Description
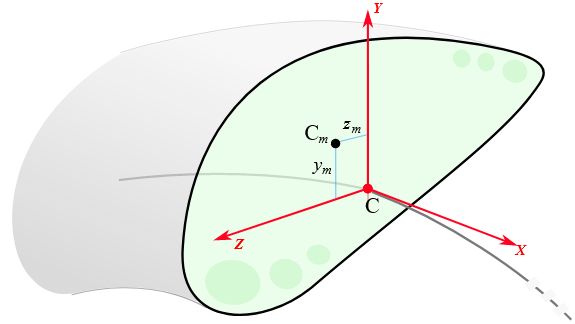
Inertia properties of a beam of Cosserat type, not necessarily of uniform density, from the following information that allows the center of mass to be offset respect to the beam centerline:
- a mass per unit length
- offset of the center of mass Cm along Y Z section axes,
- Jyy Jzz Jzy moments of inertia computed in section reference Y Z, not rotated and origin in centerline The polar moment of area is automatically inferred via perpendicular axis theorem.
#include <ChBeamSectionCosserat.h>
Public Member Functions | |
| ChInertiaCosseratAdvanced (double mu_density, double c_y, double c_z, double Jyy_moment, double Jzz_moment, double Jyz_moment) | |
| ChInertiaCosseratAdvanced (double mu_density, double c_y, double c_z, ChVector3d Ivals) | |
| virtual void | ComputeInertiaMatrix (ChMatrix66d &M) override |
| Compute the 6x6 sectional inertia matrix, as in {x_momentum,w_momentum}=[Mi]{xvel,wvel} The matrix is computed in the material reference. | |
| virtual void | ComputeInertiaDampingMatrix (ChMatrix66d &Ri, const ChVector3d &mW) override |
| Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping), as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference. More... | |
| virtual void | ComputeInertiaStiffnessMatrix (ChMatrix66d &Ki, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) override |
| Compute the 6x6 sectional inertia stiffness matrix [Ki^], as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference. More... | |
| virtual void | ComputeQuadraticTerms (ChVector3d &mF, ChVector3d &mT, const ChVector3d &mW) override |
| Compute the values of inertial force & torque depending on quadratic velocity terms, that is the gyroscopic torque w x [J]w and the centrifugal term (if center of mass is offset). More... | |
| virtual double | GetMassPerUnitLength () override |
| Get mass per unit length, ex.SI units [kg/m]. | |
| virtual void | SetMassPerUnitLength (double mmu) |
| Set mass c, ex.SI units [kg/m]. More... | |
| void | SetCenterOfMass (double my, double mz) |
| "mass reference": set the displacement of the center of mass respect to the section centerline reference. | |
| double | GetCenterOfMassY () |
| double | GetCenterOfMassZ () |
| virtual void | SetInertiasPerUnitLength (double Jyy_moment, double Jzz_moment, double Jyz_moment) |
| Set inertia moments, assumed computed in the Y Z non-rotated reference frame of the section at centerline, and defined as: \( J_{yy} = \int_\Omega \rho z^2 d\Omega \), also Jyy = Mm(4,4) \( J_{zz} = \int_\Omega \rho y^2 d\Omega \), also Jzz = Mm(5,5) \( J_{yz} = \int_\Omega \rho y z d\Omega \), also Jyz = -Mm(4,5) = -Mm(5,4) Note that for an uniform density, these are also related to second moments of area as \( J_{yy} = \rho I_{yy} \), \( J_{zz} = \rho I_{zz} \). More... | |
| virtual double | GetInertiaJxxPerUnitLength () |
| Get the Jxx component of the inertia per unit length (polar inertia), in the Y Z non-rotated reference frame of the section at centerline. More... | |
| virtual double | GetInertiaJyyPerUnitLength () |
| Get the Jyy component of the inertia per unit length, in the Y Z non-rotated reference frame of the section at centerline, also Jyy = Mm(4,4) | |
| virtual double | GetInertiaJzzPerUnitLength () |
| Get the Jzz component of the inertia per unit length, in the Y Z non-rotated reference frame of the section at centerline, also Jzz = Mm(5,5) | |
| virtual double | GetInertiaJyzPerUnitLength () |
| Get the Jyz off-diagonal component of the inertia per unit length, in the Y Z non-rotated reference frame of the section at centerline. More... | |
| virtual void | SetMainInertiasInMassReference (double Jmyy, double Jmzz, double phi) |
| Set inertia moments, per unit length, as assumed computed in the Ym Zm "mass reference" frame, ie. More... | |
| virtual void | GetMainInertiasInMassReference (double &Jmyy, double &Jmzz, double &phi) |
| Get inertia moments, per unit length, as assumed computed in the Ym Zm "mass reference" frame, and the rotation phi of that frame, ie. More... | |
 Public Member Functions inherited from chrono::fea::ChInertiaCosserat Public Member Functions inherited from chrono::fea::ChInertiaCosserat | |
| virtual void | ComputeInertialForce (ChVector3d &mFi, ChVector3d &mTi, const ChVector3d &mWvel, const ChVector3d &mWacc, const ChVector3d &mXacc) |
| Compute the total inertial wrench, ie forces and torques (per unit length). More... | |
Additional Inherited Members | |
| Public Attributes inherited from chrono::fea::ChInertiaCosserat | |
| ChBeamSectionCosserat * | section |
| bool | compute_inertia_damping_matrix = true |
| Flag that turns on/off the computation of the [Ri] 'gyroscopic' inertial damping matrix. More... | |
| bool | compute_inertia_stiffness_matrix = true |
| Flag that turns on/off the computation of the [Ki] inertial stiffness matrix. More... | |
| bool | compute_Ri_Ki_by_num_diff = false |
| Flag for computing the Ri and Ki matrices via numerical differentiation even if an analytical expression is provided. More... | |
Constructor & Destructor Documentation
◆ ChInertiaCosseratAdvanced() [1/2]
|
inline |
- Parameters
-
mu_density mass per unit length [kg/m] c_y displacement of center of mass along Y c_z displacement of center of mass along Z Jyy_moment moment of inertia per unit length, about Y. Jyy=Mm(4,4) Jzz_moment moment of inertia per unit length, about Z. Jzz=Mm(5,5) Jyz_moment moment of inertia per unit length, about YZ (off diagonal term). Jyz=-Mm(4,5)=-Mm(5,4)
◆ ChInertiaCosseratAdvanced() [2/2]
|
inline |
- Parameters
-
mu_density mass per unit length [kg/m] c_y displacement of center of mass along Y c_z displacement of center of mass along Z Ivals moments of inertia
Member Function Documentation
◆ ComputeInertiaDampingMatrix()
|
overridevirtual |
Compute the 6x6 sectional inertia damping matrix [Ri] (gyroscopic matrix damping), as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference.
