Chrono can compute and simulate collisions between collidable objects - being them bodies or finite element meshes - allowing them to interact through contacts.
The contact problem includes two different aspects:
- collision detection: finding the point pairs that are, or may come, in contact in the next future;
- contact formulation: defining the reaction forces between shapes in contact.
Contact Formulation
As described in the ChSystem manual, Chrono can setup two different kind of systems, depending on the contact method:
- ChSystemNSC implements Non Smooth Contacts (NSC):
- contacts are treated has hard/stiff constraints;
- since no artificial stiffening terms are introduced longer timesteps are allowed;
- specific VI solvers are required;
- only the more recent ChSolverADMM can handle non-smooth contacts and finite elements together;
- ChSystemSMC implements SMooth Contacts (SMC):
- contacts reaction forces are computed based on the interpenetration of the bodies, multiplied by a compliance/stiffness term (penalty approach);
- the contact stiffness is an artificial term, usually empirically related to the material stiffness;
- shorter timsteps are required, especially for harder contact stiffness;
- no VI solvers are required
Users should carefully consider which system fits better their needs, since timesteps might differ up to two or three orders of magnitude. On the contrary, the two system types are completely equivalente if no collisions are involved.
Collision Detection
In Chrono, two different collision systems are available:
- ChCollisionSystemBullet: a customized version of Bullet;
- ChCollisionSystemMulticore: an in-house multicore collision engine (enabled only if Thrust is available on the machine).
The choice between these two is made by calling ChSystem::SetCollisionSystemType on ChSystem. For example:
Each collidable object carries a set of collision shapes and materials:
- ChBody holds its collision shapes through a ChCollisionModel object;
- ChMesh holds its collision shapes through a ChContactSurface object;
For finite elements the collision objects and properties are defined through the ChContactSurface and inherited classes (e.g. ChContactSurfaceMesh and ChContactSurfaceNodeCloud) that can be set in this way:
Collision objects for the ChBody classes are discussed more in detail in the following sections.
Collision Models and Shapes
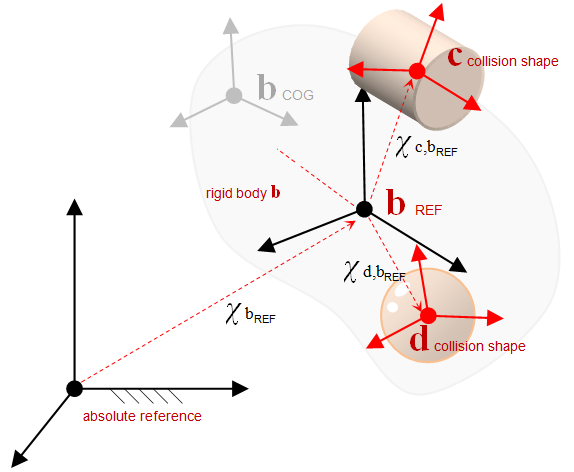
Each ChBody (as well as any other object derived from ChContactable) carries information about its collision properties through a ChCollisionModel object. The ChCollisionModel object may contain multiple ChCollisionShapes, each of which carrying a geometric shape object together with its Collision Surface Material.
Each ChBody may contain a:
- ChCollisionModel, that contains (multiple):
- ChCollisionShape, each of which containing:
A similar structure can be found also for the Visualization System.
Actually, as many other objects in Chrono, items within the ChCollisionModel are stored through pointers, so to allow to easily share them across different bodies. This is very useful especially for ChContactMaterial objects.
In order to provide a collision shape to a ChBody object:
Always remember to set a given collision system type in ChSystem e.g.
additional settings can be tuned on the collision system (see Collision Tolerances).
For the most common primitive objects, some auxiliary classes named ChBodyEasyXXXX are offered: ChBodyEasyBox, ChBodyEasyCylinder, ChBodyEasySphere, ...
These classes allow to create bodies together with their visualization and collision objects in a single command. However, please mind that, while the visualization is already added by default, the collision shape is not. To enable it the proper argument should be passed to the constructor e.g.
Please note that:
- collision shapes are defined with respect to the REF frame of the body
- collision shapes can be chosen among the many classes inherited from ChCollisionShape:
- multiple collision shapes can be added to a rigid body. However, compound shapes will slow down the collision detection phase of the simulation. In this context, there is no geometry simpler to handle than a sphere that is located at the center of mass of the rigid body.
