Description
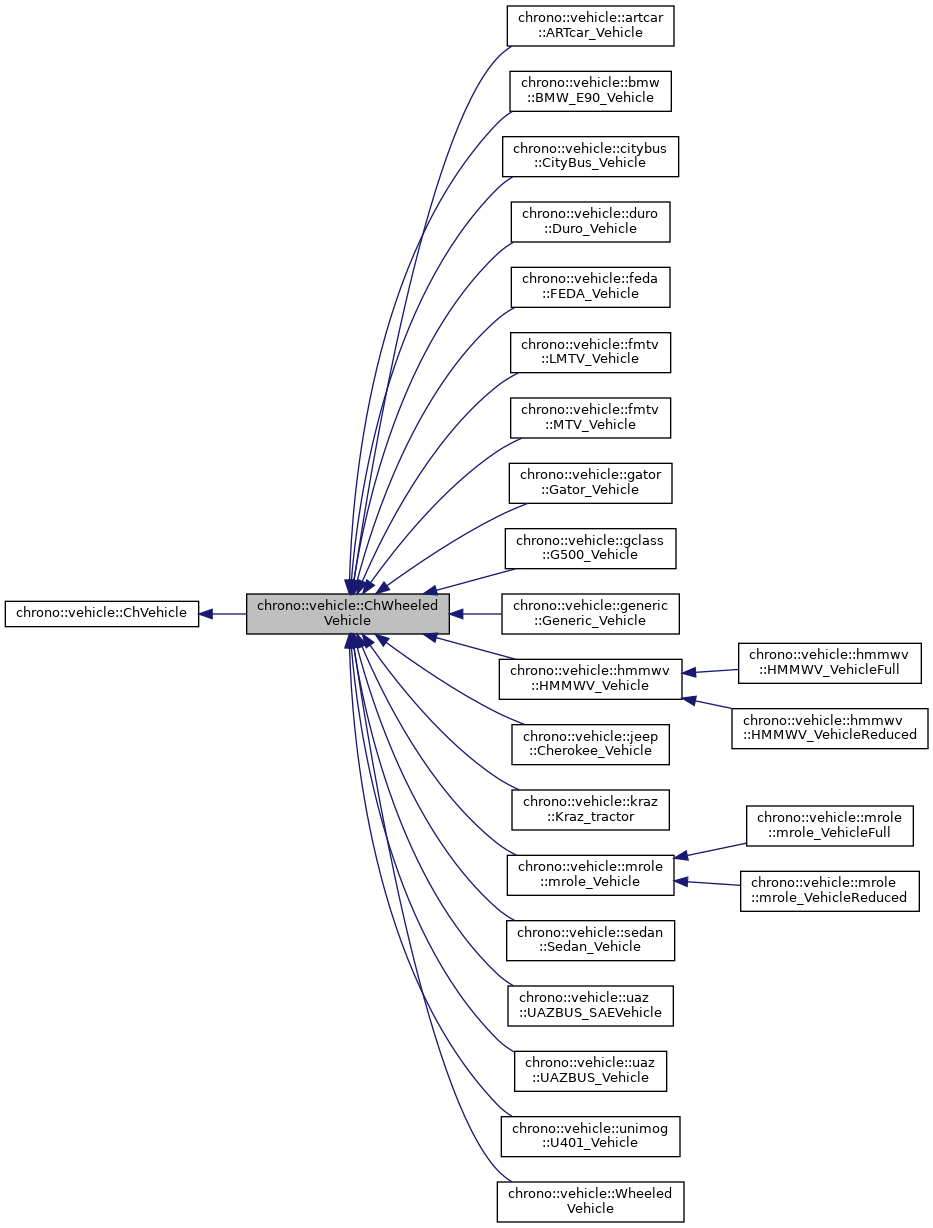
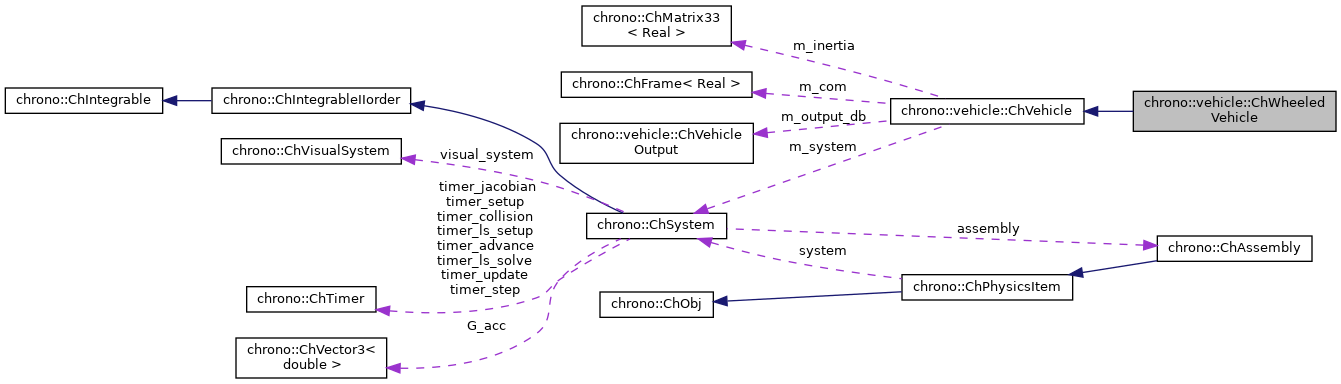
Base class for chrono wheeled vehicle systems.
