Description
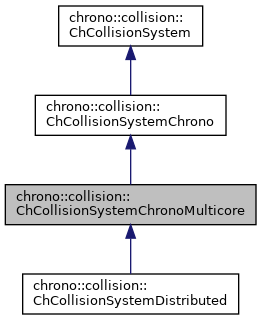
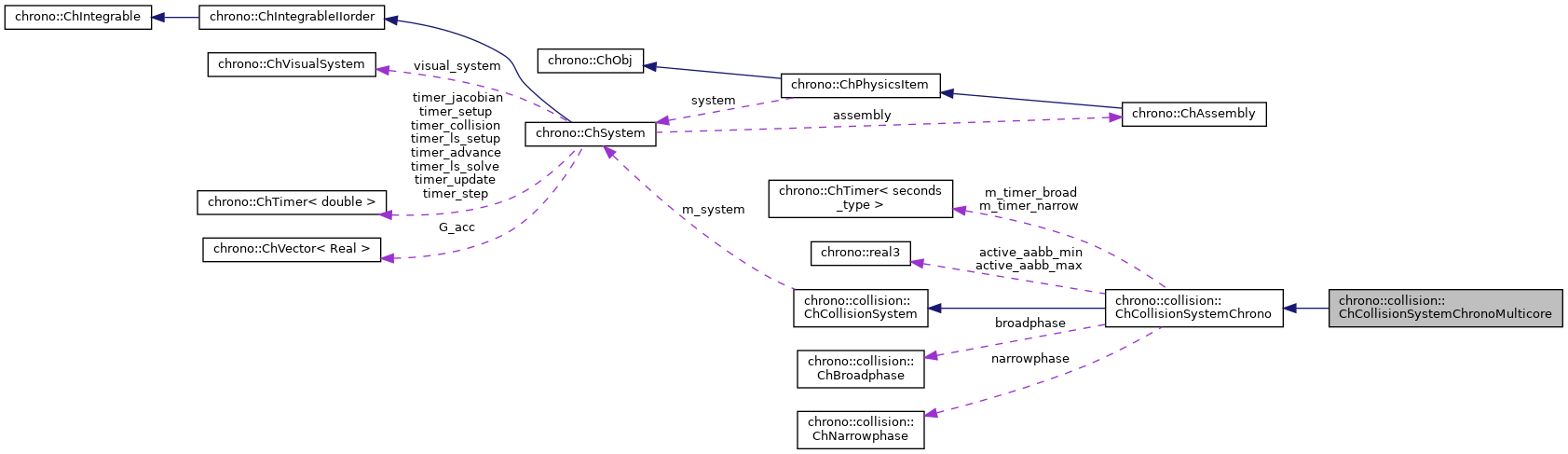
Chrono custom multicore collision system.
Contains both the broadphase and the narrow phase methods.
#include <ChCollisionSystemChronoMulticore.h>
Public Member Functions | |
| ChCollisionSystemChronoMulticore (ChMulticoreDataManager *dc) | |
| virtual void | SetNumThreads (int nthreads) override |
| Set the number of OpenMP threads for collision detection. | |
| virtual void | PreProcess () override |
| Synchronization operations, invoked before running the collision detection. More... | |
| virtual void | PostProcess () override |
| Synchronization operations, invoked after running the collision detection. | |
| virtual void | ReportContacts (ChContactContainer *container) override |
| Fill in the provided contact container with collision information after Run(). More... | |
| virtual void | ReportProximities (ChProximityContainer *mproximitycontainer) override |
| Fill in the provided proximity container with near point information after Run(). More... | |
 Public Member Functions inherited from chrono::collision::ChCollisionSystemChrono Public Member Functions inherited from chrono::collision::ChCollisionSystemChrono | |
| virtual ChCollisionSystemType | GetType () const override |
| Return the type of this collision system. | |
| void | SetEnvelope (double envelope) |
| Set collision envelope for rigid shapes (default: ChCollisionModel::GetDefaultSuggestedEnvelope). More... | |
| void | SetBroadphaseGridResolution (const ChVector< int > &num_bins) |
| Set a fixed number of grid bins (default 10x10x10). More... | |
| void | SetBroadphaseGridSize (const ChVector<> &bin_size) |
| Set a variable number of grids, such that each bin has roughly the specified size. More... | |
| void | SetBroadphaseGridDensity (double density) |
Set a variable number of grid bins, such that there are roughly density collision shapes per bin. More... | |
| void | SetNarrowphaseAlgorithm (ChNarrowphase::Algorithm algorithm) |
| Set the narrowphase algorithm (default: ChNarrowphase::Algorithm::HYBRID). More... | |
| void | EnableActiveBoundingBox (const ChVector<> &aabb_min, const ChVector<> &aabb_max) |
| Enable monitoring of shapes outside active bounding box (default: false). More... | |
| bool | GetActiveBoundingBox (ChVector<> &aabb_min, ChVector<> &aabb_max) const |
| Get the dimensions of the "active" box. More... | |
| virtual void | Clear (void) override |
| Clear all data instanced by this algorithm if any (like persistent contact manifolds). | |
| virtual void | Add (ChCollisionModel *model) override |
| Add a collision model to the collision engine. | |
| virtual void | Remove (ChCollisionModel *model) override |
| Remove a collision model from the collision engine. More... | |
| virtual void | Run () override |
| Run the algorithm and finds all the contacts. | |
| virtual void | GetBoundingBox (ChVector<> &aabb_min, ChVector<> &aabb_max) const override |
| Return an AABB bounding all collision shapes in the system. | |
| virtual void | ResetTimers () override |
| Reset any timers associated with collision detection. | |
| virtual double | GetTimerCollisionBroad () const override |
| Return the time (in seconds) for broadphase collision detection. | |
| virtual double | GetTimerCollisionNarrow () const override |
| Return the time (in seconds) for narrowphase collision detection. | |
| virtual bool | RayHit (const ChVector<> &from, const ChVector<> &to, ChRayhitResult &result) const override |
| Perform a ray-hit test with all collision models. More... | |
| virtual bool | RayHit (const ChVector<> &from, const ChVector<> &to, ChCollisionModel *model, ChRayhitResult &result) const override |
| Perform a ray-hit test with the specified collision model. More... | |
| virtual void | Visualize (int flags) override |
| Method to trigger debug visualization of collision shapes. More... | |
| virtual std::vector< vec2 > | GetOverlappingPairs () |
| Return the pairs of IDs for overlapping contact shapes. | |
