Description
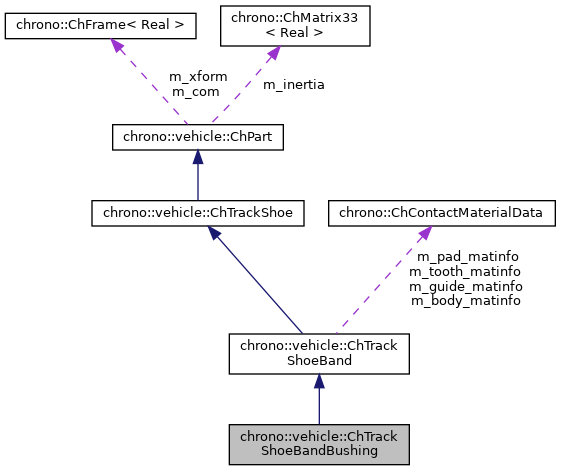
Base class for a continuous band track shoe using a bushing-based web.
(template definition)
#include <ChTrackShoeBandBushing.h>

Public Member Functions | |
| ChTrackShoeBandBushing (const std::string &name) | |
| virtual std::string | GetTemplateName () const override |
| Get the name of the vehicle subsystem template. | |
| virtual ChVector3d | GetTension () const override |
| Get track tension at this track shoe. More... | |
| virtual void | Construct (std::shared_ptr< ChChassis > chassis, const ChVector3d &location, const ChQuaternion<> &rotation) override |
| Construct this track shoe subsystem. More... | |
| virtual void | AddVisualizationAssets (VisualizationType vis) override |
| Add visualization assets for the track shoe subsystem. | |
| virtual void | RemoveVisualizationAssets () override final |
| Remove visualization assets for the track shoe subsystem. | |
 Public Member Functions inherited from chrono::vehicle::ChTrackShoeBand Public Member Functions inherited from chrono::vehicle::ChTrackShoeBand | |
| ChTrackShoeBand (const std::string &name) | |
| virtual double | GetPitch () const override |
| Return the pitch length of the track shoe. More... | |
| void | WriteTreadVisualizationMesh (const std::string &out_dir) |
| Write the procedurally-generated tread body visualization mesh to a Wavefront OBJ file. | |
| void | ExportTreadVisualizationMeshPovray (const std::string &out_dir) |
| Export the procedurally-generated tread body visualization mesh as a macro in a PovRay include file. | |
| Public Member Functions inherited from chrono::vehicle::ChTrackShoe | |
| virtual GuidePinType | GetType () const =0 |
| Return the type of track shoe (guiding pin). More... | |
| size_t | GetIndex () const |
| Get the index of this track shoe within its containing track assembly. | |
| std::shared_ptr< ChBody > | GetShoeBody () const |
| Get the shoe body. | |
| virtual double | GetHeight () const =0 |
| Return the height of the track shoe. | |
| virtual utils::ChBodyGeometry | GetGroundContactGeometry () const |
| Return contact geometry and material for interaction with terrain. | |
| void | EnableCollision (bool val) |
| Turn on/off collision flag for the shoe body. | |
| void | Initialize (std::shared_ptr< ChChassis > chassis, const ChVector3d &location, const ChQuaternion<> &rotation) |
| Initialize this track shoe subsystem. More... | |
| void | SetIndex (size_t index) |
| Set the index of this track shoe within its containing track assembly. | |
| Public Member Functions inherited from chrono::vehicle::ChPart | |
| const std::string & | GetName () const |
| Get the name identifier for this subsystem. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this subsystem. | |
| bool | IsInitialized () const |
| Return flag indicating whether or not the part is fully constructed. | |
| virtual uint16_t | GetVehicleTag () const |
| Get the tag of the associated vehicle. More... | |
| int | GetBodyTag () const |
| Get the tag for component bodies. | |
| double | GetMass () const |
| Get the subsystem mass. More... | |
| const ChFrame & | GetCOMFrame () const |
| Get the current subsystem COM frame (relative to and expressed in the subsystem's reference frame). More... | |
| const ChMatrix33 & | GetInertia () const |
| Get the current subsystem inertia (relative to the subsystem COM frame). More... | |
| const ChFrame & | GetTransform () const |
| Get the current subsystem position relative to the global frame. More... | |
| void | SetVisualizationType (VisualizationType vis) |
| Set the visualization mode for this subsystem. | |
| virtual void | SetOutput (bool state) |
| Enable/disable output for this subsystem. | |
| bool | OutputEnabled () const |
| Return the output state for this subsystem. | |
| virtual void | ExportComponentList (rapidjson::Document &jsonDocument) const |
| Export this subsystem's component list to the specified JSON object. More... | |
| virtual void | SaveCheckpoint (ChCheckpoint &database) const |
| Save states of this subsystem's components to the specified checkpoint database. More... | |
| virtual void | LoadCheckpoint (ChCheckpoint &database) |
| Load states of this subsystem's components from the specified checkpoint database. More... | |
Protected Member Functions | |
| virtual void | InitializeInertiaProperties () override |
| Initialize subsystem inertia properties. More... | |
| virtual void | UpdateInertiaProperties () override |
| Update subsystem inertia properties. More... | |
| virtual unsigned int | GetNumWebSegments () const =0 |
| Return the number of segments that the web section is broken up into. | |
| double | GetWebSegmentLength () |
| Return the length of just one of the web sections (in the X direction). | |
| std::shared_ptr< ChBody > | GetWebSegment (size_t index) |
| Return a pointer to the web segment body with the provided index. | |
| virtual std::shared_ptr< ChJoint::BushingData > | GetBushingData () const =0 |
| Return bushing stiffness and damping data. | |
| virtual void | AddWebContact (std::shared_ptr< ChBody > segment, std::shared_ptr< ChContactMaterial > web_mat) |