This class provides the interface between the vehicle system and other systems (tires, driver, etc.). The reference frame for a vehicle follows the ISO standard: Z-axis up, X-axis pointing forward, and Y-axis towards the left of the vehicle.
#include <ChWheeledVehicle.h>
Public Member Functions | |
| virtual | ~ChWheeledVehicle () |
| Destructor. | |
| virtual std::string | GetTemplateName () const override |
| Get the name of the vehicle system template. | |
| const ChAxleList & | GetAxles () const |
| Get all vehicle axle subsystems. | |
| std::shared_ptr< ChAxle > | GetAxle (int id) const |
| Get the specified vehicle axle subsystem. | |
| std::shared_ptr< ChSuspension > | GetSuspension (int id) const |
| Get the specified suspension subsystem. | |
| const ChSteeringList & | GetSteerings () const |
| Get all vehicle steering subsystems. | |
| std::shared_ptr< ChSteering > | GetSteering (int id) const |
| Get the specified steering subsystem. | |
| std::shared_ptr< ChWheel > | GetWheel (int axle, VehicleSide side, WheelLocation location=SINGLE) const |
| Get the specified vehicle wheel, by specifying the axle, side, and wheel location. More... | |
| std::shared_ptr< ChTire > | GetTire (int axle, VehicleSide side, WheelLocation location=SINGLE) const |
| Get the specified vehicle tire, by specifying the axle, side, and wheel location. More... | |
| std::shared_ptr< ChBrake > | GetBrake (int axle, VehicleSide side) const |
| Get the specified vehicle brake, by specifying the axle and side. More... | |
| std::shared_ptr< ChDrivelineWV > | GetDriveline () const |
| Get a handle to the vehicle's driveline subsystem. | |
| std::shared_ptr< ChSubchassis > | GetSubchassis (int id) const |
| Get the subchassis system (if none present, returns an empty pointer). | |
| virtual unsigned int | GetNumberAxles () const =0 |
| Return the number of axles for this vehicle. | |
| const ChVector3d & | GetSpindlePos (int axle, VehicleSide side) const |
| Get the global location of the specified spindle. | |
| ChQuaternion | GetSpindleRot (int axle, VehicleSide side) const |
| Get the orientation of the specified spindle. More... | |
| const ChVector3d & | GetSpindleLinVel (int axle, VehicleSide side) const |
| Get the linear velocity of the specified spindle. More... | |
| ChVector3d | GetSpindleAngVel (int axle, VehicleSide side) const |
| Get the angular velocity of the specified spindle. More... | |
| double | GetSpindleOmega (int axle, VehicleSide side) const |
| Get the angular speed of the specified spindle. More... | |
| double | GetSteeringAngle (int axle, VehicleSide side) const |
| Get the current steering angle of the specified wheel/spindle. More... | |
| virtual double | GetWheelbase () const =0 |
| Return the vehicle wheelbase. | |
| double | GetWheeltrack (int id) const |
| Return the vehicle wheel track of the specified suspension subsystem. | |
| virtual double | GetMinTurningRadius () const |
| Return the minimum turning radius. More... | |
| virtual double | GetMaxSteeringAngle () const |
| Return the maximum steering angle. More... | |
| void | SetSubchassisVisualizationType (VisualizationType vis) |
| Set visualization mode for the sub-chassis subsystems. | |
| void | SetSuspensionVisualizationType (VisualizationType vis) |
| Set visualization type for the suspension subsystems. More... | |
| void | SetSteeringVisualizationType (VisualizationType vis) |
| Set visualization type for the steering subsystems. More... | |
| void | SetWheelVisualizationType (VisualizationType vis) |
| Set visualization type for the wheel subsystems. More... | |
| void | SetTireVisualizationType (VisualizationType vis) |
| Set visualization type for the tire subsystems. More... | |
| void | SetWheelCollide (bool state) |
| Enable/disable collision for the wheel subsystems. More... | |
| virtual void | SetChassisVehicleCollide (bool state) override |
| Enable/disable collision between the chassis and all other vehicle subsystems. More... | |
| void | SetAxleOutput (int id, bool state) |
| Enable/disable output from the axle subsystems. More... | |
