Description
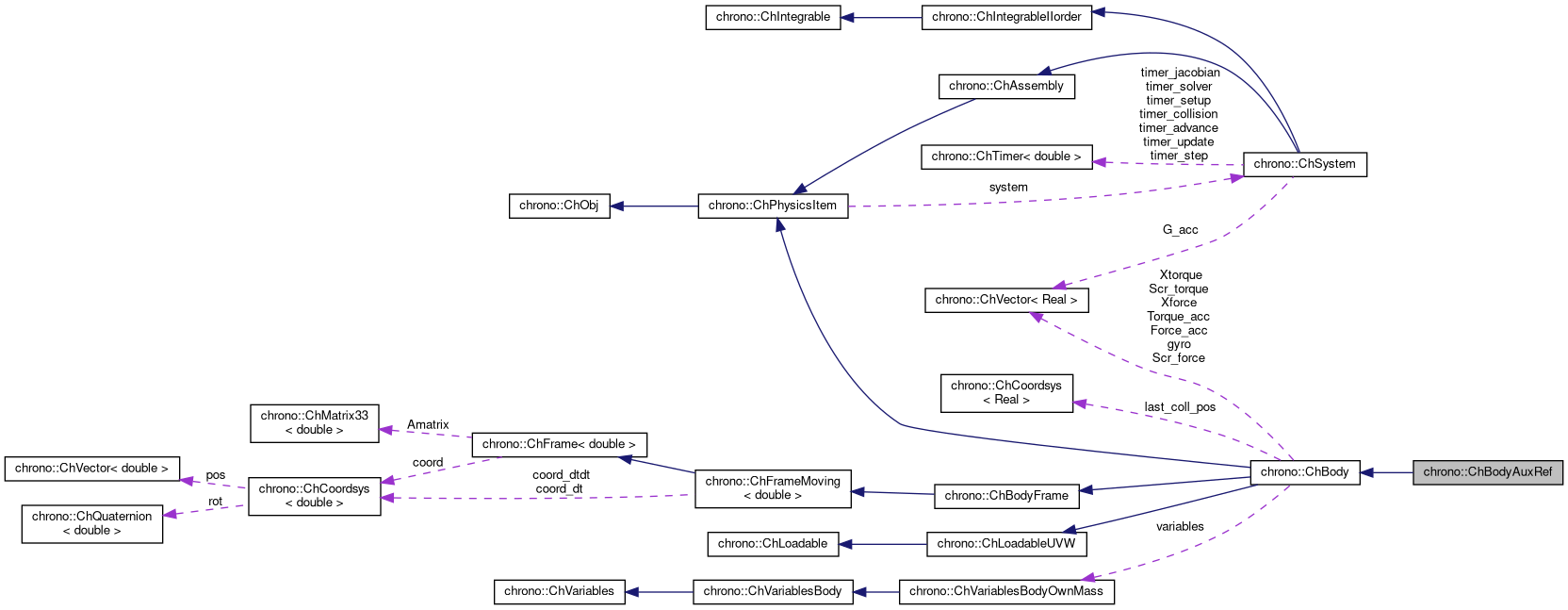
Class for rigid bodies with an auxiliary reference frame.
Unlike ChBody, where the COG frame is used as the reference frame, the auxiliary reference frame of a ChBodyAuxRef can be different from its COG frame. This specialization is provided for situations where it is more convenient to specify collision shapes, visualization assets, and marker positions with respect to a reference frame other than the COG frame. Note that, because of the auxiliary reference, this type of rigid bodies can be slightly less efficient than the base ChBody object.
Additional information can be found in the Rigid bodies manual page.
#include <ChBodyAuxRef.h>

Public Member Functions | |
| ChBodyAuxRef (ChMaterialSurface::ContactMethod contact_method=ChMaterialSurface::NSC) | |
| ChBodyAuxRef (std::shared_ptr< collision::ChCollisionModel > new_coll_model, ChMaterialSurface::ContactMethod contact_method=ChMaterialSurface::NSC) | |
| ChBodyAuxRef (const ChBodyAuxRef &other) | |
| virtual ChBodyAuxRef * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| void | SetFrame_REF_to_abs (const ChFrame<> &mfra) |
| Set the auxiliary reference frame with respect to the absolute frame. More... | |
| virtual const ChFrameMoving & | GetFrame_REF_to_abs () const override |
| Get the auxiliary reference frame with respect to the absolute frame. More... | |
| void | SetFrame_COG_to_REF (const ChFrame<> &mloc) |
| Set the COG frame with respect to the auxiliary reference frame. More... | |
| ChFrame | GetFrame_COG_to_REF () const |
| Get the COG frame with respect to the auxiliary reference frame. | |
| void | SetFrame_REF_to_COG (const ChFrame<> &mloc) |
| Set the auxiliary reference frame with respect to the COG frame. More... | |
| const ChFrame & | GetFrame_REF_to_COG () const |
| Get the auxiliary reference frame with respect to the COG frame. | |
| virtual void | Update (bool update_assets=true) override |
| Update all auxiliary data of the rigid body and of its children (markers, forces..) | |
| virtual void | ArchiveOUT (ChArchiveOut &marchive) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIN (ChArchiveIn &marchive) override |
| Method to allow deserialization of transient data from archives. More... | |
 Public Member Functions inherited from chrono::ChBody Public Member Functions inherited from chrono::ChBody | |
| ChBody (ChMaterialSurface::ContactMethod contact_method=ChMaterialSurface::NSC) | |
| Build a rigid body. | |
| ChBody (std::shared_ptr< collision::ChCollisionModel > new_collision_model, ChMaterialSurface::ContactMethod contact_method=ChMaterialSurface::NSC) | |
| Build a rigid body with a different collision model. | |
| ChBody (const ChBody &other) | |
| virtual | ~ChBody () |
| Destructor. | |
| void | SetBodyFixed (bool state) |
| Sets the 'fixed' state of the body. More... | |
| bool | GetBodyFixed () const |
| Return true if this body is fixed to ground. | |
| void | SetEvalContactCn (bool state) |
| If true, the normal restitution coefficient is evaluated from painted material channel. | |
| bool | GetEvalContactCn () const |
| void | SetEvalContactCt (bool state) |
| If true, the tangential restitution coefficient is evaluated from painted material channel. | |
| bool | GetEvalContactCt () const |
| void | SetEvalContactKf (bool state) |
| If true, the kinetic friction coefficient is evaluated from painted material channel. | |
| bool | GetEvalContactKf () const |
| void | SetEvalContactSf (bool state) |
| If true, the static friction coefficient is evaluated from painted material channel. | |
| bool | GetEvalContactSf () const |
| void | SetCollide (bool state) |
| Enable/disable the collision for this rigid body. More... | |
| virtual bool | GetCollide () const override |
| Return true if collision is enabled for this body. | |
| void | SetShowCollisionMesh (bool state) |
| Show collision mesh in 3D views. | |
| bool | GetShowCollisionMesh () const |
| Return true if collision mesh is shown in 3D views. | |
| void | SetLimitSpeed (bool state) |
| Enable the maximum linear speed limit (beyond this limit it will be clamped). More... | |
| bool | GetLimitSpeed () const |
| Return true if maximum linear speed is limited. | |
| void | SetNoGyroTorque (bool state) |
| Deactivate the gyroscopic torque (quadratic term). More... | |
| bool | GetNoGyroTorque () const |
| Return true if gyroscopic torque is deactivated. | |
| void | SetUseSleeping (bool state) |
| Enable/disable option for setting bodies to "sleep". More... | |
| bool | GetUseSleeping () const |
| Return true if 'sleep' mode is activated. | |
| void | SetSleeping (bool state) |
| Force the body in sleeping mode or not (usually this state change is not handled by users, anyway, because it is mostly automatic). | |
| bool | GetSleeping () const |
| Return true if this body is currently in 'sleep' mode. | |
| bool | TrySleeping () |
| Test if a body could go in sleeping state if requirements are satisfied. More... | |
| bool | IsActive () |
| Return true if the body is active; i.e. More... | |
| void | SetId (int id) |
| Set body id for indexing (internal use only) | |
| unsigned int | GetId () |
| Set body id for indexing (internal use only) | |
| void | SetGid (unsigned int id) |
| Set global body index (internal use only) | |
| unsigned int | GetGid () const |
| Get the global body index (internal use only) | |
| virtual int | GetDOF () override |
| Number of coordinates of body: 7 because uses quaternions for rotation. | |
| virtual int | GetDOF_w () override |
| Number of coordinates of body: 6 because derivatives use angular velocity. | |
| ChVariablesBodyOwnMass & | VariablesBody () override |
| Returns reference to the encapsulated ChVariablesBody, representing body variables (pos, speed, or accel.) and forces. More... | |
| ChVariables & | Variables () override |
| void | SetNoSpeedNoAcceleration () override |
| Set no speed and no accelerations (but does not change the position) | |
| void | SetCollisionModel (std::shared_ptr< collision::ChCollisionModel > new_collision_model) |
| Change the collision model. | |
| std::shared_ptr< collision::ChCollisionModel > | GetCollisionModel () |
| Access the collision model for the collision engine. More... | |
| virtual void | SyncCollisionModels () override |
| Synchronize coll.model coordinate and bounding box to the position of the body. | |
| virtual void | AddCollisionModelsToSystem () override |
| If this physical item contains one or more collision models, add them to the system's collision engine. | |
| virtual void | RemoveCollisionModelsFromSystem () override |
| If this physical item contains one or more collision models, remove them from the system's collision engine. | |
| bool | RecomputeCollisionModel () |
| Update the optimization structures (OOBB, ABB, etc.) of the collision model, from the associated geometry in some external object (es.CAD). | |
| const ChCoordsys & | GetLastCollPos () const |
| Gets the last position when the collision detection was performed last time (i.e. More... | |
| void | SynchronizeLastCollPos () |
| Stores the current position in the last-collision-position buffer. | |
| virtual const ChFrameMoving & | GetFrame_COG_to_abs () const |
| Get the rigid body coordinate system that represents the GOG (Center of Gravity). More... | |
| virtual ChFrame | GetAssetsFrame (unsigned int nclone=0) override |
| Get the master coordinate system for the assets (this will return the main coordinate system of the rigid body) | |
| virtual void | GetTotalAABB (ChVector<> &bbmin, ChVector<> &bbmax) override |
| Get the entire AABB axis-aligned bounding box of the object, as defined by the collision model (if any). | |
| virtual void | StreamINstate (ChStreamInBinary &mstream) override |
| Method to deserialize only the state (position, speed) | |
| virtual void | StreamOUTstate (ChStreamOutBinary &mstream) override |
| Method to serialize only the state (position, speed) | |
| ChMaterialSurface::ContactMethod | GetContactMethod () const |
| Infer the contact method from the underlying material properties object. | |
| std::shared_ptr< ChMaterialSurfaceNSC > | GetMaterialSurfaceNSC () |
| Access the NSC material surface properties associated with this body. More... | |
| std::shared_ptr< ChMaterialSurfaceSMC > | GetMaterialSurfaceSMC () |
| Access the SMC material surface properties associated with this body. More... | |
| void | SetMaterialSurface (const std::shared_ptr< ChMaterialSurface > &mnewsurf) |
| Set the material surface properties by passing a ChMaterialSurfaceNSC or ChMaterialSurfaceSMC object. | |
| void | SetDensity (float mdensity) |
| The density of the rigid body, as [mass]/[unit volume]. More... | |
| void | AddMarker (std::shared_ptr< ChMarker > amarker) |
| Attach a marker to this body. | |
| void | AddForce (std::shared_ptr< ChForce > aforce) |
| Attach a force to this body. | |
| void | RemoveMarker (std::shared_ptr< ChMarker > amarker) |
| Remove a specific marker from this body. Warning: linear time search. | |
| void | RemoveForce (std::shared_ptr< ChForce > aforce) |
| Remove a specific force from this body. Warning: linear time search. | |
| void | RemoveAllForces () |
| Remove all markers at once. More... | |
| void | RemoveAllMarkers () |
| Remove all markers at once. More... | |
| std::shared_ptr< ChMarker > | SearchMarker (const char *m_name) |
| Finds a marker from its ChObject name. | |
| std::shared_ptr< ChForce > | SearchForce (const char *m_name) |
| Finds a force from its ChObject name. | |
| const std::vector< std::shared_ptr< ChMarker > > & | GetMarkerList () const |
| Gets the list of children markers. More... | |
| const std::vector< std::shared_ptr< ChForce > > & | GetForceList () const |
| Gets the list of children forces. More... | |
| ChVector | Point_World2Body (const ChVector<> &mpoint) |
| ChVector | Point_Body2World (const ChVector<> &mpoint) |
| ChVector | Dir_World2Body (const ChVector<> &mpoint) |
| ChVector | Dir_Body2World (const ChVector<> &mpoint) |
| ChVector | RelPoint_AbsSpeed (const ChVector<> &mrelpoint) |
| ChVector | RelPoint_AbsAcc (const ChVector<> &mrelpoint) |
| void | SetMass (double newmass) |
| Mass of the rigid body. More... | |
| double | GetMass () |
| void | SetInertia (const ChMatrix33<> &newXInertia) |
| Set the inertia tensor of the body. More... | |
| const ChMatrix33 & | GetInertia () |
| Get a reference to the inertia tensor, expressed in local coordinate system. More... | |
| void | SetInertiaXX (const ChVector<> &iner) |
| Set the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| ChVector | GetInertiaXX () |
| Get the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| void | SetInertiaXY (const ChVector<> &iner) |
| Set the off-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values). More... | |
| ChVector | GetInertiaXY () |
| Get the extra-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values) Warning about sign: in some books they write the inertia tensor as I=[Ixx, -Ixy, -Ixz; etc. More... | |
| void | SetMaxSpeed (float m_max_speed) |
| Set the maximum linear speed (beyond this limit it will be clamped). More... | |
| float | GetMaxSpeed () const |
| void | SetMaxWvel (float m_max_wvel) |
| Set the maximum angular speed (beyond this limit it will be clamped). More... | |
| float | GetMaxWvel () const |
| void | ClampSpeed () |
| Clamp the body speed to the provided limits. More... | |
| void | SetSleepTime (float m_t) |
| Set the amount of time which must pass before going automatically in sleep mode when the body has very small movements. | |
| float | GetSleepTime () const |
| void | SetSleepMinSpeed (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinSpeed () const |
| void | SetSleepMinWvel (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinWvel () const |
| void | ComputeQInertia (ChMatrix44<> &mQInertia) |
| Computes the 4x4 inertia tensor in quaternion space, if needed. | |
| void | ComputeGyro () |
| Computes the gyroscopic torque. More... | |
| void | Add_as_lagrangian_force (const ChVector<> &force, const ChVector<> &appl_point, bool local, ChVectorN< double, 7 > &mQf) |
| Transform and adds a Cartesian force to a generic 7x1 vector of body lagrangian forces mQf . More... | |
| void | Add_as_lagrangian_torque (const ChVector<> &torque, bool local, ChVectorN< double, 7 > &mQf) |
| void | Accumulate_force (const ChVector<> &force, const ChVector<> &appl_point, bool local) |
| Add forces and torques into the "accumulators", as increment. More... | |
| void | Accumulate_torque (const ChVector<> &torque, bool local) |
| void | Empty_forces_accumulators () |
| const ChVector & | Get_accumulated_force () const |
| const ChVector & | Get_accumulated_torque () const |
| const ChVector & | Get_Scr_force () const |
| To get & set the 'script' force buffers(only accessed by external scripts, so It's up to the script to remember to set& reset them -link class just add them to all other forces. More... | |
| const ChVector & | Get_Scr_torque () const |
| void | Set_Scr_force (const ChVector<> &mf) |
| void | Set_Scr_torque (const ChVector<> &mf) |
| void | Accumulate_script_force (const ChVector<> &force, const ChVector<> &appl_point, bool local) |
| void | Accumulate_script_torque (const ChVector<> &torque, bool local) |
| const ChVector & | Get_gyro () const |
| Return the gyroscopic torque. | |
| const ChVector & | Get_Xforce () const |
| Get the total force applied to the rigid body (applied at center of mass. More... | |
| const ChVector & | Get_Xtorque () const |
| Get the total torque applied to the rigid body (expressed in body coordinates). More... | |
| void | UpdateMarkers (double mytime) |
| Update all children markers of the rigid body, at current body state. | |
| void | UpdateForces (double mytime) |
| Update all children forces of the rigid body, at current body state. | |
| void | UpdateTime (double mytime) |
| Update local time of rigid body, and time-dependent data. | |
| virtual void | Update (double mytime, bool update_assets=true) override |
| Update all auxiliary data of the rigid body and of its children (markers, forces..), at given time. | |
| virtual std::shared_ptr< ChMaterialSurface > & | GetMaterialSurface () override |
| Return the pointer to the surface material. More... | |
| ChVector | GetContactForce () |
| Get the resultant contact force acting on this body. | |
| ChVector | GetContactTorque () |
| Get the resultant contact torque acting on this body. | |
| virtual ChPhysicsItem * | GetPhysicsItem () override |
| This is only for backward compatibility. | |
| virtual void | LoadableGetVariables (std::vector< ChVariables * > &mvars) override |
| Get the pointers to the contained ChVariables, appending to the mvars vector. | |
| virtual void | LoadableStateIncrement (const unsigned int off_x, ChState &x_new, const ChState &x, const unsigned int off_v, const ChStateDelta &Dv) override |
| Increment all DOFs using a delta. | |
| virtual void | LoadableGetStateBlock_x (int block_offset, ChState &mD) override |
| Gets all the DOFs packed in a single vector (position part) | |
| virtual void | LoadableGetStateBlock_w (int block_offset, ChStateDelta &mD) override |
| Gets all the DOFs packed in a single vector (speed part) | |
| virtual void | ComputeNF (const double U, const double V, const double W, ChVectorDynamic<> &Qi, double &detJ, const ChVectorDynamic<> &F, ChVectorDynamic<> *state_x, ChVectorDynamic<> *state_w) override |
| Evaluate Q=N'*F, for Q generalized lagrangian load, where N is some type of matrix evaluated at point P(U,V,W) assumed in absolute coordinates, and F is a load assumed in absolute coordinates. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem() | |
| virtual void | SetSystem (ChSystem *m_system) |
| Set the pointer to the parent ChSystem() and also add to new collision system / remove from old coll.system. | |
