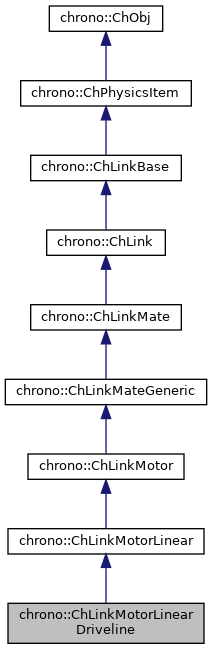
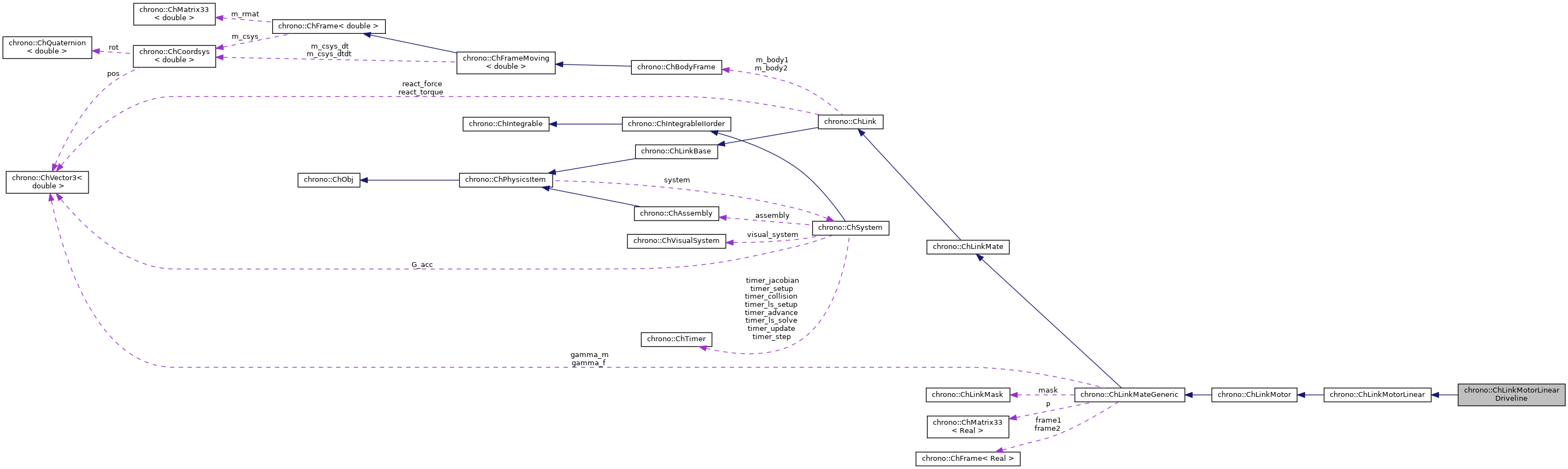
Description
Couples the relative translation of two bodies (along Z direction of the link frames) with the rotation of a 1D shaft.
This link adds three additional ChShaft objects:
- two of them on Body 2, representing a rotational (Shaft2Rot) and a translational (Shfat2Lin) inertia.
- one ChShaft object to Body 1, representing a translational inertia (Shaft1Lin). Each translational shaft is connected to the Z degree of freedom of its body (through a ChShaftBodyTranslation). The rotational shaft is connected to Body 2 (through a ChShaftBodyRotation) along a direction (default: Z axis) that can be later set through SetInnerShaft2RotDirection(). Any action applied to the shafts is then reflected back to the respective bodies along their given directions.
[************ ChLinkMotorLinearDriveline ********] [ Body2 ]----[----(ChShaftBodyRotation)-------[Shaft2Rot]----]----> [ Body2 ]----[----(ChShaftBodyTranslation)----[Shaft2Lin]----]----> [ Body1 ]----[----(ChShaftBodyTranslation)----[Shaft1Lin]----]---->
Typical usage is to model a linear actuator between two 3D bodies by taking into account also the actuator driveline (e.g. inertia, friction, ...).[************ ChLinkMotorLinearDriveline ********] [ Body2 ]----[----(ChShaftBodyRotation)-------[Shaft2Rot]----]---> [ Body2 ]----[----(ChShaftBodyTranslation)----[Shaft2Lin]----]---> [ Body1 ]----[----(ChShaftBodyTranslation)----[Shaft1Lin]----]---> [***** ChShaftsPlanetary *****] >-[ChShaftsMotor]----[ChShaft] -----[----[shaft2] ] >-----------------------------------[----[shaft1] ] >-----------------------------------[----[shaft3] ]
#include <ChLinkMotorLinearDriveline.h>
Public Member Functions | |
| ChLinkMotorLinearDriveline (const ChLinkMotorLinearDriveline &other) | |
| virtual ChLinkMotorLinearDriveline * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| virtual void | SetSystem (ChSystem *m_system) override |
| Set the pointer to the parent ChSystem(). More... | |
| std::shared_ptr< ChShaft > | GetInnerShaft1Lin () const |
| Access the inner 1D shaft connected to the translation of body 1 about dir of linear guide. More... | |
| std::shared_ptr< ChShaft > | GetInnerShaft2Lin () const |
| Access the inner 1D shaft connected to the translation of body 2 about dir of linear guide. More... | |
| std::shared_ptr< ChShaft > | GetInnerShaft2Rot () const |
| Access the inner 1D shaft connected to the rotation of body 2 about dir of linear guide. More... | |
| void | SetInnerShaft2RotDirection (ChVector3d md) |
| Set the direction of the inner rotation axis for body 2, expressed in link coordinates Default is VECT_Z, same dir of guide, i.e. More... | |
| ChVector3d | GetInnerShaft2RotDirection () const |
| Get the direction of the inner rotation axis for body 2, expressed in link coordinates Default is VECT_Z, same dir of guide, i.e. More... | |
| double | GetInnerForce1 () const |
| Get the force between body 1 and inner shaft 1 Note: coincident with GetMotorForce() of this motor. | |
| double | GetInnerForce2 () const |
| Get the force between body 2 and inner translational shaft 2. | |
| double | GetInnerTorque2 () const |
| Get the torque between body 2 and inner rotational shaft 2 (ex. More... | |
| virtual double | GetMotorForce () const override |
| Get the current actuator reaction torque [Nm]. | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > mbody1, std::shared_ptr< ChBodyFrame > mbody2, ChFrame<> mabsframe) override |
| Initialize the generic mate, given the two bodies to be connected, and the absolute position of the mate (the two frames to connect on the bodies will be initially coincindent to that frame). More... | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > mbody1, std::shared_ptr< ChBodyFrame > mbody2, bool pos_are_relative, ChFrame<> mframe1, ChFrame<> mframe2) override |
| Specialized initialization for LinkMotorLinearDriveline, given the two bodies to be connected, the positions of the two frames to connect on the bodies (each expressed in body or abs. More... | |
| virtual void | Initialize (std::shared_ptr< ChBodyFrame > mbody1, std::shared_ptr< ChBodyFrame > mbody2, bool pos_are_relative, const ChVector3d &mpt1, const ChVector3d &mpt2, const ChVector3d &mnorm1, const ChVector3d &mnorm2) override |
| Specialized initialization for LinkMotorLinearDriveline based on passing two vectors (point + dir) on the two bodies, which will represent the Z axes of the two frames (X and Y will be built from the Z vector via Gram Schmidt orthonormalization). More... | |
| virtual void | Setup () override |
| Compute offsets of sub-objects, offsetting all the contained sub objects (the inner shafts) | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. More... | |
 Public Member Functions inherited from chrono::ChLinkMotorLinear Public Member Functions inherited from chrono::ChLinkMotorLinear | |
| ChLinkMotorLinear (const ChLinkMotorLinear &other) | |
| void | SetGuideConstraint (const GuideConstraint mconstraint) |
| "Virtual" copy constructor (covariant return type). More... | |
| void | SetGuideConstraint (bool mc_x, bool mc_y, bool mc_rx, bool mc_ry, bool mc_rz) |
| Sets which movements (of frame 1 respect to frame 2) are constrained. More... | |
| virtual double | GetMotorPos () const |
| Get the current actuator displacement. | |
| virtual double | GetMotorPosDt () const |