| void | SetSteeringOutput (int id, bool state) |
| Enable/disable output from the steering subsystems. More... | |
| void | SetSubchassisOutput (int id, bool state) |
| Enable/disable output from the subchassis subsystems. More... | |
| void | SetDrivelineOutput (bool state) |
| Enable/disable output from the driveline subsystem. More... | |
| void | InitializeTire (std::shared_ptr< ChTire > tire, std::shared_ptr< ChWheel > wheel, VisualizationType tire_vis=VisualizationType::PRIMITIVES, ChTire::CollisionType tire_coll=ChTire::CollisionType::SINGLE_POINT) |
| Initialize the given tire and attach it to the specified wheel. More... | |
| virtual void | InitializeInertiaProperties () override final |
| Calculate total vehicle mass. More... | |
| virtual void | Synchronize (double time, const DriverInputs &driver_inputs) override |
| Update the state of this vehicle at the current time. More... | |
| virtual void | Synchronize (double time, const DriverInputs &driver_inputs, const ChTerrain &terrain) override |
| Update the state of this vehicle at the current time. More... | |
| virtual void | Advance (double step, bool do_collision=true) override final |
| Advance the state of this vehicle by the specified time step. More... | |
| void | LockAxleDifferential (int axle, bool lock) |
| Lock/unlock the differential on the specified axle. More... | |
| void | LockCentralDifferential (int which, bool lock) |
| Lock/unlock the specified central differential. More... | |
| void | EnableBrakeLocking (bool lock) |
| Enable/disable brake locking. More... | |
| void | ApplyParkingBrake (bool lock) |
| Engage/disengage parking brake. More... | |
| bool | ParkingBrake () const |
| Returns the state of the parking brake (true if engaged, false otherwise). | |
| void | DisconnectDriveline () |
| Disconnect driveline. More... | |
| virtual void | LogConstraintViolations () override |
| Log current constraint violations. | |
| void | LogSubsystemTypes (std::ostream &os=std::cout) |
| Log the types (template names) of current vehicle subsystems. | |
| virtual std::vector< std::shared_ptr< ChBody > > | GetBodyList () const override |
| Return a list with all bodies in the vehicle system. | |
| virtual std::string | ExportComponentList () const override |
| Return a JSON string with information on all modeling components in the vehicle system. More... | |
| virtual void | ExportComponentList (const std::string &filename) const override |
| Write a JSON-format file with information on all modeling components in the vehicle system. More... | |
 Public Member Functions inherited from chrono::vehicle::ChVehicle Public Member Functions inherited from chrono::vehicle::ChVehicle | |
| virtual | ~ChVehicle () |
| Destructor. | |
| const std::string & | GetName () const |
| Get the name identifier for this vehicle. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this vehicle. | |
| uint16_t | GetVehicleTag () const |
| Get vehicle tag. More... | |
| ChSystem * | GetSystem () |
| Get a pointer to the Chrono ChSystem. | |
| double | GetChTime () const |
| Get the current simulation time of the underlying ChSystem. | |
| std::shared_ptr< ChChassis > | GetChassis () const |
| Get a handle to the vehicle's main chassis subsystem. | |
| std::shared_ptr< ChChassisRear > | GetChassisRear (int id) const |
| Get the specified rear chassis subsystem. | |
| std::shared_ptr< ChChassisConnector > | GetChassisConnector (int id) const |
| Get a handle to the specified chassis connector. | |
| std::shared_ptr< ChBodyAuxRef > | GetChassisBody () const |
| Get a handle to the vehicle's chassis body. | |
| std::shared_ptr< ChBodyAuxRef > | GetChassisRearBody (int id) const |
| Get a handle to the specified rear chassis body. | |
| std::shared_ptr< ChPowertrainAssembly > | GetPowertrainAssembly () const |
| Get the powertrain attached to this vehicle. | |
| std::shared_ptr< ChEngine > | GetEngine () const |
| Get the engine in the powertrain assembly (if a powertrain is attached). | |
| std::shared_ptr< ChTransmission > | GetTransmission () const |
| Get the transmission in the powertrain assembly (if a powertrain is attached). | |
| double | GetMass () const |
| Get the vehicle total mass. More... | |
| const ChFrame & | GetCOMFrame () const |
| Get the current vehicle COM frame (relative to and expressed in the vehicle reference frame). More... | |
| const ChMatrix33 & | GetInertia () const |
| Get the current vehicle inertia (relative to the vehicle COM frame). | |
| const ChFrameMoving & | GetRefFrame () const |
| Get the current vehicle reference frame. More... | |
| const ChFrame & | GetTransform () const |
| Get the current vehicle transform relative to the global frame. More... | |
| const ChVector3d & | GetPos () const |
| Get the vehicle global location. More... | |
| ChQuaternion | GetRot () const |
| Get the vehicle orientation. More... | |
| double | GetRoll () const |
| Get vehicle roll angle. More... | |
| double | GetPitch () const |
| Get vehicle pitch angle. More... | |
| double | GetRoll (const ChTerrain &terrain) const |
| Get vehicle roll angle (relative to local terrain). More... | |
| double | GetPitch (const ChTerrain &terrain) const |
| Get vehicle pitch angle (relative to local terrain). More... | |
| const ChVector3d & | GetLinearVelocity () const |
| Get the vehicle linear velocity. More... | |
| ChVector3d | GetAngularVelocity () const |
| Get the vehicle angular velocity. More... | |
| double | GetSpeed () const |
| Get the vehicle speed (velocity component in the vehicle forward direction). More... | |
| double | GetSlipAngle () const |
| Get the vehicle slip angle. More... | |
| double | GetRollRate () const |
| Get the vehicle roll rate. More... | |
| double | GetPitchRate () const |
| Get the vehicle pitch rate. More... | |
| double | GetYawRate () const |
| Get the vehicle yaw rate. More... | |
| double | GetTurnRate () const |
| Get the vehicle turn rate. More... | |
| ChVector3d | GetPointLocation (const ChVector3d &locpos) const |
| Get the global position of the specified point. More... | |
| ChVector3d | GetPointVelocity (const ChVector3d &locpos) const |
| Get the global velocity of the specified point. More... | |
| ChVector3d | GetPointAcceleration (const ChVector3d &locpos) const |
| Get the acceleration at the specified point. More... | |
| ChVector3d | GetDriverPos () const |
| Get the global location of the driver. | |
| void | EnableRealtime (bool val) |
| Enable/disable soft real-time (default: false). More... | |
| double | GetRTF () const |
| Get current estimated RTF (real time factor). More... | |
| double | GetStepRTF () const |
| Get current estimated step RTF (real time factor). More... | |
| void | SetCollisionSystemType (ChCollisionSystem::Type collsys_type) |
| Change the default collision detection system. More... | |
| void | SetOutput (ChOutput::Format format, ChOutput::Mode mode, const std::string &out_dir, const std::string &out_name, double output_step) |
| Enable output for this vehicle system. More... | |
| virtual void | Initialize (const ChCoordsys<> &chassisPos, double chassisFwdVel=0) |
| Initialize this vehicle at the specified global location and orientation. More... | |
| void | InitializePowertrain (std::shared_ptr< ChPowertrainAssembly > powertrain) |
| Initialize the given powertrain assembly and associate it to this vehicle. More... | |
| void | SetChassisVisualizationType (VisualizationType vis) |
| Set visualization mode for the chassis subsystem. | |
| void | SetChassisRearVisualizationType (VisualizationType vis) |
| Set visualization mode for the rear chassis subsystems. | |
| void | SetChassisCollide (bool state) |
| Enable/disable collision for the chassis subsystem. More... | |
| void | SetChassisOutput (bool state) |
| Enable/disable output from the chassis subsystem. | |
| void | Relocate (const ChVector2d &xy_pos, double yaw_angle) |
| Relocate vehicle at given x-y location and reorient with given yaw angle. More... | |
| bool | HasBushings () const |
| Return true if the vehicle model contains bushings. | |
| void | WriteCheckpoint (ChCheckpoint::Format format, const std::string &filename) const |
| Checkpoint states of all modeling components in the vehicle system. More... | |
