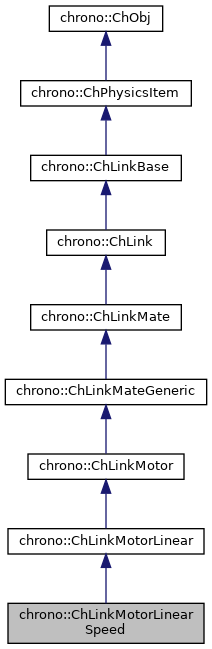
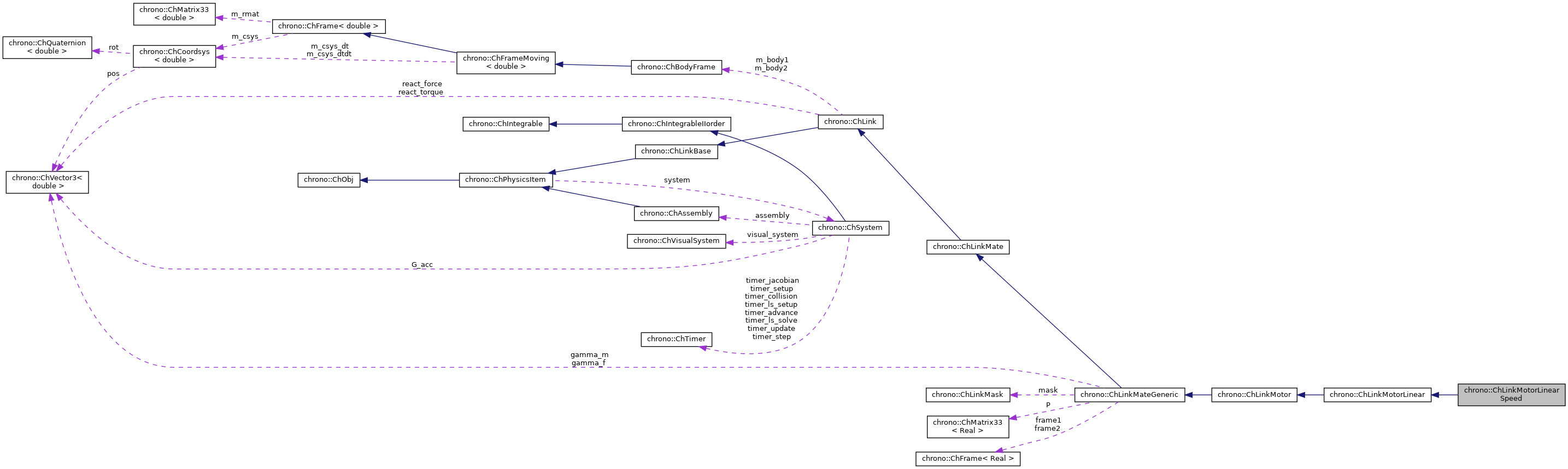
Description
A linear motor that enforces the speed v(t) between two frames on two bodies, using a rheonomic constraint.
Note: no compliance is allowed, so if the actuator hits an undeformable obstacle it hits a pathological situation and the solver result can be unstable/unpredictable. Think at it as a servo drive with "infinitely stiff" control. This type of motor is very easy to use, stable and efficient, and should be used if the 'infinitely stiff' control assumption is a good approximation of what you simulate (e.g., very good and reactive controllers). By default it is initialized with constant speed: df/dt= 1. Use SetSpeedFunction() to change to other speed functions.
#include <ChLinkMotorLinearSpeed.h>
Public Member Functions | |
| ChLinkMotorLinearSpeed (const ChLinkMotorLinearSpeed &other) | |
| virtual ChLinkMotorLinearSpeed * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| void | SetSpeedFunction (const std::shared_ptr< ChFunction > function) |
| Set the speed function of time v(t). More... | |
| std::shared_ptr< ChFunction > | GetSpeedFunction () const |
| Get the speed function v(t). | |
| void | SetMotionOffset (double mo) |
| Get initial offset, by default = 0. | |
| double | GetMotionOffset () |
| Get initial offset. | |
| void | SetAvoidPositionDrift (bool mb) |
| Set if the constraint must avoid position drift. More... | |
| bool | GetAvoidPositionDrift () |
| Set if the constraint is in "avoid position drift" mode. | |
| virtual double | GetMotorForce () const override |
| Get the current actuator reaction force. | |
| virtual unsigned int | GetNumCoordsPosLevel () override |
| Get the number of coordinates at the position level. More... | |
| ChVariablesGeneric & | Variables () |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. More... | |
 Public Member Functions inherited from chrono::ChLinkMotorLinear Public Member Functions inherited from chrono::ChLinkMotorLinear | |
| ChLinkMotorLinear (const ChLinkMotorLinear &other) | |
| void | SetGuideConstraint (const GuideConstraint mconstraint) |
| "Virtual" copy constructor (covariant return type). More... | |
| void | SetGuideConstraint (bool mc_x, bool mc_y, bool mc_rx, bool mc_ry, bool mc_rz) |
| Sets which movements (of frame 1 respect to frame 2) are constrained. More... | |
| virtual double | GetMotorPos () const |
| Get the current actuator displacement. | |
| virtual double | GetMotorPosDt () const |
| Get the current actuator velocity. | |
| virtual double | GetMotorPosDt2 () const |
| Get the current actuator acceleration. | |
| Public Member Functions inherited from chrono::ChLinkMotor | |
| ChLinkMotor (const ChLinkMotor &other) | |
| void | SetMotorFunction (const std::shared_ptr< ChFunction > function) |
| Set the actuation function of time F(t). More... | |
| std::shared_ptr< ChFunction > | GetMotorFunction () const |
| Get the actuation function F(t). | |
| Public Member Functions inherited from chrono::ChLinkMateGeneric | |
| ChLinkMateGeneric (bool mc_x=true, bool mc_y=true, bool mc_z=true, bool mc_rx=true, bool mc_ry=true, bool mc_rz=true) | |
| ChLinkMateGeneric (const ChLinkMateGeneric &other) | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const override |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| virtual ChFramed | GetFrame1Rel () const override |
| Get the link frame 1, relative to body 1. | |
| virtual ChFramed | GetFrame2Rel () const override |
| Get the link frame 2, relative to body 2. | |
| bool | IsConstrainedX () const |
| bool | IsConstrainedY () const |
| bool | IsConstrainedZ () const |
| bool | IsConstrainedRx () const |
| bool | IsConstrainedRy () const |
| bool | IsConstrainedRz () const |
| void | SetConstrainedCoords (bool mc_x, bool mc_y, bool mc_z, bool mc_rx, bool mc_ry, bool mc_rz) |
| Sets which movements (of frame 1 respect to frame 2) are constrained. | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > body1, std::shared_ptr< ChBodyFrame > body2, ChFrame<> absframe) |
| Initialize the link given the two bodies to be connected and the absolute position of the link. More... | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > body1, std::shared_ptr< ChBodyFrame > body2, bool pos_are_relative, ChFrame<> frame1, ChFrame<> frame2) |
| Initialize the link given the two bodies to be connected and two frames (either referring to absolute or body coordinates) in which the link must be placed. More... | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > body1, std::shared_ptr< ChBodyFrame > body2, bool pos_are_relative, const ChVector3d &point1, const ChVector3d &point2, const ChVector3d &dir1, const ChVector3d &dir2) |
| Initialization based on passing two vectors (point + dir) on the two bodies, which will represent the Z axes of the two frames (X and Y will be built from the Z vector via Gram-Schmidt orthonormalization). More... | |
| virtual void | SetDisabled (bool mdis) override |
| Enable/disable all the constraint of the link as desired. | |
| virtual void | SetBroken (bool mon) override |
| Set this link as 'broken'. | |
| void | SetUseTangentStiffness (bool useKc) |
| Enable/disable calculation of the tangent stiffness matrix (Kc) of this constraint (default: false). | |
| virtual unsigned int | GetNumConstraints () override |
| Get the number of scalar constraints. | |
| virtual unsigned int | GetNumConstraintsBilateral () override |
| Get the number of bilateral scalar constraints. | |
| virtual unsigned int | GetNumConstraintsUnilateral () override |
| Get the number of unilateral scalar constraints. | |
| ChLinkMask & | GetLinkMask () |
| Return link mask. | |
| virtual ChVectorDynamic | GetConstraintViolation () const override |
| Link violation (residuals of the link constraint equations). | |
| Public Member Functions inherited from chrono::ChLinkMate | |
| ChLinkMate (const ChLinkMate &other) | |
| Public Member Functions inherited from chrono::ChLink | |
| ChLink (const ChLink &other) | |
| virtual unsigned int | GetNumAffectedCoords () override |
| Get the number of scalar variables affected by constraints in this link. | |
| ChBodyFrame * | GetBody1 () const |
| Get the constrained body 1. | |
| ChBodyFrame * | GetBody2 () const |
| Get the constrained body 2. | |
| virtual ChFramed | GetFrame1Abs () const override |
| Get the link frame 1, on body 1, expressed in the absolute frame. | |
| virtual ChFramed | GetFrame2Abs () const override |
| Get the link frame 2, on body 2, expressed in the absolute frame. | |
| virtual ChWrenchd | GetReaction1 () const override |
| Get the reaction force and torque on the 1st body, expressed in the link frame 1. | |
| virtual ChWrenchd | GetReaction2 () const override |
| Get the reaction force and torque on the 2nd body object, expressed in the link frame 2. | |
| virtual void | UpdatedExternalTime (double prevtime, double time) |
| Called from a external package (i.e. a plugin, a CAD app.) to report that time has changed. | |
| Public Member Functions inherited from chrono::ChLinkBase | |
| ChLinkBase (const ChLinkBase &other) | |
| bool | IsValid () |
| Tells if the link data is currently valid. More... | |
| void | SetValid (bool mon) |
| Set the status of link validity. | |
| bool | IsDisabled () |
| Tells if all constraints of this link are currently turned on or off by the user. | |
| bool | IsBroken () |
| Tells if the link is broken, for excess of pulling/pushing. | |
| virtual bool | IsActive () const override |
| Return true if the link is currently active and thereofre included into the system solver. More... | |
| virtual bool | IsRequiringWaking () |
| Tells if this link requires that the connected ChBody objects must be waken if they are sleeping. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem(). | |
| virtual void | SetSystem (ChSystem *m_system) |
| Set the pointer to the parent ChSystem(). More... | |
| virtual bool | IsCollisionEnabled () const |
| Tell if the object is subject to collision. More... | |
| virtual void | AddCollisionModelsToSystem (ChCollisionSystem *coll_sys) const |
| Add to the provided collision system any collision models managed by this physics item. More... | |
| virtual void | RemoveCollisionModelsFromSystem (ChCollisionSystem *coll_sys) const |
| Remove from the provided collision system any collision models managed by this physics item. More... | |
| virtual void | SyncCollisionModels () |
| Synchronize the position and bounding box of any collision models managed by this physics item. | |
| virtual ChAABB | GetTotalAABB () const |
| Get the axis-aligned bounding box (AABB) of this object. More... | |
| virtual ChVector3d | GetCenter () const |
| Get a symbolic 'center' of the object. More... | |
| virtual void | Setup () |
| Perform setup operations. More... | |
| virtual void | ForceToRest () |
| Set zero speed (and zero accelerations) in state, without changing the position. More... | |
| virtual unsigned int | GetNumCoordsVelLevel () |
| Get the number of coordinates at the velocity level. More... | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the Lagrange multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the Lagrange multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | IntStateOnEndStep (double T) |
| Called at the end of a step, after the state has been updated. More... | |
| virtual void | IntStateIncrement (const unsigned int off_x, ChState &x_new, const ChState &x, const unsigned int off_v, const ChStateDelta &Dv) |
| Computes x_new = x + Dt , using vectors at specified offsets. More... | |
| virtual void | IntStateGetIncrement (const unsigned int off_x, const ChState &x_new, const ChState &x, const unsigned int off_v, ChStateDelta &Dv) |
| Computes Dt = x_new - x, using vectors at specified offsets. More... | |
| virtual void | VariablesQbIncrementPosition (double step) |
| Increment item positions by the 'qb' part of the ChVariables, multiplied by a 'step' factor. More... | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this object. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a camera to this object. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this object. | |
| void | UpdateVisualModel () |
| Utility function to update only the associated visual assets (if any). | |
| virtual std::string & | ArchiveContainerName () |
Friends | |
| class | ChSystemMulticore |
Additional Inherited Members | |
| Public Types inherited from chrono::ChLinkMotorLinear | |
| enum | GuideConstraint { FREE, PRISMATIC, SPHERICAL } |
| Type of guide constraint. | |
| Public Types inherited from chrono::ChLinkMateGeneric | |
| using | ChConstraintVectorX = Eigen::Matrix< double, Eigen::Dynamic, 1, Eigen::ColMajor, 6, 1 > |
| Static Public Member Functions inherited from chrono::ChLinkMotorLinear | |
| static std::string | GetGuideTypeString (GuideConstraint type) |
