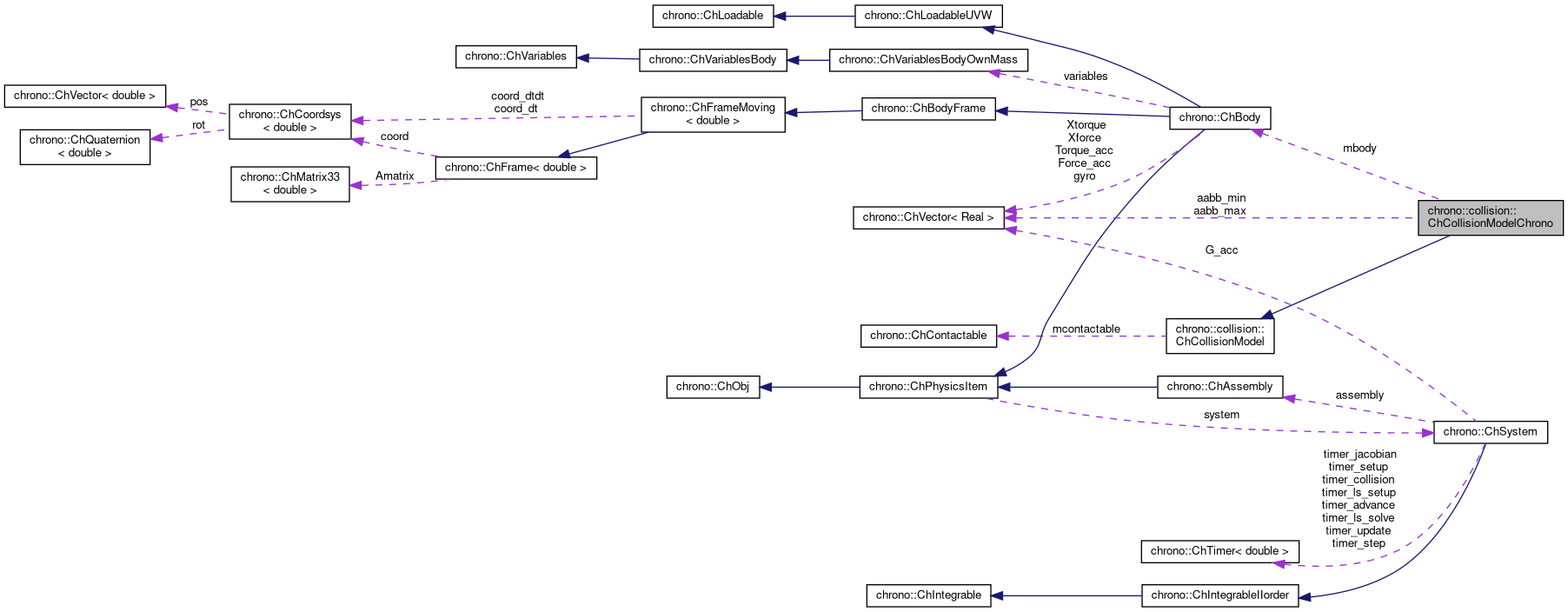
Description
Geometric model for the custom multicore Chrono collision system.
#include <ChCollisionModelChrono.h>
Public Member Functions | |
| virtual ChCollisionSystemType | GetType () const override |
| Return the type of this collision model. | |
| virtual int | ClearModel () override |
| Deletes all inserted geometries. More... | |
| virtual int | BuildModel () override |
| Builds the BV hierarchy. More... | |
| virtual void | SyncPosition () override |
| Sets the position and orientation of the collision model as the rigid body current position. | |
| virtual void | SetContactable (ChContactable *mc) override |
| Sets the pointer to the contactable object. | |
| virtual bool | AddSphere (std::shared_ptr< ChMaterialSurface > material, double radius, const ChVector<> &pos=ChVector<>()) override |
| Add a sphere shape to this collision model. More... | |
| virtual bool | AddEllipsoid (std::shared_ptr< ChMaterialSurface > material, double rx, double ry, double rz, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add an ellipsoid shape to this collision model. More... | |
| virtual bool | AddBox (std::shared_ptr< ChMaterialSurface > material, double hx, double hy, double hz, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a box shape to this collision model. More... | |
| virtual bool | AddRoundedBox (std::shared_ptr< ChMaterialSurface > material, double hx, double hy, double hz, double sphere_r, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a rounded box shape to this collision model. More... | |
| virtual bool | AddTriangle (std::shared_ptr< ChMaterialSurface > material, ChVector<> A, ChVector<> B, ChVector<> C, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) |
| Add a triangle shape to this model, for collision purposes. More... | |
| virtual bool | AddCylinder (std::shared_ptr< ChMaterialSurface > material, double rx, double rz, double hy, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a cylinder to this collision model (default axis on Y direction). More... | |
| virtual bool | AddCylindricalShell (std::shared_ptr< ChMaterialSurface > material, double radius, double hlen, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a cylindrical shell to this collision model (default axis in Y direction). More... | |
| virtual bool | AddRoundedCylinder (std::shared_ptr< ChMaterialSurface > material, double rx, double rz, double hy, double sphere_r, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a rounded cylinder to this collision model (default axis on Y direction). More... | |
| virtual bool | AddCone (std::shared_ptr< ChMaterialSurface > material, double rx, double rz, double hy, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a cone to this collision model (default axis on Y direction). More... | |
| virtual bool | AddRoundedCone (std::shared_ptr< ChMaterialSurface > material, double rx, double rz, double hy, double sphere_r, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a rounded cone to this collision model (default axis on Y direction). More... | |
| virtual bool | AddCapsule (std::shared_ptr< ChMaterialSurface > material, double radius, double hlen, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a capsule to this collision model (default axis in Y direction). More... | |
| virtual bool | AddConvexHull (std::shared_ptr< ChMaterialSurface > material, const std::vector< ChVector< double >> &pointlist, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a convex hull to this collision model. More... | |
| virtual bool | AddTriangleMesh (std::shared_ptr< ChMaterialSurface > material, std::shared_ptr< geometry::ChTriangleMesh > trimesh, bool is_static, bool is_convex, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1), double sphereswept_thickness=0.0) override |
| Add a triangle mesh to this collision model. More... | |
| virtual bool | AddBarrel (std::shared_ptr< ChMaterialSurface > material, double Y_low, double Y_high, double R_vert, double R_hor, double R_offset, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) override |
| Add a barrel-like shape to this collision model (main axis on Y direction). More... | |
| virtual bool | AddCopyOfAnotherModel (ChCollisionModel *another) override |
| Add all shapes already contained in another model. | |
| virtual void | GetAABB (ChVector<> &bbmin, ChVector<> &bbmax) const override |
| Return the axis aligned bounding box for this collision model. | |
| virtual ChCoordsys | GetShapePos (int index) const override |
| Return the position and orientation of the collision shape with specified index, relative to the model frame. | |
| virtual std::vector< double > | GetShapeDimensions (int index) const override |
| Return shape characteristic dimensions. More... | |
| ChBody * | GetBody () const |
| Return a pointer to the associated body. | |
| void | SetBody (ChBody *body) |
| Set the pointer to the owner rigid body. | |
 Public Member Functions inherited from chrono::collision::ChCollisionModel Public Member Functions inherited from chrono::collision::ChCollisionModel | |
| virtual bool | Add2Dpath (std::shared_ptr< ChMaterialSurface > material, std::shared_ptr< geometry::ChLinePath > mpath, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1), const double thickness=0.001) |
| Add a 2D closed line, defined on the XY plane passing by pos and aligned as rot, that defines a 2D collision shape that will collide with another 2D line of the same type if aligned on the same plane. More... | |
| virtual bool | AddPoint (std::shared_ptr< ChMaterialSurface > material, double radius=0, const ChVector<> &pos=ChVector<>()) |
| Add a point-like sphere, that will collide with other geometries, but won't ever create contacts between them. More... | |
| virtual bool | AddConvexHullsFromFile (std::shared_ptr< ChMaterialSurface > material, ChStreamInAscii &mstream, const ChVector<> &pos=ChVector<>(), const ChMatrix33<> &rot=ChMatrix33<>(1)) |
| Add a cluster of convex hulls specified in a '.chulls' file description. More... | |
| ChContactable * | GetContactable () |
| Get the pointer to the contactable object. | |
| virtual ChPhysicsItem * | GetPhysicsItem () |
| Get the pointer to the client owner ChPhysicsItem. More... | |
| virtual void | SetFamily (int mfamily) |
| By default, all collision objects belong to family n.0, but you can set family in range 0..15. More... | |
| virtual int | GetFamily () |
| virtual void | SetFamilyMaskNoCollisionWithFamily (int mfamily) |
| By default, family mask is all turned on, so all families can collide with this object, but you can turn on-off some bytes of this mask so that some families do not collide. More... | |
| virtual void | SetFamilyMaskDoCollisionWithFamily (int mfamily) |
| virtual bool | GetFamilyMaskDoesCollisionWithFamily (int mfamily) |
| Tells if the family mask of this collision object allows for the collision with another collision object belonging to a given family. More... | |
| virtual short int | GetFamilyGroup () const |
| Return the collision family group of this model. More... | |
| virtual void | SetFamilyGroup (short int group) |
| Set the collision family group of this model. More... | |
| virtual short int | GetFamilyMask () const |
| Return the collision mask for this model. More... | |
| virtual void | SetFamilyMask (short int mask) |
| Set the collision mask for this model. More... | |
| virtual void | SetSafeMargin (double amargin) |
| Set the suggested collision 'inward safe margin' for the shapes to be added from now on, using the AddBox, AddCylinder etc (where, if this margin is too high for some thin or small shapes, it may be clamped). More... | |
| virtual float | GetSafeMargin () |
| Returns the inward safe margin (see SetSafeMargin() ) | |
| virtual void | SetEnvelope (double amargin) |
| Set the suggested collision outward 'envelope' (used from shapes added, from now on, to this collision model). More... | |
| virtual float | GetEnvelope () |
| Return the outward safe margin (see SetEnvelope() ) | |
| virtual void | ArchiveOUT (ChArchiveOut &marchive) |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIN (ChArchiveIn &marchive) |
| Method to allow de-serialization of transient data from archives. | |
| int | GetNumShapes () const |
| Return the number of collision shapes in this model. | |
| const std::vector< std::shared_ptr< ChCollisionShape > > & | GetShapes () const |
| Get the list of collision shapes in this model. | |
| std::shared_ptr< ChCollisionShape > | GetShape (int index) |
| Get the collision shape with specified index. | |
| void | SetShapeMaterial (int index, std::shared_ptr< ChMaterialSurface > mat) |
| Set the contact material for the collision shape with specified index. | |
| void | SetAllShapesMaterial (std::shared_ptr< ChMaterialSurface > mat) |
| Set the contact material for all collision shapes in the model (all shapes will share the material). More... | |
Public Attributes | |
| std::vector< real3 > | local_convex_data |
| ChVector | aabb_min |
| ChVector | aabb_max |
Protected Attributes | |
| ChBody * | mbody |
| Protected Attributes inherited from chrono::collision::ChCollisionModel | |
| float | model_envelope |
| Maximum envelope: surrounding volume from surface to the exterior. | |
| float | model_safe_margin |
| Maximum margin value to be used for fast penetration contact detection. | |
| ChContactable * | mcontactable |
| Pointer to the contactable object. | |
| short int | family_group |
| Collision family group. | |
| short int | family_mask |
| Collision family mask. | |
| std::vector< std::shared_ptr< ChCollisionShape > > | m_shapes |
| list of collision shapes in model | |
Additional Inherited Members | |
| Static Public Member Functions inherited from chrono::collision::ChCollisionModel | |
| static void | SetDefaultSuggestedEnvelope (double menv) |
| Using this function BEFORE you start creating collision shapes, it will make all following collision shapes to take this collision envelope (safe outward layer) as default. More... | |
| static void | SetDefaultSuggestedMargin (double mmargin) |
| Using this function BEFORE you start creating collision shapes, it will make all following collision shapes to take this collision margin (inward penetration layer) as default. More... | |
| static double | GetDefaultSuggestedEnvelope () |
| static double | GetDefaultSuggestedMargin () |
| Protected Member Functions inherited from chrono::collision::ChCollisionModel | |
| void | CopyShapes (ChCollisionModel *other) |
| Copy the collision shapes from another model. | |
| virtual float | GetSuggestedFullMargin () |
Member Function Documentation
◆ AddBarrel()
|
overridevirtual |
Add a barrel-like shape to this collision model (main axis on Y direction).
The barrel shape is made by lathing an arc of an ellipse around the vertical Y axis. The center of the ellipse is on Y=0 level, and it is offsetted by R_offset from the Y axis in radial direction. The two radii of the ellipse are R_vert (for the vertical direction, i.e. the axis parallel to Y) and R_hor (for the axis that is perpendicular to Y). Also, the solid is clamped with two discs on the top and the bottom, at levels Y_low and Y_high.
- Parameters
-
material surface contact material Y_low bottom level Y_high top level R_vert ellipse semi-axis in vertical direction R_hor ellipse semi-axis in horizontal direction R_offset lateral offset (radius at top and bottom) pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddBox()
|
overridevirtual |
Add a box shape to this collision model.
- Parameters
-
material surface contact material hx x half-dimension hy y half-dimension hz z half-dimension pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
Reimplemented in chrono::collision::ChCollisionModelDistributed.
◆ AddCapsule()
|
overridevirtual |
Add a capsule to this collision model (default axis in Y direction).
