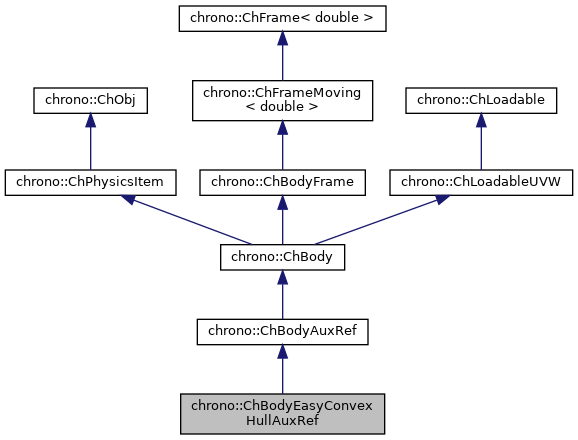
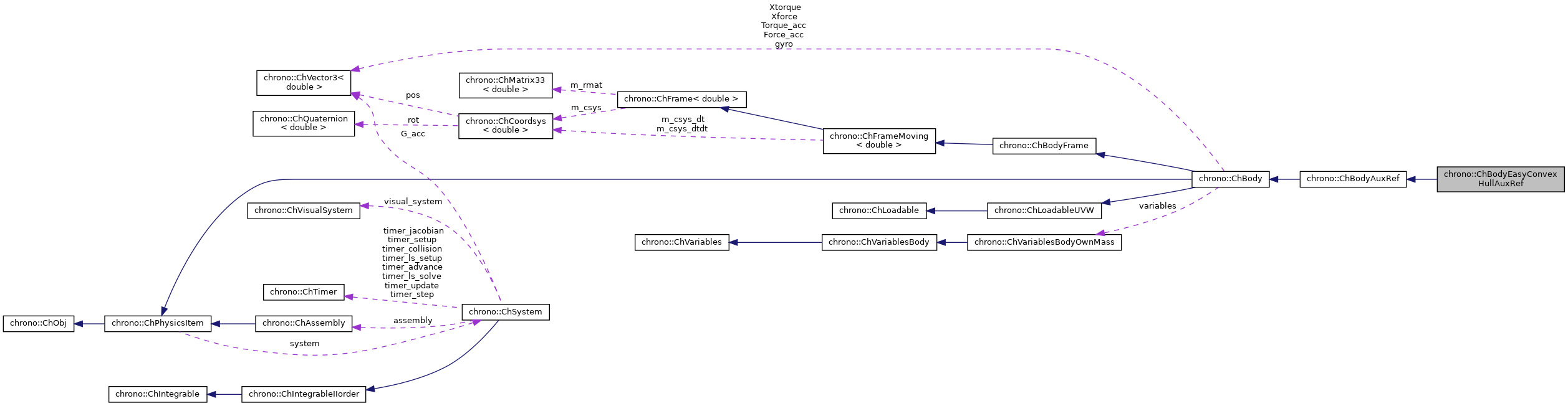
Description
Create rigid body with a convex hull shape, with a reference frame distinct from the centroidal frame.
Optionally sets the visualization and/or collision geometry and automatically calculates intertia properties based on the geometry.
#include <ChBodyEasy.h>
Public Member Functions | |
| ChBodyEasyConvexHullAuxRef (std::vector< ChVector3d > &points, double density, bool visualize=true, bool collide=false, std::shared_ptr< ChContactMaterial > material=nullptr) | |
| Create a ChBodyAuxRef with optional convex hull visualization and/or collision shape. More... | |
| ChBodyEasyConvexHullAuxRef (std::vector< ChVector3d > &points, double density, std::shared_ptr< ChContactMaterial > material) | |
| Create a ChBodyAuxRef with a convex hull visualization and collision shape. More... | |
| std::shared_ptr< ChTriangleMeshConnected > | GetMesh () const |
| virtual void | ArchiveOutConstructor (ChArchiveOut &archive_out) |
| Deserialization for non-default constructor classes. | |
 Public Member Functions inherited from chrono::ChBodyAuxRef Public Member Functions inherited from chrono::ChBodyAuxRef | |
| ChBodyAuxRef (const ChBodyAuxRef &other) | |
| virtual ChBodyAuxRef * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| void | SetFrameRefToAbs (const ChFrame<> &frame) |
| Set the auxiliary reference frame with respect to the absolute frame. More... | |
| virtual const ChFrameMoving & | GetFrameRefToAbs () const override |
| Get the auxiliary reference frame with respect to the absolute frame. More... | |
| void | SetFrameCOMToRef (const ChFrame<> &frame) |
| Set the COG frame with respect to the auxiliary reference frame. More... | |
| ChFrame | GetFrameCOMToRef () const |
| Get the COG frame with respect to the auxiliary reference frame. | |
| void | SetFrameRefToCOM (const ChFrame<> &frame) |
| Set the auxiliary reference frame with respect to the COG frame. More... | |
| const ChFrame & | GetFrameRefToCOM () const |
| Get the auxiliary reference frame with respect to the COG frame. | |
| virtual void | Update (bool update_assets=true) override |
| Update all auxiliary data of the rigid body and of its children (markers, forces..) | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. More... | |
| Public Member Functions inherited from chrono::ChBody | |
| ChBody (const ChBody &other) | |
| void | SetFixed (bool state) |
| Sets the 'fixed' state of the body. More... | |
| bool | IsFixed () const |
| Return true if this body is fixed to ground. | |
| void | EnableCollision (bool state) |
| Enable/disable the collision for this rigid body. | |
| virtual bool | IsCollisionEnabled () const override |
| Return true if collision is enabled for this body. | |
| void | SetLimitSpeed (bool state) |
| Enable the maximum linear speed limit (default: false). | |
| void | SetUseGyroTorque (bool state) |
| Enable/disable the gyroscopic torque (quadratic term). More... | |
| bool | IsUsingGyroTorque () const |
| Return true if gyroscopic torque is used (default=true). | |
| void | SetSleepingAllowed (bool state) |
| Enable/disable option for setting bodies to 'sleep'. More... | |
| bool | IsSleepingAllowed () const |
| Return true if 'sleep' mode is allowed for this specific body. | |
| void | SetSleeping (bool state) |
| Force the body in sleeping mode or not. More... | |
| bool | IsSleeping () const |
| Return true if this body is currently in 'sleep' mode. | |
| bool | TrySleeping () |
| Test if a body could go in sleeping state if requirements are satisfied. More... | |
| virtual bool | IsActive () const override |
| Return true if the body is currently active and therefore included into the system solver. More... | |
| unsigned int | GetIndex () |
| Get the unique sequential body index (internal use only). | |
| virtual unsigned int | GetNumCoordsPosLevel () override |
| Number of coordinates of body: 7 because uses quaternions for rotation. | |
| virtual unsigned int | GetNumCoordsVelLevel () override |
| Number of coordinates of body: 6 because derivatives use angular velocity. | |
| virtual ChVariables & | Variables () override |
| Return a reference to the encapsulated ChVariablesBody, representing states (pos, speed, or accel.) and forces. More... | |
| void | ForceToRest () override |
| Set no speed and no accelerations (but does not change the position). | |
| virtual void | AddCollisionModelsToSystem (ChCollisionSystem *coll_sys) const override |
| Add the body collision model (if any) to the provided collision system. | |
| virtual void | RemoveCollisionModelsFromSystem (ChCollisionSystem *coll_sys) const override |
| Remove the body collision model (if any) from the provided collision system. | |
| virtual void | SyncCollisionModels () override |
| Synchronize the position and bounding box of the body collision model (if any). | |
| virtual const ChFrameMoving & | GetFrameCOMToAbs () const |