| void | AddAsset (std::shared_ptr< ChAsset > masset) |
| Add an optional asset (it can be used to define visualization shapes, es ChSphereShape, or textures, or custom attached properties that the user can define by creating his class inherited from ChAsset) | |
| std::vector< std::shared_ptr< ChAsset > > & | GetAssets () |
| Access to the list of optional assets. | |
| std::shared_ptr< ChAsset > | GetAssetN (unsigned int num) |
| Access the Nth asset in the list of optional assets. | |
| virtual unsigned int | GetAssetsFrameNclones () |
| Optionally, a ChPhysicsItem can return multiple asset coordinate systems; this can be helpful if, for example, when a ChPhysicsItem contains 'clones' with the same assets (ex. More... | |
| virtual void | GetCenter (ChVector<> &mcenter) |
| Get a symbolic 'center' of the object. More... | |
| virtual void | Setup () |
| This might recompute the number of coordinates, DOFs, constraints, in case this might change (ex in ChAssembly), as well as state offsets of contained items (ex in ChMesh) | |
| virtual int | GetDOC () |
| Get the number of scalar constraints, if any, in this item. | |
| virtual int | GetDOC_c () |
| Get the number of scalar constraints, if any, in this item (only bilateral constr.) Children classes might override this. | |
| virtual int | GetDOC_d () |
| Get the number of scalar constraints, if any, in this item (only unilateral constr.) Children classes might override this. | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the lagrangian multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the lagrangian multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | IntStateGatherReactions (const unsigned int off_L, ChVectorDynamic<> &L) |
| From item's reaction forces to global reaction vector. More... | |
| virtual void | IntStateScatterReactions (const unsigned int off_L, const ChVectorDynamic<> &L) |
| From global reaction vector to item's reaction forces. More... | |
| virtual void | IntLoadResidual_CqL (const unsigned int off_L, ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) |
| Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L. More... | |
| virtual void | IntLoadConstraint_C (const unsigned int off, ChVectorDynamic<> &Qc, const double c, bool do_clamp, double recovery_clamp) |
| Takes the term C, scale and adds to Qc at given offset: Qc += c*C. More... | |
| virtual void | IntLoadConstraint_Ct (const unsigned int off, ChVectorDynamic<> &Qc, const double c) |
| Takes the term Ct, scale and adds to Qc at given offset: Qc += c*Ct. More... | |
| virtual void | InjectConstraints (ChSystemDescriptor &mdescriptor) |
| Tell to a system descriptor that there are constraints of type ChConstraint in this object (for further passing it to a solver) Basically does nothing, but maybe that inherited classes may specialize this. | |
| virtual void | ConstraintsBiReset () |
| Sets to zero the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_C (double factor=1, double recovery_clamp=0.1, bool do_clamp=false) |
| Adds the current C (constraint violation) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Ct (double factor=1) |
| Adds the current Ct (partial t-derivative, as in C_dt=0-> [Cq]*q_dt=-Ct) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| virtual void | ConstraintsLoadJacobians () |
| Adds the current jacobians in encapsulated ChConstraints. | |
| virtual void | ConstraintsFetch_react (double factor=1) |
| Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints. More... | |
| virtual void | InjectKRMmatrices (ChSystemDescriptor &mdescriptor) |
| Tell to a system descriptor that there are items of type ChKblock in this object (for further passing it to a solver) Basically does nothing, but maybe that inherited classes may specialize this. | |
| virtual void | KRMmatricesLoad (double Kfactor, double Rfactor, double Mfactor) |
| Adds the current stiffness K and damping R and mass M matrices in encapsulated ChKblock item(s), if any. More... | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Gets the numerical identifier of the object. | |
| void | SetIdentifier (int id) |
| Sets the numerical identifier of the object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| const char * | GetName () const |
| Gets the name of the object as C Ascii null-terminated string -for reading only! | |
| void | SetName (const char myname[]) |
| Sets the name of this object, as ascii string. | |
| std::string | GetNameString () const |
| Gets the name of the object as C Ascii null-terminated string. | |
| void | SetNameString (const std::string &myname) |
| Sets the name of this object, as std::string. | |
| void | MFlagsSetAllOFF (int &mflag) |
| void | MFlagsSetAllON (int &mflag) |
| void | MFlagSetON (int &mflag, int mask) |
| void | MFlagSetOFF (int &mflag, int mask) |
| int | MFlagGet (int &mflag, int mask) |
| virtual std::string & | ArchiveContainerName () |
| Public Member Functions inherited from chrono::ChBodyFrame | |
| ChBodyFrame (const ChBodyFrame &other) | |
| void | To_abs_forcetorque (const ChVector<> &force, const ChVector<> &appl_point, bool local, ChVector<> &resultforce, ChVector<> &resulttorque) |
| Transform generic cartesian force into absolute force+torque applied to body COG. More... | |
| void | To_abs_torque (const ChVector<> &torque, bool local, ChVector<> &resulttorque) |
| Transform generic cartesian torque into absolute torque applied to body COG. More... | |
| Public Member Functions inherited from chrono::ChFrameMoving< double > | |
| ChFrameMoving (const ChVector< double > &mv=ChVector< double >(0, 0, 0), const ChQuaternion< double > &mq=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from pos and rot (as a quaternion) | |
| ChFrameMoving (const ChVector< double > &mv, const ChMatrix33< double > &ma) | |
| Construct from pos and rotation (as a 3x3 matrix) | |
| ChFrameMoving (const ChCoordsys< double > &mc) | |
| Construct from a coordsys. | |
| ChFrameMoving (const ChFrame< double > &mc) | |
| Construct from a frame. | |
| ChFrameMoving (const ChFrameMoving< double > &other) | |
| Copy constructor, build from another moving frame. | |
| virtual | ~ChFrameMoving () |
| Destructor. | |
| ChFrameMoving< double > & | operator= (const ChFrameMoving< double > &other) |
| Assignment operator: copy from another moving frame. | |
| ChFrameMoving< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrameMoving< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrameMoving< double > &other) const |
| Returns true for different frames. | |
| ChFrameMoving< double > | operator>> (const ChFrameMoving< double > &Fb) const |
| The '>>' operator transforms a coordinate system, so transformations can be represented with this syntax: new_frame = old_frame >> tr_frame; For a sequence of transformations, i.e. More... | |
| ChFrameMoving< double > | operator* (const ChFrameMoving< double > &Fb) const |
| The '*' operator transforms a coordinate system, so transformations can be represented with this syntax: new_frame = tr_frame * old_frame; For a sequence of transformations, i.e. More... | |
| ChFrameMoving< double > & | operator>>= (const ChFrameMoving< double > &T) |
| Performs pre-multiplication of this frame by another frame, for example: A>>=T means A'=T*A ; or A'=A >> T. | |
| ChFrameMoving< double > & | operator>>= (const ChVector< double > &D) |
| Performs pre-multiplication of this frame by a vector D, to 'move' by a displacement D: | |
| ChFrameMoving< double > & | operator>>= (const ChQuaternion< double > &R) |
| Performs pre-multiplication of this frame by a quaternion R, to 'rotate' it by R: | |
| ChFrameMoving< double > & | operator>>= (const ChCoordsys< double > &F) |
| Performs pre-multiplication of this frame by a ChCoordsys F: | |
| ChFrameMoving< double > & | operator>>= (const ChFrame< double > &F) |
| Performs pre-multiplication of this frame by a ChFrame F: | |
| ChFrameMoving< double > & | operator%= (const ChFrameMoving< double > &T) |
| Performs pre-multiplication of this frame by another frame, for example: A%=T means A'=T*A ; or A'=A >> T Note: DEPRECATED, use >>= instead. | |
| ChFrameMoving< double > & | operator*= (const ChFrameMoving< double > &T) |
| Performs post-multiplication of this frame by another frame, for example: A*=T means A'=A*T ; or A'=T >> A. | |
| ChCoordsys< double > & | GetCoord_dt () |
| Return both current rotation and translation speeds as a coordsystem object, with vector and quaternion. | |
| const ChCoordsys< double > & | GetCoord_dt () const |
| ChCoordsys< double > & | GetCoord_dtdt () |
| Return both current rotation and translation accelerations as a coordsystem object, with vector and quaternion. | |
| const ChCoordsys< double > & | GetCoord_dtdt () const |
| ChVector< double > & | GetPos_dt () |
| Return the current speed as a 3d vector. | |
| const ChVector< double > & | GetPos_dt () const |
| ChVector< double > & | GetPos_dtdt () |
| Return the current acceleration as a 3d vector. | |
| const ChVector< double > & | GetPos_dtdt () const |
| ChQuaternion< double > & | GetRot_dt () |
| Return the current rotation speed as a quaternion. | |
| const ChQuaternion< double > & | GetRot_dt () const |
| ChQuaternion< double > & | GetRot_dtdt () |
| Return the current rotation acceleration as a quaternion. | |
| const ChQuaternion< double > & | GetRot_dtdt () const |
| ChVector< double > | GetWvel_loc () const |
| Computes the actual angular speed (expressed in local coords) | |
| ChVector< double > | GetWvel_par () const |
| Computes the actual angular speed (expressed in parent coords) | |
| ChVector< double > | GetWacc_loc () const |
| Computes the actual angular acceleration (expressed in local coords) | |
| ChVector< double > | GetWacc_par () const |
| Computes the actual angular acceleration (expressed in parent coords) | |
| virtual void | SetCoord_dt (const ChCoordsys< double > &mcoord_dt) |
| Set both linear speed and rotation speed as a single ChCoordsys derivative. | |
| virtual void | SetPos_dt (const ChVector< double > &mvel) |
| Set the linear speed. | |
| virtual void | SetRot_dt (const ChQuaternion< double > &mrot_dt) |
| Set the rotation speed as a quaternion. More... | |
| virtual void | SetWvel_loc (const ChVector< double > &wl) |
| Set the rotation speed from given angular speed (expressed in local csys) | |
| virtual void | SetWvel_par (const ChVector< double > &wp) |
| Set the rotation speed from given angular speed (expressed in parent csys) | |
| virtual void | SetCoord_dtdt (const ChCoordsys< double > &mcoord_dtdt) |
| Set both linear acceleration and rotation acceleration as a single ChCoordsys derivative. | |
| virtual void | SetPos_dtdt (const ChVector< double > &macc) |
| Set the linear acceleration. | |
| virtual void | SetRot_dtdt (const ChQuaternion< double > &mrot_dtdt) |
| Set the rotation acceleration as a quaternion derivative. More... | |
| virtual void | SetWacc_loc (const ChVector< double > &al) |
| Set the rotation acceleration from given angular acceleration (expressed in local csys) | |
| virtual void | SetWacc_par (ChVector< double > &ap) |
| Set the rotation speed from given angular speed (expressed in parent csys) | |
| void | Compute_Adt (ChMatrix33< double > &mA_dt) const |
| Computes the time derivative of rotation matrix, mAdt. | |
| void | Compute_Adtdt (ChMatrix33< double > &mA_dtdt) |
| Computes the 2nd time derivative of rotation matrix, mAdtdt. | |
| ChMatrix33< double > | GetA_dt () |
| Computes and returns an Adt matrix (-note: prefer using Compute_Adt() directly for better performance) | |
| ChMatrix33< double > | GetA_dtdt () |
| Computes and returns an Adt matrix (-note: prefer using Compute_Adtdt() directly for better performance) | |
| void | ConcatenatePreTransformation (const ChFrameMoving< double > &T) |
| Apply a transformation (rotation and translation) represented by another ChFrameMoving T. More... | |
| void | ConcatenatePostTransformation (const ChFrameMoving< double > &T) |
| Apply a transformation (rotation and translation) represented by another ChFrameMoving T in local coordinate. More... | |
| ChVector< double > | PointSpeedLocalToParent (const ChVector< double > &localpos) const |
| Given the position of a point in local frame coords, and assuming it is sticky to frame, return the speed in parent coords. | |
| ChVector< double > | PointSpeedLocalToParent (const ChVector< double > &localpos, const ChVector< double > &localspeed) const |
| Given the position localpos of a point in the local reference frame, assuming that the point moves in the local reference frame with localspeed, return the speed in the parent reference frame. | |
| ChVector< double > | PointAccelerationLocalToParent (const ChVector< double > &localpos) const |
| Given the position of a point in local frame coords, and assuming it is sticky to frame, return the acceleration in parent coords. | |
| ChVector< double > | PointAccelerationLocalToParent (const ChVector< double > &localpos, const ChVector< double > &localspeed, const ChVector< double > &localacc) const |
| Given the position of a point in local frame coords, and assuming it has a frame-relative speed localspeed and frame-relative acceleration localacc, return the acceleration in parent coords. | |
| ChVector< double > | PointSpeedParentToLocal (const ChVector< double > &parentpos, const ChVector< double > &parentspeed) const |
| Given the position of a point in parent frame coords, and assuming it has an absolute speed parentspeed, return the speed in local coords. | |
| ChVector< double > | PointAccelerationParentToLocal (const ChVector< double > &parentpos, const ChVector< double > &parentspeed, const ChVector< double > &parentacc) const |
| Given the position of a point in parent frame coords, and assuming it has an absolute speed parentspeed and absolute acceleration parentacc, return the acceleration in local coords. | |
| void | TransformLocalToParent (const ChFrameMoving< double > &local, ChFrameMoving< double > &parent) const |
| This function transforms a frame from 'this' local coordinate system to parent frame coordinate system, and also transforms the speed and acceleration of the frame. More... | |
| void | TransformParentToLocal (const ChFrameMoving< double > &parent, ChFrameMoving< double > &local) const |
| This function transforms a frame from the parent coordinate system to 'this' local frame coordinate system. More... | |
| bool | Equals (const ChFrameMoving< double > &other) const |
| Returns true if coordsys is identical to other coordsys. | |
| bool | Equals (const ChFrameMoving< double > &other, double tol) const |
| Returns true if coordsys is equal to other coordsys, within a tolerance 'tol'. | |
| virtual void | Invert () override |
| The transformation (also for speeds, accelerations) is inverted in place. More... | |
| ChFrameMoving< double > | GetInverse () const |
| Public Member Functions inherited from chrono::ChFrame< double > | |
| ChFrame (const ChVector< double > &mv=ChVector< double >(0, 0, 0), const ChQuaternion< double > &mq=ChQuaternion< double >(1, 0, 0, 0)) | |
| Default constructor, or construct from pos and rot (as a quaternion) | |
| ChFrame (const ChVector< double > &mv, const ChMatrix33< double > &ma) | |
| Construct from pos and rotation (as a 3x3 matrix) | |
| ChFrame (const ChCoordsys< double > &mc) | |
| Construct from a coordsys. | |
| ChFrame (const ChVector< double > &mv, const double alpha, const ChVector< double > &mu) | |
| Construct from position mv and rotation of angle alpha around unit vector mu. | |
| ChFrame (const ChFrame< double > &other) | |
| Copy constructor, build from another frame. | |
| ChFrame< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| virtual bool | operator== (const ChFrame< double > &other) const |
| Returns true for identical frames. | |
