Public Member Functions |
Protected Member Functions |
Protected Attributes |
Friends |
List of all members
chrono::vehicle::ChVehicleIrrApp Class Reference
Description
custom event receiver for chase-cam control
Customized Chrono Irrlicht application for vehicle visualization. This class implements an Irrlicht-based visualization wrapper for vehicles. This class is a wrapper around a ChIrrApp object and provides the following functionality:
- rendering of the entire Irrlicht scene
- implements a custom chase-camera (which can be controlled with keyboard)
- optional rendering of links, springs, stats, etc.
#include <ChVehicleIrrApp.h>
Inheritance diagram for chrono::vehicle::ChVehicleIrrApp:
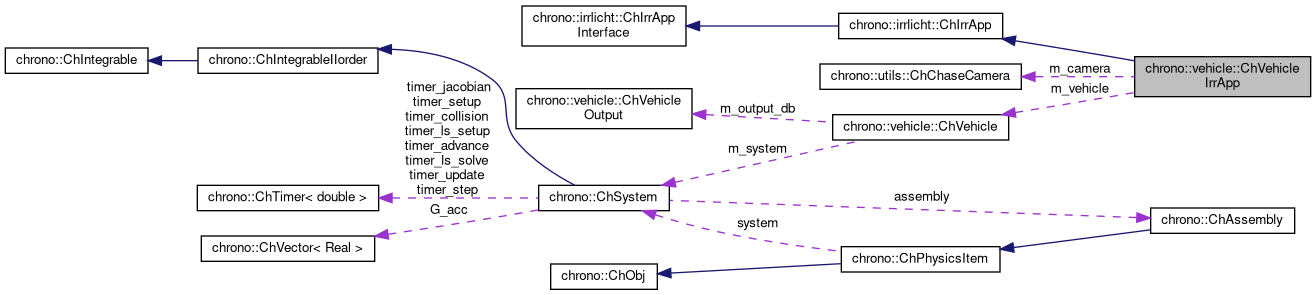
Collaboration diagram for chrono::vehicle::ChVehicleIrrApp:
Public Member Functions | |
| ChVehicleIrrApp (ChVehicle *vehicle, const std::wstring &title=L"Chrono::Vehicle", const irr::core::dimension2d< irr::u32 > &dims=irr::core::dimension2d< irr::u32 >(1000, 800), irr::ELOG_LEVEL log_level=irr::ELL_INFORMATION) | |
| Construct a vehicle Irrlicht application. More... | |
| void | SetSkyBox () |
| Create a skybox that has Z pointing up. More... | |
| void | SetChaseCamera (const ChVector<> &ptOnChassis, double chaseDist, double chaseHeight) |
| Set parameters for the underlying chase camera. More... | |
| void | SetStepsize (double val) |
| Set the step size for integration of the chase-cam dynamics. | |
| void | SetChaseCameraState (utils::ChChaseCamera::State state) |
| Set camera state (mode). | |
| void | SetChaseCameraPosition (const ChVector<> &pos) |
| Set camera position. More... | |
| void | SetChaseCameraAngle (double angle) |
| Set camera angle. | |
| void | SetChaseCameraMultipliers (double minMult, double maxMult) |
| Set camera zoom multipliers. | |
| void | SetHUDLocation (int HUD_x, int HUD_y) |
| Set the upper-left point of HUD elements. | |
| void | EnableStats (bool val) |
| Turn on/off rendering of stats (HUD). | |
| void | EnableSound (bool sound) |
| Turn on/off Irrklang sound generation. More... | |
| virtual void | DrawAll () override |
| Render the Irrlicht scene and additional visual elements. | |
| void | RenderGrid (const ChVector<> &loc, int num_divs, double delta) |
| Render a horizontal grid at the specified location. | |
| void | RenderFrame (const ChFrame<> &frame, double axis_length=1) |
| Render the specified reference frame. | |
| void | Synchronize (const std::string &msg, const ChDriver::Inputs &driver_inputs) |
| Update information related to driver inputs. | |
| void | Advance (double step) |
| Advance the dynamics of the chase camera. More... | |
| void | WriteImageToFile (const std::string &filename) |
| Save a snapshot of the last rendered frame to file. More... | |
 Public Member Functions inherited from chrono::irrlicht::ChIrrApp Public Member Functions inherited from chrono::irrlicht::ChIrrApp | |
| ChIrrApp (ChSystem *psystem, const std::wstring &title=L"Chrono", const irr::core::dimension2d< irr::u32 > &dimens=irr::core::dimension2d< irr::u32 >(640, 480), VerticalDir vert=VerticalDir::Y, bool do_fullscreen=false, bool do_shadows=false, bool do_antialias=true, irr::video::E_DRIVER_TYPE mydriver=irr::video::EDT_DIRECT3D9, irr::ELOG_LEVEL log_level=irr::ELL_INFORMATION) | |
| Create the application with Irrlicht context (3D view, device, etc.). | |
| virtual | ~ChIrrApp () |
| Safely delete every Irrlicht item (including the Irrlicht scene nodes). | |
| ChIrrAssetConverter * | GetAssetConverter () |
| Gets the asset converter. | |
| void | AssetBind (std::shared_ptr< ChPhysicsItem > mitem) |
| Shortcut to add and bind a ChIrrNodeAsset to an item, if it has not been added previously. | |
| void | AssetBindAll () |
| Shortcut to add and bind a ChIrrNodeAsset to all items in a ChSystem. More... | |