| Get the rigid body coordinate system that represents the GOG (Center of Gravity). More... | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const override |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| virtual ChAABB | GetTotalAABB () override |
| Get the axis-aligned bounding (AABB) box of the object. More... | |
| void | AddMarker (std::shared_ptr< ChMarker > amarker) |
| Attach a marker to this body. | |
| void | AddForce (std::shared_ptr< ChForce > aforce) |
| Attach a force to this body. | |
| void | RemoveMarker (std::shared_ptr< ChMarker > amarker) |
| Remove a specific marker from this body. More... | |
| void | RemoveForce (std::shared_ptr< ChForce > aforce) |
| Remove a specific force from this body. More... | |
| void | RemoveAllForces () |
| Remove all markers at once. More... | |
| void | RemoveAllMarkers () |
| Remove all markers at once. More... | |
| std::shared_ptr< ChMarker > | SearchMarker (const std::string &name) const |
| Find a marker by its name. | |
| std::shared_ptr< ChMarker > | SearchMarker (int id) const |
| Find a marker by its identifier. | |
| std::shared_ptr< ChForce > | SearchForce (const std::string &name) const |
| Find a force by its name. | |
| const std::vector< std::shared_ptr< ChMarker > > & | GetMarkers () const |
| Gets the list of children markers. More... | |
| const std::vector< std::shared_ptr< ChForce > > & | GetForces () const |
| Gets the list of children forces. More... | |
| void | SetMass (double newmass) |
| Set the body mass. More... | |
| double | GetMass () |
| Get the body mass. | |
| void | SetInertia (const ChMatrix33<> &newXInertia) |
| Set the inertia tensor of the body. More... | |
| const ChMatrix33 & | GetInertia () const |
| Get the inertia tensor, expressed in the local coordinate system. More... | |
| const ChMatrix33 & | GetInvInertia () const |
| Get the inverse of the inertia matrix. | |
| void | SetInertiaXX (const ChVector3d &iner) |
| Set the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| ChVector3d | GetInertiaXX () const |
| Get the diagonal part of the inertia tensor (Ixx, Iyy, Izz values). More... | |
| void | SetInertiaXY (const ChVector3d &iner) |
| Set the off-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values). More... | |
| ChVector3d | GetInertiaXY () const |
| Get the extra-diagonal part of the inertia tensor (Ixy, Ixz, Iyz values). More... | |
| void | SetMaxLinVel (float m_max_speed) |
| Set the maximum linear speed (beyond this limit it will be clamped). More... | |
| float | GetMaxLinVel () const |
| void | SetMaxAngVel (float m_max_wvel) |
| Set the maximum angular speed (beyond this limit it will be clamped). More... | |
| float | GetMaxAngVel () const |
| void | ClampSpeed () |
| Clamp the body speed to the provided limits. More... | |
| void | SetSleepTime (float m_t) |
| Set the amount of time which must pass before going automatically in sleep mode when the body has very small movements. | |
| float | GetSleepTime () const |
| void | SetSleepMinLinVel (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinLinVel () const |
| void | SetSleepMinAngVel (float m_t) |
| Set the max linear speed to be kept for 'sleep_time' before freezing. | |
| float | GetSleepMinAngVel () const |
| void | ComputeQInertia (ChMatrix44<> &mQInertia) |
| Computes the 4x4 inertia tensor in quaternion space, if needed. | |
| void | ComputeGyro () |
| Computes the gyroscopic torque. More... | |
| void | AccumulateForce (const ChVector3d &force, const ChVector3d &appl_point, bool local) |
| Add an applied force to the body's accumulator (as an increment). More... | |
| void | AccumulateTorque (const ChVector3d &torque, bool local) |
| Add an applied torque to the body's accumulator (as an increment). More... | |
| void | EmptyAccumulators () |
| Clear the force and torque accumulators. | |
| const ChVector3d & | GetAccumulatedForce () const |
| Return the current value of the accumulator force. More... | |
| const ChVector3d & | GetAccumulatedTorque () const |
| Return the current value of the accumulator torque. More... | |
| void | UpdateMarkers (double mytime) |
| Update all children markers of the rigid body, at current body state. | |
| void | UpdateForces (double mytime) |
| Update all children forces of the rigid body, at current body state. | |
| void | UpdateTime (double mytime) |
| Update local time of rigid body, and time-dependent data. | |
| virtual void | Update (double mytime, bool update_assets=true) override |
| Update all auxiliary data of the rigid body and of its children (markers, forces..), at given time. | |
| ChVector3d | GetAppliedForce () |