| Public Member Functions inherited from chrono::collision::ChCollisionSystem | |
| void | RegisterBroadphaseCallback (std::shared_ptr< BroadphaseCallback > callback) |
| Specify a callback object to be used each time a pair of 'near enough' collision shapes is found by the broad-phase collision step. More... | |
| void | RegisterNarrowphaseCallback (std::shared_ptr< NarrowphaseCallback > callback) |
| Specify a callback object to be used each time a collision pair is found during the narrow-phase collision detection step. More... | |
| virtual void | RegisterVisualizationCallback (std::shared_ptr< VisualizationCallback > callback) |
| Specify a callback object to be used for debug rendering of collision shapes. | |
| virtual void | ArchiveOUT (ChArchiveOut &marchive) |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIN (ChArchiveIn &marchive) |
| Method to allow de-serialization of transient data from archives. | |
| void | SetSystem (ChSystem *sys) |
| Set associated Chrono system. | |
Friends | |
| class | chrono::ChSystemMulticore |
Additional Inherited Members | |
| Public Types inherited from chrono::collision::ChCollisionSystem | |
| enum | VisualizationModes { VIS_None = 0, VIS_Shapes = 1 << 0, VIS_Aabb = 1 << 1, VIS_Contacts = 1 << 2, VIS_MAX_MODES } |
| Enumeration of supported flags for collision debug visualization. More... | |
| Protected Member Functions inherited from chrono::collision::ChCollisionSystemChrono | |
| virtual void | GetOverlappingAABB (std::vector< char > &active_id, real3 Amin, real3 Amax) |
| Mark bodies whose AABB is contained within the specified box. | |
| void | GenerateAABB () |
| Generate the current axis-aligned bounding boxes of collision shapes. | |
| void | VisualizeShapes () |
| Visualize collision shapes (wireframe). | |
| void | VisualizeAABB () |
| Visualize collision shape AABBs. | |
| void | VisualizeContacts () |
| Visualize contact points and normals. | |
| Protected Attributes inherited from chrono::collision::ChCollisionSystemChrono | |
| std::shared_ptr< ChCollisionData > | cd_data |
| collision::ChBroadphase | broadphase |
| methods for broad-phase collision detection | |
| collision::ChNarrowphase | narrowphase |
| methods for narrow-phase collision detection | |
| std::vector< char > | body_active |
| bool | use_aabb_active |
| enable freezing of objects outside the active bounding box | |
| real3 | active_aabb_min |
| lower corner of active bounding box | |
| real3 | active_aabb_max |
| upper corner of active bounding box | |
| ChTimer | m_timer_broad |
| ChTimer | m_timer_narrow |
| Protected Attributes inherited from chrono::collision::ChCollisionSystem | |
| ChSystem * | m_system |
| associated Chrono system | |
| std::shared_ptr< BroadphaseCallback > | broad_callback |
| user callback for each near-enough pair of shapes | |
| std::shared_ptr< NarrowphaseCallback > | narrow_callback |
| user callback for each collision pair | |
| std::shared_ptr< VisualizationCallback > | vis_callback |
| user callback for debug visualization | |
| int | m_vis_flags |
Member Function Documentation
◆ PreProcess()
|
overridevirtual |
Synchronization operations, invoked before running the collision detection.
Different from the base class function, this overrides points to already allocated contactable state information (in the Chrono::Multicore data manager).
Reimplemented from chrono::collision::ChCollisionSystemChrono.
◆ ReportContacts()
|
overridevirtual |
Fill in the provided contact container with collision information after Run().
Different from the base class function, this override loads into a ChContactContainerMulticore.
Reimplemented from chrono::collision::ChCollisionSystemChrono.
◆ ReportProximities()
|
inlineoverridevirtual |
Fill in the provided proximity container with near point information after Run().
Not used.
Reimplemented from chrono::collision::ChCollisionSystemChrono.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_multicore/collision/ChCollisionSystemChronoMulticore.h
- /builds/uwsbel/chrono/src/chrono_multicore/collision/ChCollisionSystemChronoMulticore.cpp
