chrono::viper::Viper_Part Class Reference
Description
Base class definition of the Viper Rover Part.
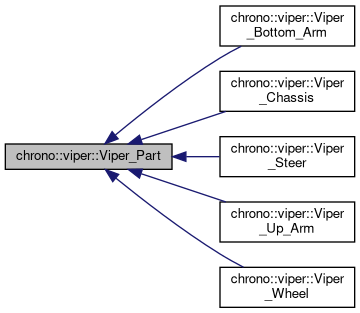
Viper Rover Parts include Chassis, Steering, Upper Suspension Arm, Bottom Suspension Arm and Wheel. This class encapsulates base fields and functions.
#include <Viper.h>
Inheritance diagram for chrono::viper::Viper_Part:
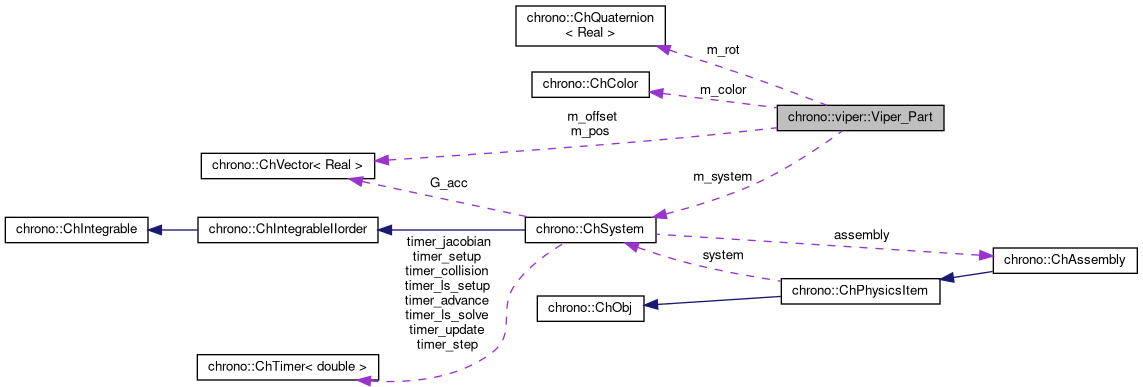
Collaboration diagram for chrono::viper::Viper_Part:
Public Member Functions | |
| Viper_Part (const std::string &name, bool fixed, std::shared_ptr< ChMaterialSurface > mat, ChSystem *system, const ChVector<> &body_pos, const ChQuaternion<> &body_rot, std::shared_ptr< ChBodyAuxRef > chassis_body, bool collide) | |
| const std::string & | GetName () const |
| Return the name of the part. | |
| void | SetName (const std::string &name) |
| Set the name of the part. | |
| std::shared_ptr< ChBodyAuxRef > | GetBody () const |
| Return the ChBody of the corresponding Viper part. | |
| std::shared_ptr< ChBodyAuxRef > | GetChassis () const |
| Return the ChBody of the chassis wrt the Viper part. | |
| const ChVector & | GetPos () const |
| Return the Position of the Viper part. | |
| const ChQuaternion & | GetRot () const |
| Return the Rotation of the Viper part. | |
Protected Member Functions | |
| void | AddVisualizationAssets () |
| Initialize the visulization mesh of the Viper part. | |
| void | AddCollisionShapes () |
| Initialize the collision mesh of the Viper part. | |
| void | SetCollide (bool state) |
| Enable/disable collision. | |
Protected Attributes | |
| std::string | m_name |
| subsystem name | |
| std::shared_ptr< ChBodyAuxRef > | m_body |
| rigid body | |
| std::shared_ptr< ChMaterialSurface > | m_mat |
| contact material (shared among all shapes) | |
| std::string | m_mesh_name |
| visualization mesh name | |
| ChVector | m_offset |
| offset for visualization mesh | |
| ChColor | m_color |
| visualization asset color | |
| ChSystem * | m_system |
| system which Viper Part belongs to | |
| std::shared_ptr< ChBodyAuxRef > | m_chassis |
| the chassis body for the rover | |
| ChVector | m_pos |
| Viper part's relative position wrt the chassis. | |
| ChQuaternion | m_rot |
| Viper part's relative rotation wrt the chassis. | |
| double | m_density |
| Viper part's density. | |
| bool | m_collide |
| Viper part's collision indicator. | |
| bool | m_fixed |
| Viper part's fixed indication. | |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_models/robot/viper/Viper.h
- /builds/uwsbel/chrono/src/chrono_models/robot/viper/Viper.cpp
