chrono::vehicle::ChInteractiveDriver Class Reference
Description
Interactive driver for the a vehicle.
This class implements support for keyboard or joystick control of a vehicle, but is independent of a particular implementation of a keyboard/joystick event handler.
#include <ChInteractiveDriver.h>
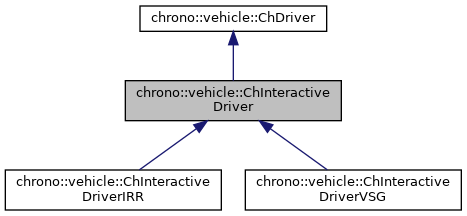
Inheritance diagram for chrono::vehicle::ChInteractiveDriver:
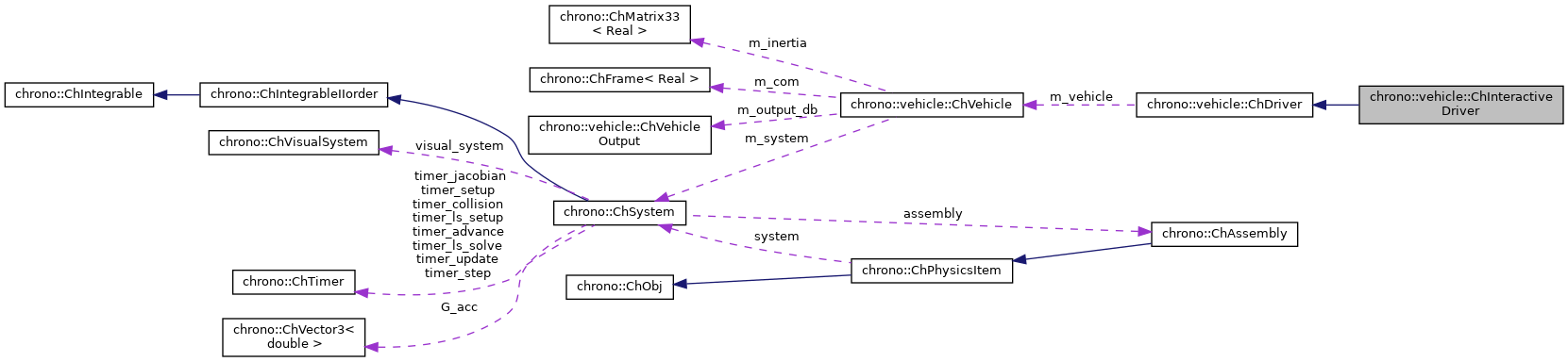
Collaboration diagram for chrono::vehicle::ChInteractiveDriver:
Public Types | |
| enum | InputMode { InputMode::LOCK, InputMode::KEYBOARD, InputMode::JOYSTICK } |
| Functioning modes for a ChInteractiveDriver. More... | |
Public Member Functions | |
| ChInteractiveDriver (ChVehicle &vehicle) | |
| Construct an interactive driver. | |
| virtual bool | HasJoystick () const |
| Check if joystick is supported. | |
| void | SetInputMode (InputMode mode) |
| Set the current functioning mode. | |
| InputMode | GetInputMode () const |
| void | SetThrottleDelta (double delta) |
| Set the increment in throttle input for each recorded keypress (default 1/50). | |
| void | SetSteeringDelta (double delta) |
| Set the increment in steering input for each recorded keypress (default 1/50). | |
| void | SetBrakingDelta (double delta) |
| Set the increment in braking input for each recorded keypress (default 1/50). | |
| void | SetClutchDelta (double delta) |
| Set the increment in clutch input for each recorded keypress (default 1/50). | |
| void | SetStepsize (double val) |
| Set the step size for integration of the internal driver dynamics. | |
| void | SetGains (double steering_gain=1, double throttle_gain=1, double braking_gain=1, double clutch_gain=1) |
| Set gains for internal dynamics. More... | |
| void | IncreaseThrottle () |
| Increase Throttle. | |
| void | DecreaseThrottle () |
| Decrease Throttle. | |
| void | SteeringLeft () |
| Steering Left. | |
| void | SteeringRight () |
| Steering Right. | |
| void | IncreaseClutch () |
| Increase Clutch. | |
| void | DecreaseClutch () |
| Decrease Clutch. | |
| void | SteeringCenter () |
| Center Steering. | |
| void | ReleasePedals () |
| Release Pedals. | |
| virtual void | Synchronize (double time) override |
| Update the state of this driver system at the specified time. | |
| virtual void | Advance (double step) override |
| Advance the state of this driver system by the specified time step. | |
 Public Member Functions inherited from chrono::vehicle::ChDriver Public Member Functions inherited from chrono::vehicle::ChDriver | |
| ChDriver (ChVehicle &vehicle) | |
| Construct a driver subsystem associated with the given vehicle. | |
| double | GetThrottle () const |
| Get the driver throttle input (in the range [0,1]). | |
| double | GetSteering () const |
| Get the driver steering input (in the range [-1,+1]). | |
| double | GetBraking () const |
| Get the driver braking input (in the range [0,1]). | |
| double | GetClutch () const |
| Get the driver clutch input (in the range [0,1]). | |
| DriverInputs | GetInputs () const |
| Get all current inputs at once. | |
| virtual void | Initialize () |
| Initialize this driver system. | |