| Return the resultant applied force on the body. More... | |
| ChVector3d | GetAppliedTorque () |
| Return the resultant applied torque on the body. More... | |
| ChVector3d | GetContactForce () |
| Get the resultant contact force acting on this body. | |
| ChVector3d | GetContactTorque () |
| Get the resultant contact torque acting on this body. | |
| virtual ChPhysicsItem * | GetPhysicsItem () override |
| This is only for backward compatibility. | |
| virtual void | LoadableGetVariables (std::vector< ChVariables * > &mvars) override |
| Get the pointers to the contained ChVariables, appending to the mvars vector. | |
| virtual void | LoadableStateIncrement (const unsigned int off_x, ChState &x_new, const ChState &x, const unsigned int off_v, const ChStateDelta &Dv) override |
| Increment all DOFs using a delta. | |
| virtual void | LoadableGetStateBlockPosLevel (int block_offset, ChState &mD) override |
| Gets all the DOFs packed in a single vector (position part) | |
| virtual void | LoadableGetStateBlockVelLevel (int block_offset, ChStateDelta &mD) override |
| Gets all the DOFs packed in a single vector (speed part) | |
| virtual void | ComputeNF (const double U, const double V, const double W, ChVectorDynamic<> &Qi, double &detJ, const ChVectorDynamic<> &F, ChVectorDynamic<> *state_x, ChVectorDynamic<> *state_w) override |
| Evaluate Q=N'*F, for Q generalized lagrangian load, where N is some type of matrix evaluated at point P(U,V,W) assumed in absolute coordinates, and F is a load assumed in absolute coordinates. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem(). | |
| virtual void | SetSystem (ChSystem *m_system) |
| Set the pointer to the parent ChSystem(). More... | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| void | AddVisualShapeFEA (std::shared_ptr< ChVisualShapeFEA > shapeFEA) |
| Add the specified FEA visualization object to the visualization model. More... | |
| std::shared_ptr< ChVisualShapeFEA > | GetVisualShapeFEA (unsigned int i) const |
| Access the specified FEA visualization object in the visualization model (if any). More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this physics item. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a ChCamera to this physical item. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this physics item. | |
| virtual void | GetCenter (ChVector3d &mcenter) |
| Get a symbolic 'center' of the object. More... | |
| virtual void | Setup () |
| This might recompute the number of coordinates, DOFs, constraints, in case this might change (ex in ChAssembly), as well as state offsets of contained items (ex in ChMesh) | |
| virtual unsigned int | GetNumConstraints () |
| Get the number of scalar constraints. | |
| virtual unsigned int | GetNumConstraintsBilateral () |
| Get the number of bilateral scalar constraints. | |
| virtual unsigned int | GetNumConstraintsUnilateral () |
| Get the number of unilateral scalar constraints. | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the lagrangian multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the lagrangian multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | IntStateGatherReactions (const unsigned int off_L, ChVectorDynamic<> &L) |
| From item's reaction forces to global reaction vector. More... | |
| virtual void | IntStateScatterReactions (const unsigned int off_L, const ChVectorDynamic<> &L) |
| From global reaction vector to item's reaction forces. More... | |
| virtual void | IntLoadResidual_CqL (const unsigned int off_L, ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) |
| Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L. More... | |
| virtual void | IntLoadConstraint_C (const unsigned int off, ChVectorDynamic<> &Qc, const double c, bool do_clamp, double recovery_clamp) |
| Takes the term C, scale and adds to Qc at given offset: Qc += c*C. More... | |
| virtual void | IntLoadConstraint_Ct (const unsigned int off, ChVectorDynamic<> &Qc, const double c) |
| Takes the term Ct, scale and adds to Qc at given offset: Qc += c*Ct. More... | |
| virtual void | InjectConstraints (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChConstraint objects associated with this item. | |
| virtual void | LoadConstraintJacobians () |
| Compute and load current Jacobians in encapsulated ChConstraint objects. | |
| virtual void | InjectKRMMatrices (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChKRMBlock objects associated with this item. | |
| virtual void | LoadKRMMatrices (double Kfactor, double Rfactor, double Mfactor) |
| Compute and load current stiffnes (K), damping (R), and mass (M) matrices in encapsulated ChKRMBlock objects. More... | |