| Get the current actuator velocity. | |
| virtual double | GetMotorPosDt2 () const |
| Get the current actuator acceleration. | |
| Public Member Functions inherited from chrono::ChLinkMotor | |
| ChLinkMotor (const ChLinkMotor &other) | |
| void | SetMotorFunction (const std::shared_ptr< ChFunction > function) |
| Set the actuation function of time F(t). More... | |
| std::shared_ptr< ChFunction > | GetMotorFunction () const |
| Get the actuation function F(t). | |
| Public Member Functions inherited from chrono::ChLinkMateGeneric | |
| ChLinkMateGeneric (bool mc_x=true, bool mc_y=true, bool mc_z=true, bool mc_rx=true, bool mc_ry=true, bool mc_rz=true) | |
| ChLinkMateGeneric (const ChLinkMateGeneric &other) | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const override |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| virtual ChFramed | GetFrame1Rel () const override |
| Get the link frame 1, relative to body 1. | |
| virtual ChFramed | GetFrame2Rel () const override |
| Get the link frame 2, relative to body 2. | |
| bool | IsConstrainedX () const |
| bool | IsConstrainedY () const |
| bool | IsConstrainedZ () const |
| bool | IsConstrainedRx () const |
| bool | IsConstrainedRy () const |
| bool | IsConstrainedRz () const |
| void | SetConstrainedCoords (bool mc_x, bool mc_y, bool mc_z, bool mc_rx, bool mc_ry, bool mc_rz) |
| Sets which movements (of frame 1 respect to frame 2) are constrained. | |
| virtual void | SetDisabled (bool mdis) override |
| Enable/disable all the constraint of the link as desired. | |
| virtual void | SetBroken (bool mon) override |
| Set this link as 'broken'. | |
| void | SetUseTangentStiffness (bool useKc) |
| Enable/disable calculation of the tangent stiffness matrix (Kc) of this constraint (default: false). | |
| virtual unsigned int | GetNumConstraintsUnilateral () override |
| Get the number of unilateral scalar constraints. | |
| virtual ChVectorDynamic | GetConstraintViolation () const override |
| Link violation (residuals of the link constraint equations). | |
| Public Member Functions inherited from chrono::ChLinkMate | |
| ChLinkMate (const ChLinkMate &other) | |
| Public Member Functions inherited from chrono::ChLink | |
| ChLink (const ChLink &other) | |
| virtual unsigned int | GetNumAffectedCoords () override |
| Get the number of scalar variables affected by constraints in this link. | |
| ChBodyFrame * | GetBody1 () const |
| Get the constrained body 1. | |
| ChBodyFrame * | GetBody2 () const |
| Get the constrained body 2. | |
| virtual ChFramed | GetFrame1Abs () const override |
| Get the link frame 1, on body 1, expressed in the absolute frame. | |
| virtual ChFramed | GetFrame2Abs () const override |
| Get the link frame 2, on body 2, expressed in the absolute frame. | |
| virtual ChWrenchd | GetReaction1 () const override |
| Get the reaction force and torque on the 1st body, expressed in the link frame 1. | |
| virtual ChWrenchd | GetReaction2 () const override |
| Get the reaction force and torque on the 2nd body object, expressed in the link frame 2. | |
| virtual void | UpdateTime (double mytime) |
| Given new time, current body state, update time-dependent quantities in link state, for example motion laws, moving markers, etc. More... | |
| virtual void | Update (bool update_assets=true) override |
| As above, but with current time. | |
| virtual void | UpdatedExternalTime (double prevtime, double time) |
| Called from a external package (i.e. a plugin, a CAD app.) to report that time has changed. | |
| Public Member Functions inherited from chrono::ChLinkBase | |
| ChLinkBase (const ChLinkBase &other) | |
| bool | IsValid () |
| Tells if the link data is currently valid. More... | |
| void | SetValid (bool mon) |
| Set the status of link validity. | |
| bool | IsDisabled () |
| Tells if all constraints of this link are currently turned on or off by the user. | |
| bool | IsBroken () |
| Tells if the link is broken, for excess of pulling/pushing. | |
| virtual bool | IsActive () const override |
| Return true if the link is currently active and thereofre included into the system solver. More... | |
| virtual bool | IsRequiringWaking () |
| Tells if this link requires that the connected ChBody objects must be waken if they are sleeping. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem(). | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| void | AddVisualShapeFEA (std::shared_ptr< ChVisualShapeFEA > shapeFEA) |
| Add the specified FEA visualization object to the visualization model. More... | |