| Add contact geometry for a web segment body. | |
| Protected Member Functions inherited from chrono::vehicle::ChTrackShoeBand | |
| virtual double | GetTreadMass () const =0 |
| Return the mass of the tread body. | |
| virtual double | GetWebMass () const =0 |
| Return the mass of the web. More... | |
| virtual const ChVector3d & | GetTreadInertia () const =0 |
| Return the moments of inertia of the tread body. | |
| virtual const ChVector3d & | GetWebInertia () const =0 |
| Return the moments of inertia of the web. More... | |
| virtual const ChVector3d & | GetGuideBoxDimensions () const =0 |
| Return the dimensions of the contact box for the guiding pin. More... | |
| virtual double | GetGuideBoxOffsetX () const =0 |
| Return the offset (in X direction) of the guiding pin. | |
| virtual ChVector3d | GetLateralContactPoint () const override |
| Return the location of the guiding pin center, expressed in the shoe reference frame. | |
| virtual double | GetBeltWidth () const =0 |
| Return the width of the CB track belt (in the Y direction) | |
| virtual double | GetToothTipLength () const =0 |
| Return the length of the flat tip of the tread tooth tip (in the X direction) | |
| virtual double | GetToothBaseLength () const =0 |
| Return the length of the base of the tread tooth (in the X direction) where the tooth circular profile ends. | |
| virtual double | GetToothWidth () const =0 |
| Return the width of the one of the tooth profile sections of the tread tooth (in the Y direction) | |
| virtual double | GetToothHeight () const =0 |
| Return the height from the base to the tip of the tread tooth profile (in the Z direction) | |
| virtual double | GetToothArcRadius () const =0 |
| Return the radius of the tooth profile arc that connects the tooth tip and base lines. | |
| virtual double | GetWebLength () const =0 |
| Return the combined length of all of the web sections (in the X direction) | |
| virtual double | GetWebThickness () const =0 |
| Return the thickness of the web section (in the Z direction) | |
| virtual double | GetTreadLength () const =0 |
| Return the length of the tread below the web area (in the X direction, tread pad for ground contact) | |
| virtual double | GetTreadThickness () const =0 |
| Return the thickness of the tread below the web area (tread pad for ground contact) | |
| virtual const std::string & | GetTreadVisualizationMeshName () const =0 |
| Specify the name assigned to the procedurally-generated tread body visualization mesh. | |
| void | AddShoeContact (ChContactMethod contact_method) |
| Add contact geometry for the tread body. More... | |
| void | AddShoeVisualization () |
| Add visualization of the tread body, based on primitives corresponding to the contact shapes. More... | |
| Protected Member Functions inherited from chrono::vehicle::ChTrackShoe | |
| ChTrackShoe (const std::string &name) | |
| Construct a track shoe subsystem with given name. | |
| Protected Member Functions inherited from chrono::vehicle::ChPart | |
| ChPart (const std::string &name) | |
| Construct a vehicle subsystem with the specified name. | |
| void | AddMass (double &mass) |
| Add this subsystem's mass. More... | |
| void | AddInertiaProperties (ChVector3d &com, ChMatrix33<> &inertia) |
| Add this subsystem's inertia properties. More... | |
| virtual void | Create (const rapidjson::Document &d) |
| Create a vehicle subsystem from JSON data. More... | |
| void | Initialize () |
| Initialize the part (populate components and mark as initialized). More... | |
| const ChAssembly::Components & | GetComponents () const |
| Get reference to the components of the vehicle part. | |
| virtual std::vector< std::shared_ptr< ChBody > > | GetBodyList () const |
| Get the list of bodies. | |
| void | ExportBodyList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChBody >> bodies) const |
| Export the list of bodies to the specified JSON document. | |
| void | ExportShaftList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaft >> shafts) const |
| Export the list of shafts to the specified JSON document. | |
| void | ExportJointList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLink >> joints) const |
| Export the list of joints to the specified JSON document. | |
| void | ExportCouplesList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftsCouple >> couples) const |
| Export the list of shaft couples to the specified JSON document. | |
| void | ExportShaftBodyConstraintList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftBodyRotation >> rot_constraints, std::vector< std::shared_ptr< ChShaftBodyTranslation >> trans_constraints) const |
| Export the list of shaft-body constraints to the specified JSON document. | |
| void | ExportMarkerList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChMarker >> markers) const |
| Export the list of markers to the specified JSON document. | |
| void | ExportLinSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkTSDA >> springs) const |
| Export the list of translational springs to the specified JSON document. | |
| void | ExportRotSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkRSDA >> springs) const |
| Export the list of rotational springs to the specified JSON document. | |
| void | ExportBodyLoadList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLoadBodyBody >> loads) const |
| Export the list of body-body loads to the specified JSON document. | |
| void | ExportLinMotorList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkMotorLinear >> loads) const |
| Export the list of linear motors to the specified JSON document. | |
| void | ExportRotMotorList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkMotorRotation >> loads) const |
| Export the list of rotational motors to the specified JSON document. | |
Friends | |
| class | ChTrackAssemblyBandBushing |
Additional Inherited Members | |
| Static Public Member Functions inherited from chrono::vehicle::ChPart | |
| static ChMatrix33 | TransformInertiaMatrix (const ChVector3d &moments, const ChVector3d &products, const ChMatrix33<> &vehicle_rot, const ChMatrix33<> &body_rot) |
| Utility function for transforming inertia tensors between centroidal frames. More... | |
| Static Protected Member Functions inherited from chrono::vehicle::ChTrackShoeBand | |
| static ChColor | GetColor (size_t index) |
| Get index-specific color (for visualization) | |
| Static Protected Member Functions inherited from chrono::vehicle::ChPart | |
| static void | RemoveVisualizationAssets (std::shared_ptr< ChPhysicsItem > item) |
| Erase all visual shapes from the visual model associated with the specified physics item (if any). | |
| static void | RemoveVisualizationAsset (std::shared_ptr< ChPhysicsItem > item, std::shared_ptr< ChVisualShape > shape) |
| Erase the given shape from the visual model associated with the specified physics item (if any). | |
| Protected Attributes inherited from chrono::vehicle::ChTrackShoeBand | |
| ChContactMaterialData | m_tooth_matinfo |
| data for contact material for teeth (sprocket interaction) | |
| ChContactMaterialData | m_body_matinfo |
| date for contact material for main body (wheel interaction) | |
| ChContactMaterialData | m_pad_matinfo |
| data for contact material for pad (ground interaction) | |
| ChContactMaterialData | m_guide_matinfo |
| date for contact material for guide pin (wheel interaction) | |
| Protected Attributes inherited from chrono::vehicle::ChTrackShoe | |
| size_t | m_index |
| index of this track shoe within its containing track assembly | |
| std::shared_ptr< ChBody > | m_shoe |
| handle to the shoe body | |
| Protected Attributes inherited from chrono::vehicle::ChPart | |
| std::string | m_name |
| subsystem name | |
| bool | m_output |
| specifies whether or not output is generated for this subsystem | |
| std::shared_ptr< ChPart > | m_parent |
| parent subsystem (empty if parent is vehicle) | |
| double | m_mass |
| subsystem mass | |
| ChMatrix33 | m_inertia |
| inertia tensor (relative to subsystem COM) | |
| ChFrame | m_com |
| COM frame (relative to subsystem reference frame) | |
| ChFrame | m_xform |
| subsystem frame expressed in the global frame | |
| int | m_obj_tag |
| tag for part objects | |
| ChAssembly::Components | m_components |
Constructor & Destructor Documentation
◆ ChTrackShoeBandBushing()
| chrono::vehicle::ChTrackShoeBandBushing::ChTrackShoeBandBushing | ( | const std::string & | name | ) |
- Parameters
-
[in] name [in] name of the subsystem
Member Function Documentation
◆ Construct()
|
overridevirtual |
Construct this track shoe subsystem.
The track shoe is created within the specified system and initialized at the specified location and orientation (expressed in the global frame). This version initializes the bodies of a CB rigid-link track shoe such that the center of the track shoe subsystem is at the specified location and all bodies have the specified orientation.
- Parameters
-
[in] chassis [in] chassis body [in] location [in] location relative to the chassis frame [in] rotation [in] orientation relative to the chassis frame
Reimplemented from chrono::vehicle::ChTrackShoeBand.
◆ GetTension()
|
overridevirtual |
Get track tension at this track shoe.
Return is the force due to the connections of this track shoe, expressed in the track shoe reference frame.
Implements chrono::vehicle::ChTrackShoe.
◆ InitializeInertiaProperties()
|
overrideprotectedvirtual |
Initialize subsystem inertia properties.
Derived classes must override this function and set the subsystem mass (m_mass) and, if constant, the subsystem COM frame and its inertia tensor. This function is called during initialization of the vehicle system.
Implements chrono::vehicle::ChPart.
◆ UpdateInertiaProperties()
|
overrideprotectedvirtual |
Update subsystem inertia properties.
Derived classes must override this function and set the global subsystem transform (m_xform) and, unless constant, the subsystem COM frame (m_com) and its inertia tensor (m_inertia). Calculate the current inertia properties and global frame of this subsystem. This function is called every time the state of the vehicle system is advanced in time.
Implements chrono::vehicle::ChPart.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/tracked_vehicle/track_shoe/ChTrackShoeBandBushing.h
- /builds/uwsbel/chrono/src/chrono_vehicle/tracked_vehicle/track_shoe/ChTrackShoeBandBushing.cpp