| virtual void | ConstraintsBiReset () |
| Sets to zero the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_C (double factor=1, double recovery_clamp=0.1, bool do_clamp=false) |
| Adds the current C (constraint violation) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Ct (double factor=1) |
| Adds the current Ct (partial t-derivative, as in C_dt=0-> [Cq]*q_dt=-Ct) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| virtual void | ConstraintsFetch_react (double factor=1) |
| Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints. More... | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| virtual std::string & | ArchiveContainerName () |
| Public Member Functions inherited from chrono::ChBodyFrame | |
| ChBodyFrame (const ChBodyFrame &other) | |
| ChWrenchd | AppliedForceLocalToWrenchParent (const ChVector3d &force, const ChVector3d &appl_point) |
| Transform a force applied to a point on the body to a force and moment at the frame origin. More... | |
| ChWrenchd | AppliedForceParentToWrenchParent (const ChVector3d &force, const ChVector3d &appl_point) |
| Transform a force applied to a point on the body to a force and moment at the frame origin. More... | |
| Public Member Functions inherited from chrono::ChFrameMoving< double > | |
| ChFrameMoving (const ChVector3< double > &mv=ChVector3< double >(0, 0, 0), const ChQuaternion< double > &mq=ChQuaternion< double >(1, 0, 0, 0)) | |
| Construct from pos and rot (as a quaternion). | |
| ChFrameMoving (const ChVector3< double > &mv, const ChMatrix33< double > &ma) | |
| Construct from pos and rotation (as a 3x3 matrix). | |
| ChFrameMoving (const ChCoordsys< double > &mc) | |
| Construct from a coordsys. | |
| ChFrameMoving (const ChFrame< double > &mc) | |
| Construct from a frame. | |
| ChFrameMoving (const ChFrameMoving< double > &other) | |
| Copy constructor, build from another moving frame. | |
| virtual | ~ChFrameMoving () |
| Destructor. | |
| ChFrameMoving< double > & | operator= (const ChFrameMoving< double > &other) |
| Assignment operator: copy from another moving frame. | |
| ChFrameMoving< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrameMoving< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrameMoving< double > &other) const |
| Returns true for different frames. | |
| ChFrameMoving< double > | operator>> (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > | operator* (const ChFrameMoving< double > &F) const |
| Transform another frame through this frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChFrameMoving< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrameMoving< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrameMoving< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrameMoving< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. | |
| ChFrameMoving< double > & | operator*= (const ChFrameMoving< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsysDt () const |
| Return both rotation and translation velocities as a ChCoordsys object. | |
| const ChCoordsys< double > & | GetCoordsysDt2 () const |
| Return both rotation and translation accelerations as a ChCoordsys object. | |
| const ChVector3< double > & | GetPosDt () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetLinVel () const |
| Return the linear velocity. | |
| const ChVector3< double > & | GetPosDt2 () const |
| Return the linear acceleration. | |
| const ChVector3< double > & | GetLinAcc () const |
| Return the linear acceleration. | |
| const ChQuaternion< double > & | GetRotDt () const |
| Return the rotation velocity as a quaternion. | |
| const ChQuaternion< double > & | GetRotDt2 () const |
| Return the rotation acceleration as a quaternion. | |
| ChVector3< double > | GetAngVelLocal () const |
| Compute the angular velocity (expressed in local coords). | |
| ChVector3< double > | GetAngVelParent () const |
| Compute the actual angular velocity (expressed in parent coords). | |
| ChVector3< double > | GetAngAccLocal () const |
| Compute the actual angular acceleration (expressed in local coords). | |
| ChVector3< double > | GetAngAccParent () const |
| Compute the actual angular acceleration (expressed in parent coords). | |
| virtual void | SetCoordsysDt (const ChCoordsys< double > &csys_dt) |
| Set both linear and rotation velocities as a single ChCoordsys derivative. | |
| virtual void | SetPosDt (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetLinVel (const ChVector3< double > &vel) |
| Set the linear velocity. | |
| virtual void | SetRotDt (const ChQuaternion< double > &q_dt) |
| Set the rotation velocity as a quaternion derivative. More... | |
| virtual void | SetAngVelLocal (const ChVector3< double > &w) |
| Set the rotation velocity from the given angular velocity (expressed in local coordinates). | |
| virtual void | SetAngVelParent (const ChVector3< double > &w) |
| Set the rotation velocity from given angular velocity (expressed in parent coordinates). | |
| virtual void | SetCoordsysDt2 (const ChCoordsys< double > &csys_dtdt) |
| Set the linear and rotation accelerations as a single ChCoordsys derivative. | |
| virtual void | SetPosDt2 (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetLinAcc (const ChVector3< double > &acc) |
| Set the linear acceleration. | |
| virtual void | SetRotDt2 (const ChQuaternion< double > &q_dtdt) |
| Set the rotation acceleration as a quaternion derivative. More... | |
| virtual void | SetAngAccLocal (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in local coordinates). More... | |
| virtual void | SetAngAccParent (const ChVector3< double > &a) |
| Set the rotation acceleration from given angular acceleration (expressed in parent coordinates). | |
| void | ComputeRotMatDt (ChMatrix33< double > &R_dt) const |
| Compute the time derivative of the rotation matrix. | |
| void | ComputeRotMatDt2 (ChMatrix33< double > &R_dtdt) |
| Compute the second time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt () |
| Return the time derivative of the rotation matrix. | |
| ChMatrix33< double > | GetRotMatDt2 () |
| Return the second time derivative of the rotation matrix. | |
| void | ConcatenatePreTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrameMoving< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos) const |
| Return the velocity in the parent frame of a point fixed to this frame and expressed in local coordinates. | |
| ChVector3< double > | PointSpeedLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed) const |
| Return the velocity in the parent frame of a moving point, given the point location and velocity expressed in local coordinates. | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos) const |
| Return the acceleration in the parent frame of a point fixed to this frame and expressed in local coordinates. More... | |
| ChVector3< double > | PointAccelerationLocalToParent (const ChVector3< double > &localpos, const ChVector3< double > &localspeed, const ChVector3< double > &localacc) const |
| Return the acceleration in the parent frame of a moving point, given the point location, velocity, and acceleration expressed in local coordinates. | |
| ChVector3< double > | PointSpeedParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed) const |
| Return the velocity of a point expressed in this frame, given the point location and velocity in the parent frame. | |
| ChVector3< double > | PointAccelerationParentToLocal (const ChVector3< double > &parentpos, const ChVector3< double > &parentspeed, const ChVector3< double > &parentacc) const |
| Return the acceleration of a point expressed in this frame, given the point location, velocity, and acceleration in the parent frame. | |
| ChFrameMoving< double > | TransformLocalToParent (const ChFrameMoving< double > &F) const |
| Transform a moving frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrameMoving< double > | TransformParentToLocal (const ChFrameMoving< double > &F) const |
| Transform a moving frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrameMoving< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrameMoving< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| virtual void | Invert () override |
| Invert in place. More... | |
| ChFrameMoving< double > | GetInverse () const |
| Return the inverse transform. | |
| Public Member Functions inherited from chrono::ChFrame< double > | |
| ChFrame (const ChVector3< double > &v=ChVector3< double >(0, 0, 0), const ChQuaternion< double > &q=ChQuaternion< double >(1, 0, 0, 0)) | |
| Default constructor, or construct from pos and rot (as a quaternion) | |
| ChFrame (const ChVector3< double > &v, const ChMatrix33< double > &R) | |
| Construct from pos and rotation (as a 3x3 matrix) | |
| ChFrame (const ChCoordsys< double > &C) | |
| Construct from a coordsys. | |
| ChFrame (const ChVector3< double > &v, const double angle, const ChVector3< double > &u) | |
| Construct from position mv and rotation of angle alpha around unit vector mu. | |
| ChFrame (const ChFrame< double > &other) | |
| Copy constructor, build from another frame. | |
| ChFrame< double > & | operator= (const ChFrame< double > &other) |
| Assignment operator: copy from another frame. | |