| std::shared_ptr< ChVisualShapeFEA > | GetVisualShapeFEA (unsigned int i) const |
| Access the specified FEA visualization object in the visualization model (if any). More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this physics item. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a ChCamera to this physical item. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this physics item. | |
| virtual bool | IsCollisionEnabled () const |
| Tell if the object is subject to collision. More... | |
| virtual void | AddCollisionModelsToSystem (ChCollisionSystem *coll_sys) const |
| Add to the provided collision system any collision models managed by this physics item. More... | |
| virtual void | RemoveCollisionModelsFromSystem (ChCollisionSystem *coll_sys) const |
| Remove from the provided collision system any collision models managed by this physics item. More... | |
| virtual void | SyncCollisionModels () |
| Synchronize the position and bounding box of any collsion models managed by this physics item. | |
| virtual ChAABB | GetTotalAABB () |
| Get the entire AABB axis-aligned bounding box of the object. More... | |
| virtual void | GetCenter (ChVector3d &mcenter) |
| Get a symbolic 'center' of the object. More... | |
| virtual void | ForceToRest () |
| Set zero speed (and zero accelerations) in state, without changing the position. More... | |
| virtual unsigned int | GetNumCoordsVelLevel () |
| Get the number of coordinates at the velocity level. More... | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the lagrangian multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the lagrangian multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| virtual std::string & | ArchiveContainerName () |
Additional Inherited Members | |
| Public Types inherited from chrono::ChLinkMotorLinear | |
| enum | GuideConstraint { FREE, PRISMATIC, SPHERICAL } |
| Type of guide constraint. | |
| Public Types inherited from chrono::ChLinkMateGeneric | |
| using | ChConstraintVectorX = Eigen::Matrix< double, Eigen::Dynamic, 1, Eigen::ColMajor, 6, 1 > |
| Protected Member Functions inherited from chrono::ChLinkMateGeneric | |
| void | SetupLinkMask () |
| void | ChangedLinkMask () |
| virtual void | InjectKRMMatrices (ChSystemDescriptor &descriptor) override |
| Register with the given system descriptor any ChKRMBlock objects associated with this item. | |
| virtual void | LoadKRMMatrices (double Kfactor, double Rfactor, double Mfactor) override |
| Add the current stiffness K matrix in encapsulated ChKRMBlock item(s), if any. More... | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChLinkMotorLinear | |
| double | mpos |
| double | mpos_dt |
| double | mpos_dtdt |
| int | m_actuated_idx |
| row index of the actuated constraint (Z axis) | |
| Protected Attributes inherited from chrono::ChLinkMotor | |
| std::shared_ptr< ChFunction > | m_func |
| Protected Attributes inherited from chrono::ChLinkMateGeneric | |
| ChFrame | frame1 |
| ChFrame | frame2 |
| bool | c_x |
| bool | c_y |
| bool | c_z |
| bool | c_rx |
| bool | c_ry |
| bool | c_rz |
| int | m_num_constr |
| number of constraints | |
| int | m_num_constr_bil |
| number of bilateral constraints | |
| int | m_num_constr_uni |
| number of unilateral constraints | |
| ChLinkMask | mask |
| ChConstraintVectorX | C |
| residuals | |
| ChMatrix33 | P |
| projection matrix from Lagrange multiplier to reaction torque | |
| ChVector3d | gamma_f |
| translational Lagrange multipliers | |
| ChVector3d | gamma_m |
| rotational Lagrange multipliers | |
| std::unique_ptr< ChKRMBlock > | Kmatr = nullptr |
| the tangent stiffness matrix of constraint | |
| Protected Attributes inherited from chrono::ChLink | |
| ChBodyFrame * | m_body1 |
| first connected body | |
| ChBodyFrame * | m_body2 |
| second connected body | |
| ChVector3d | react_force |
| xyz reactions, expressed in local coordinate system of link; | |
| ChVector3d | react_torque |
| torque reactions, expressed in local coordinate system of link; | |
| Protected Attributes inherited from chrono::ChLinkBase | |
| bool | disabled |
| all constraints of link disabled because of user needs | |
| bool | valid |
| link data is valid | |
| bool | broken |
| link is broken because of excessive pulling/pushing. | |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
| ChSystem * | system |
| parent system | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of lagrangian multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
Member Function Documentation
◆ ArchiveIn()
|
overridevirtual |
Method to allow deserialization of transient data from archives.