| void | ReadCheckpoint (ChCheckpoint::Format format, const std::string &filename) |
| Initialize the vehicle system from the given checkpoint file. More... | |
Protected Member Functions | |
| ChWheeledVehicle (const std::string &name, ChContactMethod contact_method=ChContactMethod::NSC) | |
| Construct a vehicle system with a default ChSystem. More... | |
| ChWheeledVehicle (const std::string &name, ChSystem *system) | |
| Construct a vehicle system using the specified ChSystem. More... | |
| virtual void | UpdateInertiaProperties () override final |
| Calculate current vehicle inertia properties. More... | |
| virtual void | InitializeOutput () override |
| Initialize output for the wheeled vehicle subsystems. | |
| virtual void | WriteOutput (int frame, double time) const override |
| Write output data for all modeling components in the wheeled vehicle system. | |
| virtual void | SaveCheckpoint (ChCheckpoint &database) const override |
| Checkpoint states of all modeling components in the wheeled vehicle system. | |
| virtual void | LoadCheckpoint (ChCheckpoint &database) override |
| Load states of all modeling components in the vehicle system from the specified checkpoint database. | |
| Protected Member Functions inherited from chrono::vehicle::ChVehicle | |
| ChVehicle (const std::string &name, ChContactMethod contact_method=ChContactMethod::NSC) | |
| Construct a vehicle system with an underlying ChSystem. More... | |
| ChVehicle (const std::string &name, ChSystem *system) | |
| Construct a vehicle system using the specified ChSystem. More... | |
| void | SetSystem (ChSystem *sys) |
| Set the associated Chrono system. | |
Protected Attributes | |
| ChSubchassisList | m_subchassis |
| list of subchassis subsystems (typically empty) | |
| ChAxleList | m_axles |
| list of axle subsystems | |
| ChSteeringList | m_steerings |
| list of steering subsystems | |
| std::shared_ptr< ChDrivelineWV > | m_driveline |
| driveline subsystem | |
| bool | m_parking_on |
| indicates whether or not parking brake is engaged | |
| OutputData | m_out_chassis |
| OutputData | m_out_driveline |
| std::vector< OutputData > | m_out_chassis_rear |
| std::vector< OutputData > | m_out_subchassis |
| std::vector< OutputData > | m_out_steering |
| std::vector< OutputData > | m_out_axles |
| Protected Attributes inherited from chrono::vehicle::ChVehicle | |
| std::string | m_name |
| vehicle name | |
| ChSystem * | m_system |
| pointer to the Chrono system | |
| bool | m_ownsSystem |
| true if system created at construction | |
| double | m_mass |
| total vehicle mass | |
| ChFrame | m_com |
| current vehicle COM (relative to the vehicle reference frame) | |
| ChMatrix33 | m_inertia |
| current total vehicle inertia (Relative to the vehicle COM frame) | |
| bool | m_output |
| write output from vehicle subsystems | |
| bool | m_output_initialized |
| output initialization flag | |
| ChOutput::Format | m_out_format |
| output format | |
| ChOutput::Mode | m_out_mode |
| output mode | |
| std::string | m_out_dir |
| output directory name | |
| std::string | m_out_name |
| rootname of output files | |
| double | m_out_step |
| output time step | |
| double | m_next_out_time |
| time for next output | |
| int | m_out_frame |
| current output frame | |
| std::shared_ptr< ChChassis > | m_chassis |
| handle to the main chassis subsystem | |
| ChChassisRearList | m_chassis_rear |
| list of rear chassis subsystems (can be empty) | |
| ChChassisConnectorList | m_chassis_connectors |
| list of chassis connector (must match m_chassis_rear) | |
| std::shared_ptr< ChPowertrainAssembly > | m_powertrain_assembly |
| associated powertrain system | |
Additional Inherited Members | |
| Static Protected Member Functions inherited from chrono::vehicle::ChVehicle | |
| template<typename T > | |
| static bool | AnyOutput (const std::vector< std::shared_ptr< T >> &list) |
| Utility function for testing if any subsystem in a list generates output. | |
Constructor & Destructor Documentation
◆ ChWheeledVehicle() [1/2]
|
protected |
Construct a vehicle system with a default ChSystem.
- Parameters
-
[in] name [in] vehicle name [in] contact_method [in] contact method
◆ ChWheeledVehicle() [2/2]
|
protected |
Construct a vehicle system using the specified ChSystem.
- Parameters
-
[in] name [in] vehicle name [in] system [in] containing mechanical system
Member Function Documentation
◆ Advance()
|
finaloverridevirtual |
Advance the state of this vehicle by the specified time step.
In addition to advancing the state of the multibody system (if the vehicle owns the underlying system), this function also advances the state of the associated powertrain and the states of all associated tires.
Reimplemented from chrono::vehicle::ChVehicle.
◆ ApplyParkingBrake()
| void chrono::vehicle::ChWheeledVehicle::ApplyParkingBrake | ( | bool | lock | ) |
Engage/disengage parking brake.
If engaged and supported by the concrete brake type on this vehicle, this locks all vehicle brakes.
◆ DisconnectDriveline()
| void chrono::vehicle::ChWheeledVehicle::DisconnectDriveline | ( | ) |
Disconnect driveline.
This function has no effect if called before vehicle initialization.
◆ EnableBrakeLocking()
| void chrono::vehicle::ChWheeledVehicle::EnableBrakeLocking | ( | bool | lock | ) |
Enable/disable brake locking.
If supported by the concrete brake type used on this vehicle, the brakes will be locked for large enough braking inputs. By default, brakes do not lock.
◆ ExportComponentList() [1/2]
|
overridevirtual |
Return a JSON string with information on all modeling components in the vehicle system.
These include bodies, shafts, joints, spring-damper elements, markers, etc.
Reimplemented from chrono::vehicle::ChVehicle.
◆ ExportComponentList() [2/2]
|
overridevirtual |
Write a JSON-format file with information on all modeling components in the vehicle system.
These include bodies, shafts, joints, spring-damper elements, markers, etc.
Reimplemented from chrono::vehicle::ChVehicle.
◆ GetBrake()
| std::shared_ptr< ChBrake > chrono::vehicle::ChWheeledVehicle::GetBrake | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the specified vehicle brake, by specifying the axle and side.
Axles are assumed to be indexed starting from the front of the vehicle.
◆ GetMaxSteeringAngle()
|
virtual |
Return the maximum steering angle.
This default implementation estimates the maximum steering angle based on a bicycle model and the vehicle minimum turning radius.
Reimplemented in chrono::vehicle::bmw::BMW_E90_Vehicle, chrono::vehicle::generic::Generic_Vehicle, chrono::vehicle::uaz::UAZBUS_SAEVehicle, chrono::vehicle::feda::FEDA_Vehicle, chrono::vehicle::artcar::ARTcar_Vehicle, chrono::vehicle::duro::Duro_Vehicle, chrono::vehicle::gator::Gator_Vehicle, chrono::vehicle::gclass::G500_Vehicle, chrono::vehicle::jeep::Cherokee_Vehicle, chrono::vehicle::fmtv::LMTV_Vehicle, chrono::vehicle::fmtv::MTV_Vehicle, chrono::vehicle::uaz::UAZBUS_Vehicle, chrono::vehicle::unimog::U401_Vehicle, chrono::vehicle::WheeledVehicle, chrono::vehicle::sedan::Sedan_Vehicle, chrono::vehicle::citybus::CityBus_Vehicle, chrono::vehicle::hmmwv::HMMWV_Vehicle, chrono::vehicle::kraz::Kraz_tractor, and chrono::vehicle::mrole::mrole_Vehicle.
◆ GetMinTurningRadius()
|
inlinevirtual |
Return the minimum turning radius.
A concrete wheeled vehicle class should override the default value (20 m).
Reimplemented in chrono::vehicle::bmw::BMW_E90_Vehicle, chrono::vehicle::generic::Generic_Vehicle, chrono::vehicle::uaz::UAZBUS_SAEVehicle, chrono::vehicle::feda::FEDA_Vehicle, chrono::vehicle::artcar::ARTcar_Vehicle, chrono::vehicle::duro::Duro_Vehicle, chrono::vehicle::gator::Gator_Vehicle, chrono::vehicle::gclass::G500_Vehicle, chrono::vehicle::jeep::Cherokee_Vehicle, chrono::vehicle::fmtv::LMTV_Vehicle, chrono::vehicle::fmtv::MTV_Vehicle, chrono::vehicle::uaz::UAZBUS_Vehicle, chrono::vehicle::unimog::U401_Vehicle, chrono::vehicle::WheeledVehicle, chrono::vehicle::sedan::Sedan_Vehicle, chrono::vehicle::citybus::CityBus_Vehicle, chrono::vehicle::hmmwv::HMMWV_Vehicle, chrono::vehicle::kraz::Kraz_tractor, and chrono::vehicle::mrole::mrole_Vehicle.
◆ GetSpindleAngVel()
| ChVector3d chrono::vehicle::ChWheeledVehicle::GetSpindleAngVel | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the angular velocity of the specified spindle.
Return the angular velocity of the spindle frame, expressed in the global reference frame.
◆ GetSpindleLinVel()
| const ChVector3d & chrono::vehicle::ChWheeledVehicle::GetSpindleLinVel | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the linear velocity of the specified spindle.
Return the linear velocity of the spindle center, expressed in the global reference frame.
◆ GetSpindleOmega()
| double chrono::vehicle::ChWheeledVehicle::GetSpindleOmega | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the angular speed of the specified spindle.
This is the angular speed of the spindle shaft.
◆ GetSpindleRot()
| ChQuaternion chrono::vehicle::ChWheeledVehicle::GetSpindleRot | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the orientation of the specified spindle.
Return a quaternion representing a rotation with respect to the global reference frame.
◆ GetSteeringAngle()
| double chrono::vehicle::ChWheeledVehicle::GetSteeringAngle | ( | int | axle, |
| VehicleSide | side | ||
| ) | const |
Get the current steering angle of the specified wheel/spindle.
The return angle (given in radians) is positive for a turn to the left.
◆ GetTire()
| std::shared_ptr< ChTire > chrono::vehicle::ChWheeledVehicle::GetTire | ( | int | axle, |
| VehicleSide | side, | ||
| WheelLocation | location = SINGLE |
||
| ) | const |
Get the specified vehicle tire, by specifying the axle, side, and wheel location.
Axles are assumed to be indexed starting from the front of the vehicle. On each axle, wheels are assumed to be ordered from inner to outer wheels, first left then right: for a single-wheel axle the order is left wheel, right wheel; for a double-wheel axle, the order is inner left, inner right, outer left, outer right.
◆ GetWheel()
| std::shared_ptr< ChWheel > chrono::vehicle::ChWheeledVehicle::GetWheel | ( | int | axle, |
| VehicleSide | side, | ||
| WheelLocation | location = SINGLE |
||
| ) | const |
Get the specified vehicle wheel, by specifying the axle, side, and wheel location.
Axles are assumed to be indexed starting from the front of the vehicle. On each axle, wheels are assumed to be ordered from inner to outer wheels, first left then right: for a single-wheel axle the order is left wheel, right wheel; for a double-wheel axle, the order is inner left, inner right, outer left, outer right.
◆ InitializeInertiaProperties()
|
finaloverridevirtual |
Calculate total vehicle mass.
This function is called at the end of the vehicle initialization, but can also be called explicitly.
Implements chrono::vehicle::ChVehicle.
◆ InitializeTire()
| void chrono::vehicle::ChWheeledVehicle::InitializeTire | ( | std::shared_ptr< ChTire > | tire, |
| std::shared_ptr< ChWheel > | wheel, | ||
| VisualizationType | tire_vis = VisualizationType::PRIMITIVES, |
||
| ChTire::CollisionType | tire_coll = ChTire::CollisionType::SINGLE_POINT |
||
| ) |
Initialize the given tire and attach it to the specified wheel.
Optionally, specify tire visualization mode and tire-terrain collision detection method. This function should be called only after vehicle initialization.