| bool | operator== (const ChFrame< double > &other) const |
| Returns true for identical frames. | |
| bool | operator!= (const ChFrame< double > &other) const |
| Returns true for different frames. | |
| ChFrame< double > | operator* (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator* (const ChVector3< double > &v) const |
| Transform a vector through this frame (express in parent frame). More... | |
| ChFrame< double > | operator>> (const ChFrame< double > &F) const |
| Transform another frame through this frame. More... | |
| ChVector3< double > | operator/ (const ChVector3< double > &v) const |
| Transform a vector through this frame (express from parent frame). More... | |
| ChFrame< double > & | operator>>= (const ChFrame< double > &F) |
| Transform this frame by pre-multiplication with another frame. More... | |
| ChFrame< double > & | operator>>= (const ChVector3< double > &v) |
| Transform this frame by pre-multiplication with a given vector (translate frame). | |
| ChFrame< double > & | operator>>= (const ChQuaternion< double > &q) |
| Transform this frame by pre-multiplication with a given quaternion (rotate frame). | |
| ChFrame< double > & | operator>>= (const ChCoordsys< double > &C) |
| Transform this frame by pre-multiplication with a given coordinate system. | |
| ChFrame< double > & | operator*= (const ChFrame< double > &F) |
| Transform this frame by post-multiplication with another frame. More... | |
| const ChCoordsys< double > & | GetCoordsys () const |
| Return both current rotation and translation as a ChCoordsys object. | |
| const ChVector3< double > & | GetPos () const |
| Return the current translation vector. | |
| const ChQuaternion< double > & | GetRot () const |
| Return the current rotation quaternion. | |
| const ChMatrix33< double > & | GetRotMat () const |
| Return the current 3x3 rotation matrix. | |
| ChVector3< double > | GetRotAxis () const |
| Get axis of finite rotation, in parent space. | |
| double | GetRotAngle () const |
| Get angle of rotation about axis of finite rotation. | |
| void | SetCoordsys (const ChCoordsys< double > &C) |
| Impose both translation and rotation as a single ChCoordsys. More... | |
| void | SetCoordsys (const ChVector3< double > &v, const ChQuaternion< double > &q) |
| Impose both translation and rotation. More... | |
| void | SetRot (const ChQuaternion< double > &q) |
| Impose the rotation as a quaternion. More... | |
| void | SetRot (const ChMatrix33< double > &R) |
| Impose the rotation as a 3x3 matrix. More... | |
| void | SetPos (const ChVector3< double > &pos) |
| Impose the translation vector. | |
| void | ConcatenatePreTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame. More... | |
| void | ConcatenatePostTransformation (const ChFrame< double > &F) |
| Apply a transformation (rotation and translation) represented by another frame F in local coordinate. More... | |
| void | Move (const ChVector3< double > &v) |
| An easy way to move the frame by the amount specified by vector v, (assuming v expressed in parent coordinates) | |
| void | Move (const ChCoordsys< double > &C) |
| Apply both translation and rotation, assuming both expressed in parent coordinates, as a vector for translation and quaternion for rotation,. | |
| ChVector3< double > | TransformPointLocalToParent (const ChVector3< double > &v) const |
| Transform a point from the local frame coordinate system to the parent coordinate system. | |
| ChVector3< double > | TransformPointParentToLocal (const ChVector3< double > &v) const |
| Transforms a point from the parent coordinate system to local frame coordinate system. | |
| ChVector3< double > | TransformDirectionLocalToParent (const ChVector3< double > &d) const |
| Transform a direction from the parent frame coordinate system to 'this' local coordinate system. | |
| ChVector3< double > | TransformDirectionParentToLocal (const ChVector3< double > &d) const |
| Transforms a direction from 'this' local coordinate system to parent frame coordinate system. | |
| ChWrench< double > | TransformWrenchLocalToParent (const ChWrench< double > &w) const |
| Transform a wrench from the local coordinate system to the parent coordinate system. | |
| ChWrench< double > | TransformWrenchParentToLocal (const ChWrench< double > &w) const |
| Transform a wrench from the parent coordinate system to the local coordinate system. | |
| ChFrame< double > | TransformLocalToParent (const ChFrame< double > &F) const |
| Transform a frame from 'this' local coordinate system to parent frame coordinate system. | |
| ChFrame< double > | TransformParentToLocal (const ChFrame< double > &F) const |