| virtual bool | operator!= (const ChFrame< double > &other) const |
| Returns true for different frames. | |
| ChFrame< double > | operator>> (const ChFrame< double > &Fb) const |
| The '>>' operator transforms a coordinate system, so transformations can be represented with this syntax: new_frame = old_frame >> tr_frame; For a sequence of transformations, i.e. More... | |
| ChFrame< double > | operator* (const ChFrame< double > &Fb) const |
| The '>>' operator transforms a vector, so transformations can be represented with this syntax: new_v = old_v >> tr_frame; For a sequence of transformations, i.e. More... | |
| ChVector< double > | operator* (const ChVector< double > &V) const |
| The '*' operator transforms a vector, so transformations can be represented with this syntax: new_v = tr_frame * old_v; For a sequence of transformations, i.e. More... | |
| ChVector< double > | operator/ (const ChVector< double > &V) const |
| The '/' is like the '*' operator (see), but uses the inverse transformation for A, in A/b. More... | |
| ChFrame< double > & | operator>>= (const ChFrame< double > &T) |
| Performs pre-multiplication of this frame by another frame, for example: A>>=T means A'=T*A ; or A'=A >> T. | |
| ChFrame< double > & | operator>>= (const ChVector< double > &D) |
| Performs pre-multiplication of this frame by a vector D, to 'move' by a displacement D: | |
| ChFrame< double > & | operator>>= (const ChQuaternion< double > &R) |
| Performs pre-multiplication of this frame by a quaternion R, to 'rotate' it by R: | |
| ChFrame< double > & | operator>>= (const ChCoordsys< double > &F) |
| Performs pre-multiplication of this frame by a ChCoordsys F, to transform it: | |
| ChFrame< double > & | operator%= (const ChFrame< double > &T) |
| Performs pre-multiplication of this frame by another frame, for example: A%=T means A'=T*A ; or A'=A >> T Note: DEPRECATED, use >>= instead. | |
| ChFrame< double > & | operator*= (const ChFrame< double > &T) |
| Performs post-multiplication of this frame by another frame, for example: A*=T means A'=A*T ; or A'=T >> A. | |
| ChCoordsys< double > & | GetCoord () |
| Return both current rotation and translation as a coordsystem object, with vector and quaternion. | |
| const ChCoordsys< double > & | GetCoord () const |
| ChVector< double > & | GetPos () |
| Return the current translation as a 3d vector. | |
| const ChVector< double > & | GetPos () const |
| ChQuaternion< double > & | GetRot () |
| Return the current rotation as a quaternion. | |
| const ChQuaternion< double > & | GetRot () const |
| ChMatrix33< double > & | GetA () |
| Return the current rotation as a 3x3 matrix. | |
| const ChMatrix33< double > & | GetA () const |
| ChVector< double > | GetRotAxis () |
| Get axis of finite rotation, in parent space. | |
| double | GetRotAngle () |
| Get angle of rotation about axis of finite rotation. | |
| virtual void | SetCoord (const ChCoordsys< double > &mcoord) |
| Impose both translation and rotation as a single ChCoordsys. More... | |
| virtual void | SetCoord (const ChVector< double > &mv, const ChQuaternion< double > &mq) |
| Impose both translation and rotation. More... | |
| virtual void | SetRot (const ChQuaternion< double > &mrot) |
| Impose the rotation as a quaternion. More... | |
| virtual void | SetRot (const ChMatrix33< double > &mA) |
| Impose the rotation as a 3x3 matrix. More... | |
| virtual void | SetPos (const ChVector< double > &mpos) |
| Impose the translation. | |
| void | ConcatenatePreTransformation (const ChFrame< double > &T) |
| Apply a transformation (rotation and translation) represented by another ChFrame T. More... | |
| void | ConcatenatePostTransformation (const ChFrame< double > &T) |
| Apply a transformation (rotation and translation) represented by another ChFrame T in local coordinate. More... | |
| void | Move (const ChVector< double > &V) |
| An easy way to move the frame by the amount specified by vector V, (assuming V expressed in parent coordinates) | |
| void | Move (const ChCoordsys< double > &VR) |
| Apply both translation and rotation, assuming both expressed in parent coordinates, as a vector for translation and quaternion for rotation,. | |
| virtual ChVector< double > | TransformLocalToParent (const ChVector< double > &local) const |
| This function transforms a point from the local frame coordinate system to the parent coordinate system. More... | |
| virtual void | TransformLocalToParent (const ChFrame< double > &local, ChFrame< double > &parent) const |
| This function transforms a frame from 'this' local coordinate system to parent frame coordinate system. More... | |
| virtual ChVector< double > | TransformPointLocalToParent (const ChVector< double > &local) const |
| virtual ChVector< double > | TransformParentToLocal (const ChVector< double > &parent) const |
| This function transforms a point from the parent coordinate system to local frame coordinate system. More... | |
| virtual void | TransformParentToLocal (const ChFrame< double > &parent, ChFrame< double > &local) const |
| This function transforms a frame from the parent coordinate system to 'this' local frame coordinate system. More... | |
| virtual ChVector< double > | TransformPointParentToLocal (const ChVector< double > &parent) const |