◆ LockAxleDifferential()
| void chrono::vehicle::ChWheeledVehicle::LockAxleDifferential | ( | int | axle, |
| bool | lock | ||
| ) |
Lock/unlock the differential on the specified axle.
By convention, axles are counted front to back, starting with index 0.
◆ LockCentralDifferential()
| void chrono::vehicle::ChWheeledVehicle::LockCentralDifferential | ( | int | which, |
| bool | lock | ||
| ) |
Lock/unlock the specified central differential.
By convention, central differentials are counted from front to back, starting with index 0 for the central differential between the two front-most axles.
◆ SetAxleOutput()
| void chrono::vehicle::ChWheeledVehicle::SetAxleOutput | ( | int | id, |
| bool | state | ||
| ) |
Enable/disable output from the axle subsystems.
See also ChVehicle::SetOutput.
◆ SetChassisVehicleCollide()
|
overridevirtual |
Enable/disable collision between the chassis and all other vehicle subsystems.
This only controls collisions between the chassis and the wheel/tire systems.
Reimplemented from chrono::vehicle::ChVehicle.
◆ SetDrivelineOutput()
| void chrono::vehicle::ChWheeledVehicle::SetDrivelineOutput | ( | bool | state | ) |
Enable/disable output from the driveline subsystem.
See also ChVehicle::SetOutput.
◆ SetSteeringOutput()
| void chrono::vehicle::ChWheeledVehicle::SetSteeringOutput | ( | int | id, |
| bool | state | ||
| ) |
Enable/disable output from the steering subsystems.
See also ChVehicle::SetOutput.
◆ SetSteeringVisualizationType()
| void chrono::vehicle::ChWheeledVehicle::SetSteeringVisualizationType | ( | VisualizationType | vis | ) |
Set visualization type for the steering subsystems.
This function should be called only after vehicle initialization.
◆ SetSubchassisOutput()
| void chrono::vehicle::ChWheeledVehicle::SetSubchassisOutput | ( | int | id, |
| bool | state | ||
| ) |
Enable/disable output from the subchassis subsystems.
See also ChVehicle::SetOutput.
◆ SetSuspensionVisualizationType()
| void chrono::vehicle::ChWheeledVehicle::SetSuspensionVisualizationType | ( | VisualizationType | vis | ) |
Set visualization type for the suspension subsystems.
This function should be called only after vehicle initialization.
◆ SetTireVisualizationType()
| void chrono::vehicle::ChWheeledVehicle::SetTireVisualizationType | ( | VisualizationType | vis | ) |
Set visualization type for the tire subsystems.
This function should be called only after vehicle and tire initialization.
◆ SetWheelCollide()
| void chrono::vehicle::ChWheeledVehicle::SetWheelCollide | ( | bool | state | ) |
Enable/disable collision for the wheel subsystems.
This function controls contact of the wheels with all other collision shapes in the simulation.
◆ SetWheelVisualizationType()
| void chrono::vehicle::ChWheeledVehicle::SetWheelVisualizationType | ( | VisualizationType | vis | ) |
Set visualization type for the wheel subsystems.
This function should be called only after vehicle initialization.
◆ Synchronize() [1/2]
|
overridevirtual |
Update the state of this vehicle at the current time.
The vehicle system is provided the current driver inputs (throttle between 0 and 1, steering between -1 and +1, braking between 0 and 1). This version does not update any tires associated with the vehicle.
- Parameters
-
[in] time [in] current time [in] driver_inputs [in] current driver inputs
Reimplemented from chrono::vehicle::ChVehicle.
◆ Synchronize() [2/2]
|
overridevirtual |
Update the state of this vehicle at the current time.
The vehicle system is provided the current driver inputs (throttle between 0 and 1, steering between -1 and +1, braking between 0 and 1), and a reference to the terrain system. If tires are associated with the vehicle wheels, their Synchronize method is invoked.
- Parameters
-
[in] time [in] current time [in] driver_inputs [in] current driver inputs [in] terrain [in] reference to the terrain system
Reimplemented from chrono::vehicle::ChVehicle.
◆ UpdateInertiaProperties()
|
finaloverrideprotectedvirtual |
Calculate current vehicle inertia properties.
This function is called at the end of each vehicle state advance.
Implements chrono::vehicle::ChVehicle.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/ChWheeledVehicle.h
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/ChWheeledVehicle.cpp