- Parameters
-
Ri 6x6 sectional inertial-damping (gyroscopic damping) matrix values here mW current angular velocity of section, in material frame
Reimplemented from chrono::fea::ChInertiaCosserat.
◆ ComputeInertiaStiffnessMatrix()
|
overridevirtual |
Compute the 6x6 sectional inertia stiffness matrix [Ki^], as in linearization dFi=[Mi]*d{xacc,wacc}+[Ri]*d{xvel,wvel}+[Ki]*d{pos,rot} The matrix is computed in the material reference.
NOTE the matrix already contains the 'geometric' stiffness, so it transforms to absolute transl/local rot just like [Mi] and [Ri]: [Ki]_al =[R,0;0,I]*[Ki^]*[R',0;0,I'] , with [Ki^]=([Ki]+[0,f~';0,0]) for f=current force part of inertial forces.
- Parameters
-
Ki 6x6 sectional inertial-stiffness matrix [Ki^] values here mWvel current angular velocity of section, in material frame mWacc current angular acceleration of section, in material frame mXacc current acceleration of section, in material frame (not absolute!)
Reimplemented from chrono::fea::ChInertiaCosserat.
◆ ComputeQuadraticTerms()
|
overridevirtual |
Compute the values of inertial force & torque depending on quadratic velocity terms, that is the gyroscopic torque w x [J]w and the centrifugal term (if center of mass is offset).
All terms expressed in the material reference, ie. the reference in the centerline of the section.
- Parameters
-
mF centrifugal term (if any) returned here mT gyroscopic term returned here mW current angular velocity of section, in material frame
Implements chrono::fea::ChInertiaCosserat.
◆ GetInertiaJxxPerUnitLength()
|
inlinevirtual |
Get the Jxx component of the inertia per unit length (polar inertia), in the Y Z non-rotated reference frame of the section at centerline.
Note: it automatically follows Jxx=Jyy+Jzz for the polar theorem.
◆ GetInertiaJyzPerUnitLength()
|
inlinevirtual |
Get the Jyz off-diagonal component of the inertia per unit length, in the Y Z non-rotated reference frame of the section at centerline.
Also Jyz = -Mm(4,5) = -Mm(5,4)
◆ GetMainInertiasInMassReference()
|
virtual |
Get inertia moments, per unit length, as assumed computed in the Ym Zm "mass reference" frame, and the rotation phi of that frame, ie.
inertias centered at the center of mass and rotated by phi angle to match the main axes of inertia: \( Jm_{yy} = \int_\Omega \rho z_{m}^2 d\Omega \), \( Jm_{zz} = \int_\Omega \rho y_{m}^2 d\Omega \). Assuming the center of mass is already set.
Reimplemented in chrono::fea::ChInertiaCosseratMassref.
◆ SetInertiasPerUnitLength()
|
virtual |
Set inertia moments, assumed computed in the Y Z non-rotated reference frame of the section at centerline, and defined as: \( J_{yy} = \int_\Omega \rho z^2 d\Omega \), also Jyy = Mm(4,4) \( J_{zz} = \int_\Omega \rho y^2 d\Omega \), also Jzz = Mm(5,5) \( J_{yz} = \int_\Omega \rho y z d\Omega \), also Jyz = -Mm(4,5) = -Mm(5,4) Note that for an uniform density, these are also related to second moments of area as \( J_{yy} = \rho I_{yy} \), \( J_{zz} = \rho I_{zz} \).
Note also that \( J_{xy} = J_{xz} = J_{yx} = J_{zx} = 0 \) anyway. Note also that \( J_{xy} \) does not need to be input, as automatically computed via \( J_{xx} = J_{yy} +J_{zz} \) for the polar theorem.
Reimplemented in chrono::fea::ChInertiaCosseratMassref.
◆ SetMainInertiasInMassReference()
|
virtual |
Set inertia moments, per unit length, as assumed computed in the Ym Zm "mass reference" frame, ie.
centered at the center of mass and rotated by phi angle to match the main axes of inertia: \( Jm_{yy} = \int_\Omega \rho z_{m}^2 d\Omega \), \( Jm_{zz} = \int_\Omega \rho y_{m}^2 d\Omega \). Assuming the center of mass is already set.
Reimplemented in chrono::fea::ChInertiaCosseratMassref.
◆ SetMassPerUnitLength()
|
inlinevirtual |
Set mass c, ex.SI units [kg/m].
Note that for uniform volumetric density \( \rho \), and area \( A \), this is also \( \mu = \rho A \).
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionCosserat.h
- /builds/uwsbel/chrono/src/chrono/fea/ChBeamSectionCosserat.cpp