| void | AssetUpdate (std::shared_ptr< ChPhysicsItem > mitem) |
| This function sets up the Irrlicht nodes corresponding to the geometric assets that are found in the ChPhysicsItem 'mitem'. More... | |
| void | AssetUpdateAll () |
| For all items in a ChSystem, this function sets up the Irrlicht nodes corresponding to the geometric assets that have been added to the items. More... | |
| void | AddShadow (std::shared_ptr< ChPhysicsItem > mitem) |
| Shortcut to enable shadow maps for an item. More... | |
| void | AddShadowAll () |
| Shortcut to enable shadow maps for all items in scene. More... | |
| Public Member Functions inherited from chrono::irrlicht::ChIrrAppInterface | |
| ChIrrAppInterface (ChSystem *psystem, const std::wstring &title=L"Chrono", const irr::core::dimension2d< irr::u32 > &dimens=irr::core::dimension2d< irr::u32 >(640, 480), VerticalDir vert=VerticalDir::Y, bool do_fullscreen=false, bool do_shadows=false, bool do_antialias=true, irr::video::E_DRIVER_TYPE mydriver=irr::video::EDT_DIRECT3D9, irr::ELOG_LEVEL log_level=irr::ELL_INFORMATION) | |
| Create the IRRLICHT context (device, etc.) | |
| virtual | ~ChIrrAppInterface () |
| Safely delete all Irrlicht items (including the Irrlicht scene nodes) | |
| irr::IrrlichtDevice * | GetDevice () |
| irr::video::IVideoDriver * | GetVideoDriver () |
| irr::scene::ISceneManager * | GetSceneManager () |
| irr::scene::ICameraSceneNode * | GetActiveCamera () |
| irr::gui::IGUIEnvironment * | GetIGUIEnvironment () |
| EffectHandler * | GetEffects () |
| irr::scene::ISceneNode * | GetContainer () |
| ChSystem * | GetSystem () |
| void | SetShowInfos (bool val) |
| Show the info panel in the 3D view. | |
| bool | GetShowInfos () |
| void | SetShowProfiler (bool val) |
| Show the realtime profiler in the 3D view. | |
| bool | GetShowProfiler () |
| void | SetShowExplorer (bool val) |
| Show the object explorer. | |
| bool | GetShowExplorer () |
| void | SetTimestep (double val) |
| Set/Get the time step for time integration. More... | |
| double | GetTimestep () |
| void | SetStepManage (bool val) |
| If set to true, you can use DoStep() in the simulation loop to advance the simulation by one timestep. More... | |
| void | SetTryRealtime (bool val) |
| If enabled, the function DoStep() will enforce soft real-time, by spinning in place until simulation time catches up with real time. | |
| void | SetPaused (bool val) |
| Set/Get the simulation state (running or paused) | |
| bool | GetPaused () |
| void | SetVideoframeSave (bool val) |
| If set to true, each frame of the animation will be saved on the disk as snapshot0001.bmp, snapshot0002.bmp, etc. | |
| bool | GetVideoframeSave () |
| void | SetVideoframeSaveInterval (int val) |
| Set to 1 if you need to save on disk all simulation steps, set to 2 for saving each 2 steps, etc. | |
| int | GetVideoframeSaveInterval () |
| void | SetContactsLabelMode (IrrContactsLabelMode mm) |
| Set the label mode for contacts. | |
| void | SetContactsDrawMode (IrrContactsDrawMode mm) |
| Set the draw mode for contacts. | |
| void | SetLinksLabelMode (IrrLinkLabelMode mm) |
| Set the label mode for links. | |
| void | SetLinksDrawMode (IrrLinkDrawMode mm) |
| Set the draw mode for links. | |
| void | SetPlotAABB (bool val) |
| Set if the AABB collision shapes will be plotted. | |
| void | SetPlotCOGFrames (bool val) |
| Set if the COG frames will be plotted. | |
| void | SetPlotCollisionShapes (bool val) |
| Set if the Bullet collision shapes will be plotted. | |
| void | SetPlotLinkFrames (bool val) |
| Set if the link frames will be plotted. | |
| void | SetPlotConvergence (bool val) |
| Set if the COG frames will be plotted. | |
| void | SetSymbolscale (double val) |
| Set the scale for symbol drawing (link frames, COGs, etc.) More... | |
| double | GetSymbolscale () |