| Return a string describing the specified motor guide constraint type. | |
| Protected Member Functions inherited from chrono::ChLinkMateGeneric | |
| void | SetupLinkMask () |
| void | ChangedLinkMask () |
| virtual void | IntStateGatherReactions (const unsigned int off_L, ChVectorDynamic<> &L) override |
| From item's reaction forces to global reaction vector. More... | |
| virtual void | IntStateScatterReactions (const unsigned int off_L, const ChVectorDynamic<> &L) override |
| From global reaction vector to item's reaction forces. More... | |
| virtual void | IntLoadResidual_CqL (const unsigned int off_L, ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) override |
| Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L. More... | |
| virtual void | IntLoadConstraint_C (const unsigned int off, ChVectorDynamic<> &Qc, const double c, const double c_vel, bool do_clamp, double recovery_clamp) override |
| Takes the term C, scale and adds to Qc at given offset: Qc += c*C. More... | |
| virtual void | InjectConstraints (ChSystemDescriptor &descriptor) override |
| Register with the given system descriptor any ChConstraint objects associated with this item. | |
| virtual void | ConstraintsBiReset () override |
| Sets to zero the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_C (double factor=1, double recovery_clamp=0.1, bool do_clamp=false) override |
| Adds the current C (constraint violation) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | LoadConstraintJacobians () override |
| Compute and load current Jacobians in encapsulated ChConstraint objects. | |
| virtual void | ConstraintsFetch_react (double factor=1) override |
| Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints. More... | |
| virtual void | InjectKRMMatrices (ChSystemDescriptor &descriptor) override |
| Register with the given system descriptor any ChKRMBlock objects associated with this item. | |
| virtual void | LoadKRMMatrices (double Kfactor, double Rfactor, double Mfactor) override |
| Add the current stiffness K matrix in encapsulated ChKRMBlock item(s), if any. More... | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChLinkMotorLinear | |
| double | mpos |
| double | mpos_dt |
| double | mpos_dtdt |
| int | m_actuated_idx |
| row index of the actuated constraint (Z axis) | |
| Protected Attributes inherited from chrono::ChLinkMotor | |
| std::shared_ptr< ChFunction > | m_func |
| Protected Attributes inherited from chrono::ChLinkMateGeneric | |
| ChFrame | m_frame1 |
| ChFrame | m_frame2 |
| bool | c_x |
| bool | c_y |
| bool | c_z |
| bool | c_rx |
| bool | c_ry |
| bool | c_rz |
| int | m_num_constr |
| number of constraints | |
| int | m_num_constr_bil |
| number of bilateral constraints | |
| int | m_num_constr_uni |
| number of unilateral constraints | |
| ChLinkMask | mask |
| ChConstraintVectorX | C |
| residuals | |
| ChMatrix33 | P |
| projection matrix from Lagrange multiplier to reaction torque | |
| ChVector3d | gamma_f |
| translational Lagrange multipliers | |
| ChVector3d | gamma_m |
| rotational Lagrange multipliers | |
| std::unique_ptr< ChKRMBlock > | Kmatr = nullptr |
| the tangent stiffness matrix of constraint | |
| Protected Attributes inherited from chrono::ChLink | |
| ChBodyFrame * | m_body1 |
| first connected body | |
| ChBodyFrame * | m_body2 |
| second connected body | |
| ChVector3d | react_force |
| xyz reactions, expressed in local coordinate system of link; | |
| ChVector3d | react_torque |
| torque reactions, expressed in local coordinate system of link; | |
| Protected Attributes inherited from chrono::ChLinkBase | |
| bool | disabled |
| all constraints of link disabled because of user needs | |
| bool | valid |
| link data is valid | |
| bool | broken |
| link is broken because of excessive pulling/pushing. | |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
| ChSystem * | system |
| parent system | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of Lagrange multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
Member Function Documentation
◆ ArchiveIn()
|
overridevirtual |
Method to allow deserialization of transient data from archives.
Method to allow de serialization of transient data from archives.
Reimplemented from chrono::ChLinkMotorLinear.
◆ GetNumCoordsPosLevel()
|
inlineoverridevirtual |
Get the number of coordinates at the position level.
Might differ from coordinates at velocity level if quaternions are used for rotations.
Reimplemented from chrono::ChPhysicsItem.
◆ SetAvoidPositionDrift()
|
inline |
Set if the constraint must avoid position drift.
If true, it means that the constraint is satisfied also at the position level, by integrating the velocity in a separate auxiliary state. Default, true.
◆ SetSpeedFunction()
|
inline |
Set the speed function of time v(t).
To prevent acceleration pikes, this function should be C0 continuous.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChLinkMotorLinearSpeed.h
- /builds/uwsbel/chrono/src/chrono/physics/ChLinkMotorLinearSpeed.cpp