- handling of concave shapes falls back on a decomposition of the geometry in a union of convex shapes
- collision shapes and visualization assets do not need to match; e.g. one may have a detailed visualization shape for rendering purposes, yet the collision shape being much simpler to avoid a slowdown of the simulation.
- avoid shapes that are too thin, too flat or in general that lead to extreme size ratios
- to retrieve the contact forces acting on a body: ChBody::GetContactForce() and similarly for torques;
Collision Families
You can define collision families for selective collisions. For example you may not want the object of family=2 to collide with any objects of family=4:
Currently, Chrono allows up to 15 different collision families that can be involved in a simulation.
Collision Surface Materials
The contact between shapes is influenced by various properties of the material (friction, damping, cohesion, restitution, ...). These properties are specified for each shape, by providing either a ChContactMaterialNSC or ChContactMaterialSMC object to the ChCollisionShape.
Chrono can handle two different contact formulations - Non Smooth Contacts (NSC) and SMooth Contacts (SMC) - each of which requires different surface material types as well as different ChSystem types (see ChSystem manual).
Collision Tolerances
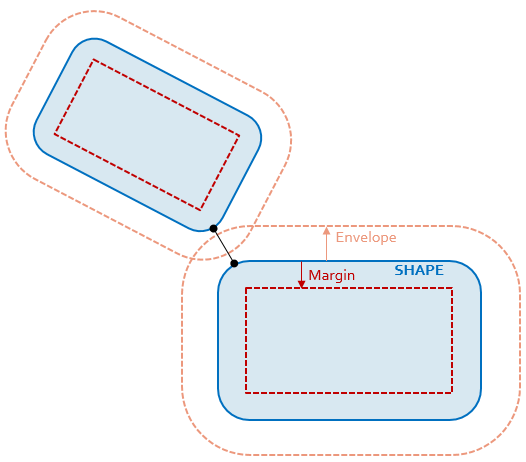
Collision shapes have two (global) tolerances used by collision engine to create and delete contacts, namely an envelope and a margin:
- the outward envelope (whose thickness is modified through ChCollisionModel::SetDefaultSuggestedEnvelope): when two collisions shapes are close to contact a constraint equation should be immediately added to ChSystem. The envelope parameter tells how close these shapes (or contact pairs) should be to trigger the creation of the constraint equation. Please notice that adding a collision constraint equation does not mean that a reaction force is already present, but only that a potential collision might happen in the early future. This allows the system to catch the potential contact with due advance, thus reducing the risk of tunneling or unstable contacts.
- if too large: too many contacts might be added too ahead of time, thus increasing the problem size (waste of memory and computational time);
- if too small: the risk of interpenetration increases and objects might even pass through others if speeds are high or objects thickness is small (tunneling effect).
- an inward margin (whose thickness is modified through ChCollisionModel::SetDefaultSuggestedMargin): shape interpenetrations are usually source of numerical issues (integration errors, approximations, ill-conditioned initial conditions, etc). While a small amount of interpenetration is usually allowed, the collision detection algorithm needs to fall back to a slower collision detection algorithm when this interpenetration gets too high. This margin represents this threshold.
- if too large: shapes appear too ''rounded'';
- if too small: the slower algorithm kicks in too soon, thus leading to poor performance.
An additional setting is available for the Bullet engine only:
- the contact breaking threshold (whose value is modified through ChCollisionSystemBullet::SetContactBreakingThreshold): Bullet keeps track of collision happened in the previous simulation frames. In order to purge the list a threshold is set: when the shapes move further away than this threshold they get removed from the list.
In order to improve the stability and performance of the collision detection, collision shapes are initially shrunk by an amount equal to the margin; they then get expanded back by the same amount thus introducing a sort of "rounding effect". In the picture below, the two blue shapes were added as sharp boxes, but after the treatment they end up having rounded corners whose rounding radius is the collision margin.
An example of usage:
Collision Callbacks
While the contact simulation is handled by Chrono in full autonomy, the user can still interact with the contact simulation through appropriate callbacks that gets automatically called by Chrono whenever a contact is found. The user is asked to create its own specific implementation of such callbacks by extending from BroadphaseCallback or NarrowphaseCallback classes, and then register an instance of this new class through the RegisterBroadphaseCallback and RegisterNarrowphaseCallback methods.
Please refer to demo_MBS_callbackNSC.cpp and demo_MBS_callbackSMC.cpp for further details.
Examples
For further guidance, see:
