Rigid bodies play an important role in Chrono as they represent parts of mechanisms.
You can add a rigid body using different methods:
- using chrono::ChBody directly; in this case, the body will not come with any visualization asset nor collision shape: you will need to add them in a second step;
- using 'Easy' bodies; if you need basic shapes (sphere, cylinder, box, convex hull, cluster of spheres) this is the way to go; the visualization and collision shapes are (optionally) added automatically;
Rigid bodies are not the only option. Chrono can simulate also flexible finite-elements bodies. Please refer to FEA manual for a description of the FEA capabilities.
ChBody
The most used type of rigid bodies is the ChBody. See chrono::ChBody for API details.
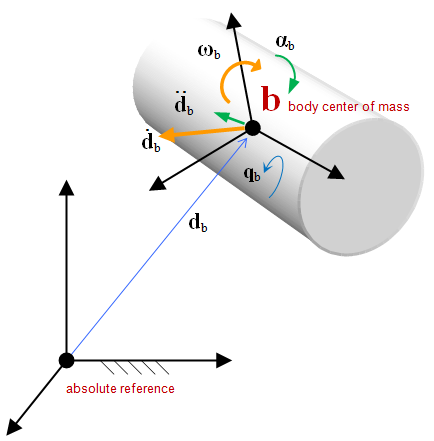
- Rigid bodies inherit (in the C++ sense) from the chrono::ChFrameMoving classes and as such they have a position, rotation, velocity, and acceleration
- The position, speed, acceleration are that of the center of mass (COG)
- They have a mass and an inertia tensor
- They can be connected by chrono::ChLink constraints
- They can participate in collisions
Creating/Setting up a ChBody object typically involves the following steps:
- Create the ChBody; auto body_b = std::make_shared<ChBody>();
- Set its mass and inertia tensor properties body_b->SetMass(10);body_b->SetInertiaXX( ChVector<>(4,4,4) );
- Set its position and its velocity, if needed body_b->SetPos( ChVector<>(0.2,0.4,2) );body_b->SetPos_dt( ChVector<>(0.1,0,0) );
- Add the body to a chrono::ChSystem my_system.Add(body_b);
- Optional: add collision shapes
- Optional: add visualization assets
ChBodyAuxRef
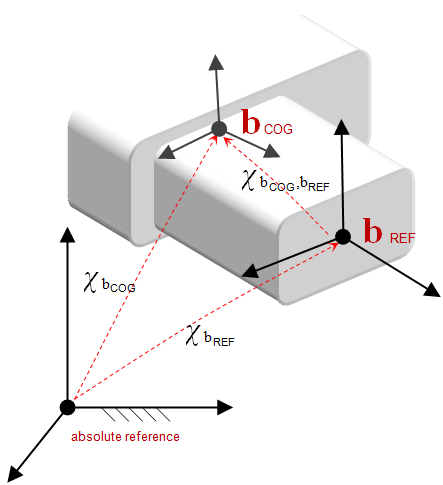
This is a special type of rigid body that has an auxiliary frame that is not necessarily coincident with the COG frame.
See chrono::ChBodyAuxRef for API details.
Remarks:
- Inherits (in the C++ sense) from ChBody
- Handy when using a COG reference frame is cumbersome and instead another reference is preferred, for instance, coming from CAD
- Calls such as mybody->GetPos(), mybody->GetRot(), mybody->GetPos_dt(), mybody->GetWvel(), etc., will report the kinematic quantities ''for the COG frame''. If you need those of the REF, do mybody->GetFrame_REF_to_abs().GetPos(), etc.
- The REF frame is used for
The following is a short example on how to set the position of the body using the REF frame:
'Easy' bodies
Chrono provides some classes that greatly facilitate the creation of bodies with basic shapes:
- chrono::ChBodyEasySphere,
- chrono::ChBodyEasyCylinder,
- chrono::ChBodyEasyBox,
- chrono::ChBodyEasyConvexHull,
- chrono::ChBodyEasyClusterOfSpheres,
The syntax differs among the different classes, but basically is of the type
For these objects:
- The mass and inertia tensor are computed from the geometry, given the density;
- Optional: a visualization asset showing the shape is added automatically;
- Optional: a collision shape is added automatically;
Since they inherit from chrono::ChBody, setting the position, velocity and any other operation can be done as in ChBody.
Other bodies
There are other classes that inherit from ChBody. They are specializations that introduce additional features. The most relevant classes in this context are:
Conveyor belt
The ChConveyor is a body that has a rectangular collision surface used in the simulation of a conveyor belt.
See chrono::ChConveyor for API details.
Examples
See:
