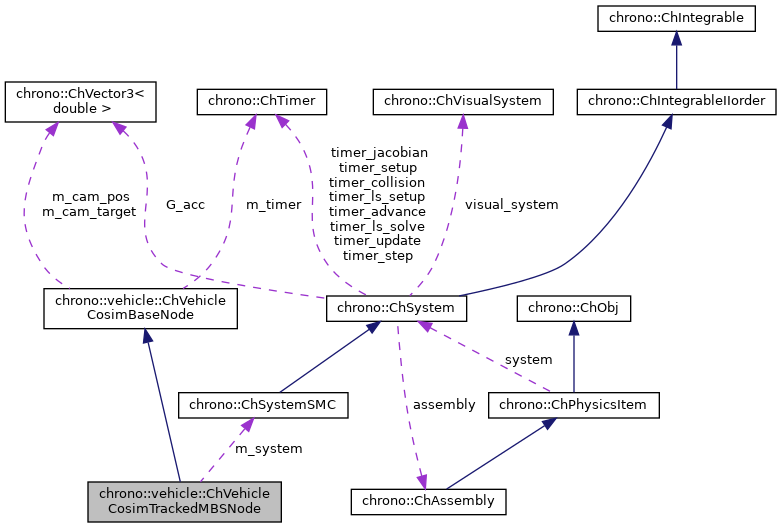
| ChSystemSMC * | m_system |
| containing system | |
| std::shared_ptr< ChVehicleCosimDBPRig > | m_DBP_rig |
| DBP rig. | |
| std::ofstream | m_DBP_outf |
| DBP output file stream. | |
| Protected Attributes inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| int | m_rank |
| MPI rank of this node (in MPI_COMM_WORLD) | |
| double | m_step_size |
| integration step size | |
| std::string | m_name |
| name of the node | |
| std::string | m_out_dir |
| top-level output directory | |
| std::string | m_node_out_dir |
| node-specific output directory | |
| std::ofstream | m_outf |
| output file stream | |
| bool | m_renderRT |
| if true, perform run-time rendering | |
| bool | m_renderRT_all |
| if true, render all frames | |
| double | m_renderRT_step |
| time step between rendered frames | |
| bool | m_writeRT |
| if true, write images to file | |
| bool | m_renderPP |
| if true, save data for post-processing | |
| bool | m_renderPP_all |
| if true, save data at all frames | |
| double | m_renderPP_step |
| time step between post-processing save frames | |
| bool | m_track |
| track objects | |
| ChVector3d | m_cam_pos |
| camera location | |
| ChVector3d | m_cam_target |
| camera target (lookat) point | |
| unsigned int | m_num_wheeled_mbs_nodes |
| unsigned int | m_num_tracked_mbs_nodes |
| unsigned int | m_num_terrain_nodes |
| unsigned int | m_num_tire_nodes |
| ChTimer | m_timer |
| timer for integration cost | |
| double | m_cum_sim_time |
| cumulative integration cost | |
| bool | m_verbose |
| verbose messages during simulation? | |
Additional Inherited Members | |
| Public Types inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| enum | NodeType { NodeType::MBS_WHEELED, NodeType::MBS_TRACKED, NodeType::TERRAIN, NodeType::TIRE } |
| Type of node participating in co-simulation. More... | |
| enum | InterfaceType { InterfaceType::BODY, InterfaceType::MESH } |
| Type of the vehicle-terrain communication interface. More... | |
| Static Public Member Functions inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| static std::string | OutputFilename (const std::string &dir, const std::string &root, const std::string &ext, int frame, int frame_digits) |
| Utility function for creating an output file name. More... | |
| Static Protected Attributes inherited from chrono::vehicle::ChVehicleCosimBaseNode | |
| static const double | m_gacc = -9.81 |
Constructor & Destructor Documentation
◆ ChVehicleCosimTrackedMBSNode()
|
protected |
Construct a base class tracked MBS co-simulation node.
By default, the underlying Chrono system is set yo use the Barzilai-Borwein solver and the Euler implicit linearized integrator. All OpenMP thread numbers are set to 1.
Member Function Documentation
◆ Advance()
|
finaloverridevirtual |
Advance simulation.
This function is called after a synchronization to allow the node to advance its state by the specified time step. A node is allowed to take as many internal integration steps as required, but no inter-node communication should occur.
Implements chrono::vehicle::ChVehicleCosimBaseNode.
◆ GetPath()
|
inline |
Get vehicle path.
This may be empty (nullptr) if the terrain subsystem did not provide path information. Note: If available, the vehicle path can be queried only after initialization.
◆ Initialize()
|
finaloverridevirtual |
Initialize this node.
This function allows the node to initialize itself and, optionally, perform an initial data exchange with any other node.
Reimplemented from chrono::vehicle::ChVehicleCosimBaseNode.
◆ InitializeMBS()
|
protectedpure virtual |
Initialize the underlying MBS.
- Parameters
-
terrain_size terrain length x width terrain_height initial terrain height
◆ OnInitializeDBPRig()
|
protectedpure virtual |
Impose sprocket angular speed function.
This function is called (during initialization, after the call to InitializeMBS) only if a drawbar-pull rig is attached. A derived class must enforce the specified angular speed on all sprockets and, if appropriate, disconnect any other power transmission mechanism (such as a powertrain/driveline).
◆ OnOutputData()
|
inlineprotectedvirtual |
Perform additional output at the specified frame (called from within OutputData).
For example, output mechanism-specific data for post-processing.
◆ PostAdvance()
|
inlineprotectedvirtual |
Perform any required operations after advancing the state of the MBS.
This function is called after every integration step.
◆ PreAdvance()
|
inlineprotectedvirtual |
Perform any required operations before advancing the state of the MBS.
This function is called before every integration step.
◆ Synchronize()
|
finaloverridevirtual |
Synchronize this node.
This function is called at every co-simulation synchronization time to allow the node to exchange information with any other node.
Implements chrono::vehicle::ChVehicleCosimBaseNode.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/cosim/ChVehicleCosimTrackedMBSNode.h
- /builds/uwsbel/chrono/src/chrono_vehicle/cosim/ChVehicleCosimTrackedMBSNode.cpp