Method to allow de serialization of transient data from archives.
Reimplemented from chrono::ChLinkMotorLinear.
◆ GetInnerShaft1Lin()
|
inline |
Access the inner 1D shaft connected to the translation of body 1 about dir of linear guide.
The shaft can be connected to other shafts with ChShaftsMotor or similar items.
◆ GetInnerShaft2Lin()
|
inline |
Access the inner 1D shaft connected to the translation of body 2 about dir of linear guide.
The shaft can be connected to other shafts with ChShaftsMotor or similar items.
◆ GetInnerShaft2Rot()
|
inline |
Access the inner 1D shaft connected to the rotation of body 2 about dir of linear guide.
This is needed because one might need to design a driveline with rotational 1D components such as ChShaftsMotor, that require an anchoring to a rotational shaft. The shaft can be connected to other shafts with ChShaftsMotor or similar items.
◆ GetInnerShaft2RotDirection()
|
inline |
Get the direction of the inner rotation axis for body 2, expressed in link coordinates Default is VECT_Z, same dir of guide, i.e.
useful when anchoring drives with screw transmission.
◆ GetInnerTorque2()
|
inline |
Get the torque between body 2 and inner rotational shaft 2 (ex.
might be caused by the inertia reaction of an internal rotation motor that is accelerating)
◆ Initialize() [1/3]
|
overridevirtual |
Specialized initialization for LinkMotorLinearDriveline, given the two bodies to be connected, the positions of the two frames to connect on the bodies (each expressed in body or abs.
coordinates).
- Parameters
-
mbody1 first body to link mbody2 second body to link pos_are_relative true: following pos. are relative to bodies mframe1 slave frame 1 (rel. or abs.) mframe2 master frame 2 (rel. or abs.)
Reimplemented from chrono::ChLinkMateGeneric.
◆ Initialize() [2/3]
|
overridevirtual |
Specialized initialization for LinkMotorLinearDriveline based on passing two vectors (point + dir) on the two bodies, which will represent the Z axes of the two frames (X and Y will be built from the Z vector via Gram Schmidt orthonormalization).
- Parameters
-
mbody1 first body to link mbody2 second body to link pos_are_relative true: following pos. are relative to bodies mpt1 origin of slave frame 1 (rel. or abs.) mpt2 origin of master frame 2 (rel. or abs.) mnorm1 X axis of slave plane 1 (rel. or abs.) mnorm2 X axis of master plane 2 (rel. or abs.)
Reimplemented from chrono::ChLinkMateGeneric.
◆ Initialize() [3/3]
|
overridevirtual |
Initialize the generic mate, given the two bodies to be connected, and the absolute position of the mate (the two frames to connect on the bodies will be initially coincindent to that frame).
- Parameters
-
mbody1 first body to link mbody2 second body to link mabsframe mate frame, in abs. coordinate
Reimplemented from chrono::ChLinkMateGeneric.
◆ SetInnerShaft2RotDirection()
|
inline |
Set the direction of the inner rotation axis for body 2, expressed in link coordinates Default is VECT_Z, same dir of guide, i.e.
useful when anchoring drives with screw transmission.
◆ SetSystem()
|
inlineoverridevirtual |
Set the pointer to the parent ChSystem().
Also add to new collision system / remove from old collision system.
Reimplemented from chrono::ChPhysicsItem.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChLinkMotorLinearDriveline.h
- /builds/uwsbel/chrono/src/chrono/physics/ChLinkMotorLinearDriveline.cpp