| Transform a frame from the parent coordinate system to 'this' local frame coordinate system. | |
| bool | Equals (const ChFrame< double > &other) const |
| Returns true if this transform is identical to the other transform. | |
| bool | Equals (const ChFrame< double > &other, double tol) const |
| Returns true if this transform is equal to the other transform, within a tolerance 'tol'. | |
| void | Normalize () |
| Normalize the rotation, so that quaternion has unit length. | |
| virtual void | SetIdentity () |
| Sets to no translation and no rotation. | |
| ChFrame< double > | GetInverse () const |
| Return the inverse transform. | |
| Public Member Functions inherited from chrono::ChLoadableUVW | |
| virtual bool | IsTetrahedronIntegrationNeeded () |
| If true, use quadrature over u,v,w in [0..1] range as tetrahedron volumetric coords (with z=1-u-v-w) otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
| virtual bool | IsTrianglePrismIntegrationNeeded () |
| If true, use quadrature over u,v in [0..1] range as triangle natural coords (with z=1-u-v), and use linear quadrature over w in [-1..+1], otherwise use default quadrature over u,v,w in [-1..+1] as box isoparametric coords. | |
Static Public Member Functions | |
| static void * | ArchiveInConstructor (ChArchiveIn &archive_in) |
| Serialization for non-default constructor classes. | |
Additional Inherited Members | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChBody | |
| std::vector< std::shared_ptr< ChMarker > > | marklist |
| list of markers | |
| std::vector< std::shared_ptr< ChForce > > | forcelist |
| list of forces | |
| ChVector3d | gyro |
| gyroscopic torque, i.e. Qm = Wvel x (XInertia*Wvel) | |
| ChVector3d | Xforce |
| force acting on body, applied to COM (in absolute coords) | |
| ChVector3d | Xtorque |
| torque acting on body (in body local coords) | |
| ChVector3d | Force_acc |
| force accumulator, applied to COM (in absolute coords) | |
| ChVector3d | Torque_acc |
| torque accumulator (in body local coords) | |
| ChVariablesBodyOwnMass | variables |
| interface to solver (store inertia and coordinates) | |
| float | max_speed |
| limit on linear speed | |
| float | max_wvel |
| limit on angular velocity | |
| float | sleep_time |
| float | sleep_minspeed |
| float | sleep_minwvel |
| float | sleep_starttime |
| unsigned int | index |
| unique sequential body identifier, used for indexing (internal use only) | |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
| ChSystem * | system |
| parent system | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of lagrangian multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
| Protected Attributes inherited from chrono::ChFrameMoving< double > | |
| ChCoordsys< double > | m_csys_dt |
| rotation and position velocity, as vector + quaternion | |
| ChCoordsys< double > | m_csys_dtdt |
| rotation and position acceleration, as vector + quaternion | |
| Protected Attributes inherited from chrono::ChFrame< double > | |
| ChCoordsys< double > | m_csys |
| position and rotation, as vector + quaternion | |
| ChMatrix33< double > | m_rmat |
| 3x3 orthogonal rotation matrix | |
Constructor & Destructor Documentation
◆ ChBodyEasyConvexHullAuxRef() [1/2]
| chrono::ChBodyEasyConvexHullAuxRef::ChBodyEasyConvexHullAuxRef | ( | std::vector< ChVector3d > & | points, |
| double | density, | ||
| bool | visualize = true, |
||
| bool | collide = false, |
||
| std::shared_ptr< ChContactMaterial > | material = nullptr |
||
| ) |
Create a ChBodyAuxRef with optional convex hull visualization and/or collision shape.
The convex hull is defined with a set of points, expressed in a local frame. Mass and inertia are set automatically depending on density. The center of mass is set at the barycenter.
- Parameters
-
points convex hull points density density of the body visualize create visualization asset collide enable collision material surface contact material
◆ ChBodyEasyConvexHullAuxRef() [2/2]
| chrono::ChBodyEasyConvexHullAuxRef::ChBodyEasyConvexHullAuxRef | ( | std::vector< ChVector3d > & | points, |
| double | density, | ||
| std::shared_ptr< ChContactMaterial > | material | ||
| ) |
Create a ChBodyAuxRef with a convex hull visualization and collision shape.
The convex hull is defined with a set of points, expressed in a local frame. Mass and inertia are set automatically depending on density. The center of mass is set at the barycenter.
- Parameters
-
points convex hull points density density of the body material surface contact material
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyEasy.h
- /builds/uwsbel/chrono/src/chrono/physics/ChBodyEasy.cpp