| void | SetUserEventReceiver (irr::IEventReceiver *mreceiver) |
| Use this function to hook a custom event receiver to the application. | |
| void | SetFonts (const std::string &mfontdir=GetChronoDataFile("fonts/arial8.xml")) |
| Set the fonts to be used from now on. More... | |
| virtual void | BeginScene (bool backBuffer=true, bool zBuffer=true, irr::video::SColor color=irr::video::SColor(255, 0, 0, 0)) |
| Call this to clean the canvas at the beginning of each animation frame. | |
| virtual void | DoStep () |
| Call this function inside a loop such as. More... | |
| virtual void | EndScene () |
| Call this to end the scene draw at the end of each animation frame. | |
| void | DumpSystemMatrices () |
| Dump the last used system matrices and vectors in the current directory, as 'dump_xxxx.dat' files that can be loaded with Matlab for debugging, benchmarking etc. More... | |
| void | AddTypicalLogo (const std::string &mlogofilename=GetChronoDataFile("logo_chronoengine_alpha.png")) |
| void | AddTypicalCamera (irr::core::vector3df pos=irr::core::vector3df(0, 0, -8), irr::core::vector3df targ=irr::core::vector3df(0, 0, 0)) |
| void | AddTypicalLights (irr::core::vector3df pos1=irr::core::vector3df(30.f, 100.f, 30.f), irr::core::vector3df pos2=irr::core::vector3df(30.f, 80.f, -30.f), double rad1=290, double rad2=190, irr::video::SColorf col1=irr::video::SColorf(0.7f, 0.7f, 0.7f, 1.0f), irr::video::SColorf col2=irr::video::SColorf(0.7f, 0.8f, 0.8f, 1.0f)) |
| void | AddTypicalSky (const std::string &mtexturedir=GetChronoDataFile("skybox/")) |
| irr::scene::ILightSceneNode * | AddLight (irr::core::vector3df pos, double radius, irr::video::SColorf color=irr::video::SColorf(0.7f, 0.7f, 0.7f, 1.0f)) |
| Add a point light to the scene. | |
| irr::scene::ILightSceneNode * | AddLightWithShadow (irr::core::vector3df pos, irr::core::vector3df aim, double radius, double mnear, double mfar, double angle, irr::u32 resolution=512, irr::video::SColorf color=irr::video::SColorf(1.f, 1.f, 1.f, 1.f), bool directional=false, bool clipborder=true) |
| Add a point light that cast shadow (using soft shadows/shadow maps) Note that the quality of the shadow strictly depends on how you set 'mnear' and 'mfar' parameters as close as possible to the bounding box of the scene. More... | |
Protected Member Functions | |
| virtual void | renderOtherGraphics () |
| Render additional graphics. | |
| virtual void | renderOtherStats (int left, int top) |
| Render additional vehicle information. | |
| void | renderLinGauge (const std::string &msg, double factor, bool sym, int xpos, int ypos, int length=120, int height=15) |
| void | renderTextBox (const std::string &msg, int xpos, int ypos, int length=120, int height=15, irr::video::SColor color=irr::video::SColor(255, 20, 20, 20)) |
| void | renderStats () |
Protected Attributes | |
| ChVehicle * | m_vehicle |
| pointer to the associated vehicle system | |
| utils::ChChaseCamera | m_camera |
| chase camera | |
| ChCameraEventReceiver * | m_camera_control |
| event receiver for chase-cam control | |
| double | m_stepsize |
| integration step size for chase-cam dynamics | |
| bool | m_renderStats |
| turn on/off rendering of stats | |
| int | m_HUD_x |
| x-coordinate of upper-left corner of HUD elements | |
| int | m_HUD_y |
| y-coordinate of upper-left corner of HUD elements | |
| std::string | m_driver_msg |
| HUD message from driver system. | |
| double | m_steering |
| driver steering input | |
| double | m_throttle |
| driver throttle input | |
| double | m_braking |
| driver braking input | |
Friends | |
| class | ChCameraEventReceiver |
| class | ChIrrGuiDriver |
| class | ChIrrGuiDriverSTR |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/utils/ChVehicleIrrApp.h
- /builds/uwsbel/chrono/src/chrono_vehicle/utils/ChVehicleIrrApp.cpp