- Parameters
-
material surface contact material radius radius hlen half-length of capsule axis pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddCone()
|
overridevirtual |
Add a cone to this collision model (default axis on Y direction).
- Parameters
-
material surface contact material rx radius (X direction) rz radius (Z direction) hy half length pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddConvexHull()
|
overridevirtual |
Add a convex hull to this collision model.
A convex hull is simply a point cloud that describe a convex polytope. Connectivity between the vertexes, as faces/edges in triangle meshes is not necessary. Points are passed as a list which is then copied into the model.
- Parameters
-
material surface contact material pointlist list of hull points pos origin position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddCylinder()
|
overridevirtual |
Add a cylinder to this collision model (default axis on Y direction).
- Parameters
-
material surface contact material rx radius (X direction) rz radius (Z direction) hy half length pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddCylindricalShell()
|
overridevirtual |
Add a cylindrical shell to this collision model (default axis in Y direction).
- Parameters
-
material surface contact material radius cylinder radius hlen cylinder half length pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddEllipsoid()
|
overridevirtual |
Add an ellipsoid shape to this collision model.
- Parameters
-
material surface contact material rx x semi-axis ry y semi-axis rz z semi-axis pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddRoundedBox()
|
overridevirtual |
Add a rounded box shape to this collision model.
- Parameters
-
material surface contact material hx x half-dimension hy y half-dimension hz z half-dimension sphere_r radius of sweeping sphere pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddRoundedCone()
|
overridevirtual |
Add a rounded cone to this collision model (default axis on Y direction).
- Parameters
-
material surface contact material rx radius (X direction) rz radius (Z direction) hy half length sphere_r radius of sweeping sphere pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddRoundedCylinder()
|
overridevirtual |
Add a rounded cylinder to this collision model (default axis on Y direction).
- Parameters
-
material surface contact material rx radius (X direction) rz radius (Z direction) hy half length sphere_r radius of sweeping sphere pos center position in model coordinates rot rotation in model coordinates
Implements chrono::collision::ChCollisionModel.
◆ AddSphere()
|
overridevirtual |
Add a sphere shape to this collision model.
- Parameters
-
material surface contact material radius sphere radius pos center position in model coordinates
Implements chrono::collision::ChCollisionModel.
Reimplemented in chrono::collision::ChCollisionModelDistributed.
◆ AddTriangle()
|
virtual |
Add a triangle shape to this model, for collision purposes.
- Parameters
-
material surface contact material A triangle vertex A B triangle vertex B C triangle vertex C pos center position in model coordinates rot rotation in model coordinates
Reimplemented in chrono::collision::ChCollisionModelDistributed.
◆ AddTriangleMesh()
|
overridevirtual |
Add a triangle mesh to this collision model.
Add a triangle mesh to this model.
Note: if possible, for better performance, avoid triangle meshes and prefer simplified representations as compounds of primitive convex shapes (boxes, sphers, etc).
- Parameters
-
material surface contact material trimesh the triangle mesh is_static true if model doesn't move. May improve performance. is_convex if true, a convex hull is used. May improve robustness. pos origin position in model coordinates rot rotation in model coordinates sphereswept_thickness outward sphere-swept layer (when supported)
Implements chrono::collision::ChCollisionModel.
◆ BuildModel()
|
overridevirtual |
Builds the BV hierarchy.
Call this function AFTER adding the geometric description. MUST be inherited by child classes! (ex for bulding BV hierarchies)
Implements chrono::collision::ChCollisionModel.
◆ ClearModel()
|
overridevirtual |
Deletes all inserted geometries.
Also, if you begin the definition of a model, AFTER adding the geometric description, remember to call the ClearModel(). MUST be inherited by child classes! (ex for resetting also BV hierarchies)
Implements chrono::collision::ChCollisionModel.
Reimplemented in chrono::collision::ChCollisionModelDistributed.
◆ GetShapeDimensions()
|
overridevirtual |
Return shape characteristic dimensions.
The following collision shapes are supported:
SPHERE radius BOX x-halfdim y-halfdim z-halfdim ELLIPSOID x-radius y-radius z-radius CYLINDER x-radius z-radius halflength CYLSHELL radius halflength CONE x-radius z-radius halfheight CAPSULE radius halflength ROUNDEDBOX x-halfdim y-halfdim z-halfdim sphere_rad ROUNDEDCYL x-radius z-radius halflength sphere_rad
Implements chrono::collision::ChCollisionModel.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/collision/ChCollisionModelChrono.h
- /builds/uwsbel/chrono/src/chrono/collision/ChCollisionModelChrono.cpp