| bool | LogInit (const std::string &filename) |
| Initialize output file for recording driver inputs. | |
| bool | Log (double time) |
| Record the current driver inputs to the log file. | |
| void | SetSteering (double steering) |
| Overwrite the value for the driver steering input (input is clamped in [-1,+1]). | |
| void | SetThrottle (double throttle) |
| Overwrite the value for the driver throttle input (input is clamped in [0,+1]). | |
| void | SetBraking (double braking) |
| Overwrite the value for the driver braking input (input is clamped in [0,+1]). | |
| void | SetClutch (double clutch) |
| Overwrite the value for the clutch braking input (input is clamped in [0,+1]). | |
| virtual void | WriteCheckpoint (ChCheckpoint::Format format, const std::string &filename) const |
| Checkpoint the state of this driver to the given checkpoint file. More... | |
| virtual void | ReadCheckpoint (ChCheckpoint::Format format, const std::string &filename) |
| Initialize this driver from the given checkpoint file. More... | |
Protected Attributes | |
| InputMode | m_mode |
| current mode of the driver | |
| double | m_steering_target |
| current target value for steering input | |
| double | m_throttle_target |
| current target value for throttle input | |
| double | m_braking_target |
| current target value for braking input | |
| double | m_clutch_target |
| current target value for clutch input | |
| double | m_stepsize |
| time step for internal dynamics | |
| double | m_steering_delta |
| steering increment on each keypress | |
| double | m_throttle_delta |
| throttle increment on each keypress | |
| double | m_braking_delta |
| braking increment on each keypress | |
| double | m_clutch_delta |
| clutch increment on each keypress | |
| double | m_steering_gain |
| gain for steering internal dynamics | |
| double | m_throttle_gain |
| gain for throttle internal dynamics | |
| double | m_braking_gain |
| gain for braking internal dynamics | |
| double | m_clutch_gain |
| gain for clutch internal dynamics | |
| Protected Attributes inherited from chrono::vehicle::ChDriver | |
| ChVehicle & | m_vehicle |
| reference to associated vehicle | |
| double | m_throttle |
| current value of throttle input | |
| double | m_steering |
| current value of steering input | |
| double | m_braking |
| current value of braking input | |
| double | m_clutch |
| current value of clutch input | |
Member Enumeration Documentation
◆ InputMode
|
strong |
Functioning modes for a ChInteractiveDriver.
| Enumerator | |
|---|---|
| LOCK | driver inputs locked at current values |
| KEYBOARD | driver inputs from keyboard |
| JOYSTICK | driver inputs from joystick |
Member Function Documentation
◆ SetGains()
| void chrono::vehicle::ChInteractiveDriver::SetGains | ( | double | steering_gain = 1, |
| double | throttle_gain = 1, |
||
| double | braking_gain = 1, |
||
| double | clutch_gain = 1 |
||
| ) |
Set gains for internal dynamics.
Default values are 4.0.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/driver/ChInteractiveDriver.h
- /builds/uwsbel/chrono/src/chrono_vehicle/driver/ChInteractiveDriver.cpp