| virtual ChVector< double > | TransformDirectionParentToLocal (const ChVector< double > &mdirection) const |
| This function transforms a direction from 'this' local coordinate system to parent frame coordinate system. More... | |
| virtual ChVector< double > | TransformDirectionLocalToParent (const ChVector< double > &mdirection) const |
| This function transforms a direction from the parent frame coordinate system to 'this' local coordinate system. More... | |
| bool | Equals (const ChFrame< double > &other) const |
| Returns true if coordsys is identical to other coordsys. | |
| bool | Equals (const ChFrame< double > &other, double tol) const |
| Returns true if coordsys is equal to other coordsys, within a tolerance 'tol'. | |
| void | Normalize () |
| Normalize the rotation, so that quaternion has unit length. | |
| virtual void | SetIdentity () |
| Sets to no translation and no rotation. | |
| ChFrame< double > | GetInverse () const |
| Public Member Functions inherited from chrono::ChLoadableUVW | |
| virtual bool | IsTetrahedronIntegrationNeeded () |
| If true, use quadrature over u,v,w in [0..1] range as tetrahedron volumetric coords (with z=1-u-v-w) otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
| virtual bool | IsTrianglePrismIntegrationNeeded () |
| If true, use quadrature over u,v in [0..1] range as triangle natural coords (with z=1-u-v), and use linear quadrature over w in [-1..+1], otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
Additional Inherited Members | |
| Public Attributes inherited from chrono::ChFrameMoving< double > | |
| ChCoordsys< double > | coord_dt |
| Rotation and position speed, as vector+quaternion. | |
| ChCoordsys< double > | coord_dtdt |
| Rotation and position acceleration, as vector+quaternion. | |
| Public Attributes inherited from chrono::ChFrame< double > | |
| ChCoordsys< double > | coord |
| Rotation and position, as vector+quaternion. | |
| ChMatrix33< double > | Amatrix |
| 3x3 orthogonal rotation matrix | |
| Protected Attributes inherited from chrono::ChBody | |
| std::shared_ptr< collision::ChCollisionModel > | collision_model |
| pointer to the collision model | |
| unsigned int | body_id |
| body-specific identifier, used for indexing (internal use only) | |
| unsigned int | body_gid |
| body-specific identifier, used for global indexing (internal use only) | |
| std::vector< std::shared_ptr< ChMarker > > | marklist |
| list of markers | |
| std::vector< std::shared_ptr< ChForce > > | forcelist |
| list of forces | |
| ChVector | gyro |
| gyroscopic torque, i.e. Qm = Wvel x (XInertia*Wvel) | |
| ChVector | Xforce |
| force acting on body, applied to COG (in absolute coords) | |
| ChVector | Xtorque |
| torque acting on body (in body relative coords) | |
| ChVector | Force_acc |
| force accumulator, applied to COG (in absolute coords) | |
| ChVector | Torque_acc |
| torque accumulator (in abs space) | |
| ChVector | Scr_force |
| script force accumulator, applied to COG (in absolute coords) | |
| ChVector | Scr_torque |
| script torque accumulator (in absolute coords) | |
| std::shared_ptr< ChMaterialSurface > | matsurface |
| data for surface contact and impact | |
| ChCoordsys | last_coll_pos |
| cached position at last collision | |
| float | density |
| used when doing the 'recompute mass' operation. | |
| ChVariablesBodyOwnMass | variables |
| interface to solver (store inertia and coordinates) | |
| float | max_speed |
| limit on linear speed | |
| float | max_wvel |
| limit on angular velocity | |
| float | sleep_time |
| float | sleep_minspeed |
| float | sleep_minwvel |
| float | sleep_starttime |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
| ChSystem * | system |
| parent system | |
| std::vector< std::shared_ptr< ChAsset > > | assets |
| set of assets | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of lagrangian multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| the time of simulation for the object | |
Member Function Documentation
◆ ArchiveIN()
|
overridevirtual |
Method to allow deserialization of transient data from archives.
Method to allow de serialization of transient data from archives.
Reimplemented from chrono::ChBody.
◆ GetFrame_REF_to_abs()
|
inlineoverridevirtual |
Get the auxiliary reference frame with respect to the absolute frame.
Note that, in general, this is different from GetFrame_COG_to_abs().
Reimplemented from chrono::ChBody.
◆ SetFrame_COG_to_REF()
| void chrono::ChBodyAuxRef::SetFrame_COG_to_REF | ( | const ChFrame<> & | mloc | ) |
Set the COG frame with respect to the auxiliary reference frame.
Note that this also moves the body absolute COG (the REF is fixed). The position of contained ChMarker objects, if any, is not changed with respect to the reference.
◆ SetFrame_REF_to_abs()
| void chrono::ChBodyAuxRef::SetFrame_REF_to_abs | ( | const ChFrame<> & | mfra | ) |
Set the auxiliary reference frame with respect to the absolute frame.
This moves the entire body; the body COG is rigidly moved as well.
◆ SetFrame_REF_to_COG()
|
inline |
Set the auxiliary reference frame with respect to the COG frame.
Note that this does not move the body absolute COG (the COG is fixed).
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyAuxRef.h
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyAuxRef.cpp
