Description
Base class for a wheeled vehicle driveline subsystem.
#include <ChDrivelineWV.h>
Public Member Functions | |
| ChDrivelineWV (const std::string &name) | |
| virtual int | GetNumDrivenAxles () const =0 |
| Return the number of driven axles. | |
| virtual void | Initialize (std::shared_ptr< ChChassis > chassis, const ChAxleList &axles, const std::vector< int > &driven_axles)=0 |
| Initialize the driveline subsystem. More... | |
| virtual void | Synchronize (double torque) |
| Update the driveline subsystem. More... | |
| virtual void | LockAxleDifferential (int axle, bool lock) |
| Lock/unlock the differential on the specified axle. More... | |
| virtual void | LockCentralDifferential (int which, bool lock) |
| Lock/unlock the specified central differential. More... | |
| const std::vector< int > & | GetDrivenAxleIndexes () const |
| Get the indexes of the vehicle's axles driven by this driveline subsystem. | |
| virtual double | GetSpindleTorque (int axle, VehicleSide side) const =0 |
| Get the motor torque to be applied to the specified spindle. | |
| virtual void | Disconnect ()=0 |
| Disconnect driveline from driven wheels. | |
 Public Member Functions inherited from chrono::vehicle::ChDriveline Public Member Functions inherited from chrono::vehicle::ChDriveline | |
| ChDriveline (const std::string &name) | |
| std::shared_ptr< ChShaft > | GetDriveshaft () const |
| Get a handle to the driveshaft. More... | |
| double | GetDriveshaftSpeed () const |
| Get the angular speed of the driveshaft. More... | |
| Public Member Functions inherited from chrono::vehicle::ChPart | |
| ChPart (const std::string &name) | |
| Construct a vehicle subsystem with the specified name. More... | |
| const std::string & | GetName () const |
| Get the name identifier for this subsystem. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this subsystem. | |
| virtual std::string | GetTemplateName () const =0 |
| Get the name of the vehicle subsystem template. | |
| void | SetVisualizationType (VisualizationType vis) |
| Set the visualization mode for this subsystem. | |
| virtual void | AddVisualizationAssets (VisualizationType vis) |
| Add visualization assets to this subsystem, for the specified visualization mode. | |
| virtual void | RemoveVisualizationAssets () |
| Remove all visualization assets from this subsystem. | |
| virtual void | SetOutput (bool state) |
| Enable/disable output for this subsystem. | |
| bool | OutputEnabled () const |
| Return the output state for this subsystem. | |
| virtual void | ExportComponentList (rapidjson::Document &jsonDocument) const |
| Export this subsystem's component list to the specified JSON object. More... | |
| virtual void | Output (ChVehicleOutput &database) const |
| Output data for this subsystem's component list to the specified database. | |
Protected Attributes | |
| std::vector< int > | m_driven_axles |
| indexes of the driven vehicle axles | |
| Protected Attributes inherited from chrono::vehicle::ChDriveline | |
| std::shared_ptr< ChShaft > | m_driveshaft |
| shaft connection to the powertrain | |
| Protected Attributes inherited from chrono::vehicle::ChPart | |
| std::string | m_name |
| subsystem name | |
| bool | m_output |
| specifies whether or not output is generated for this subsystem | |
Additional Inherited Members | |
| Static Public Member Functions inherited from chrono::vehicle::ChPart | |
| static ChMatrix33 | TransformInertiaMatrix (const ChVector<> &moments, const ChVector<> &products, const ChMatrix33<> &vehicle_rot, const ChMatrix33<> &body_rot) |
| Utility function for transforming inertia tensors between centroidal frames. More... | |
| Protected Member Functions inherited from chrono::vehicle::ChPart | |
| virtual void | Create (const rapidjson::Document &d) |
| Create a vehicle subsystem from JSON data. More... | |
| Static Protected Member Functions inherited from chrono::vehicle::ChPart | |
| static void | ExportBodyList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChBody >> bodies) |
| Export the list of bodies to the specified JSON document. | |
| static void | ExportShaftList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaft >> shafts) |
| Export the list of shafts to the specified JSON document. | |
| static void | ExportJointList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLink >> joints) |
| Export the list of joints to the specified JSON document. | |
| static void | ExportCouplesList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftsCouple >> couples) |
| Export the list of shaft couples to the specified JSON document. | |
| static void | ExportMarkerList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChMarker >> markers) |
| Export the list of markers to the specified JSON document. | |
| static void | ExportLinSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkTSDA >> springs) |
| Export the list of translational springs to the specified JSON document. | |
| static void | ExportRotSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkRotSpringCB >> springs) |
| Export the list of rotational springs to the specified JSON document. | |
| static void | ExportBodyLoadList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLoadBodyBody >> loads) |
| Export the list of body-body loads to the specified JSON document. | |
Member Function Documentation
◆ Initialize()
|
pure virtual |
Initialize the driveline subsystem.
This function connects this driveline subsystem to the specified axle subsystems.
- Parameters
-
chassis associated chassis subsystem axles list of all vehicle axle subsystems driven_axles indexes of the driven vehicle axles
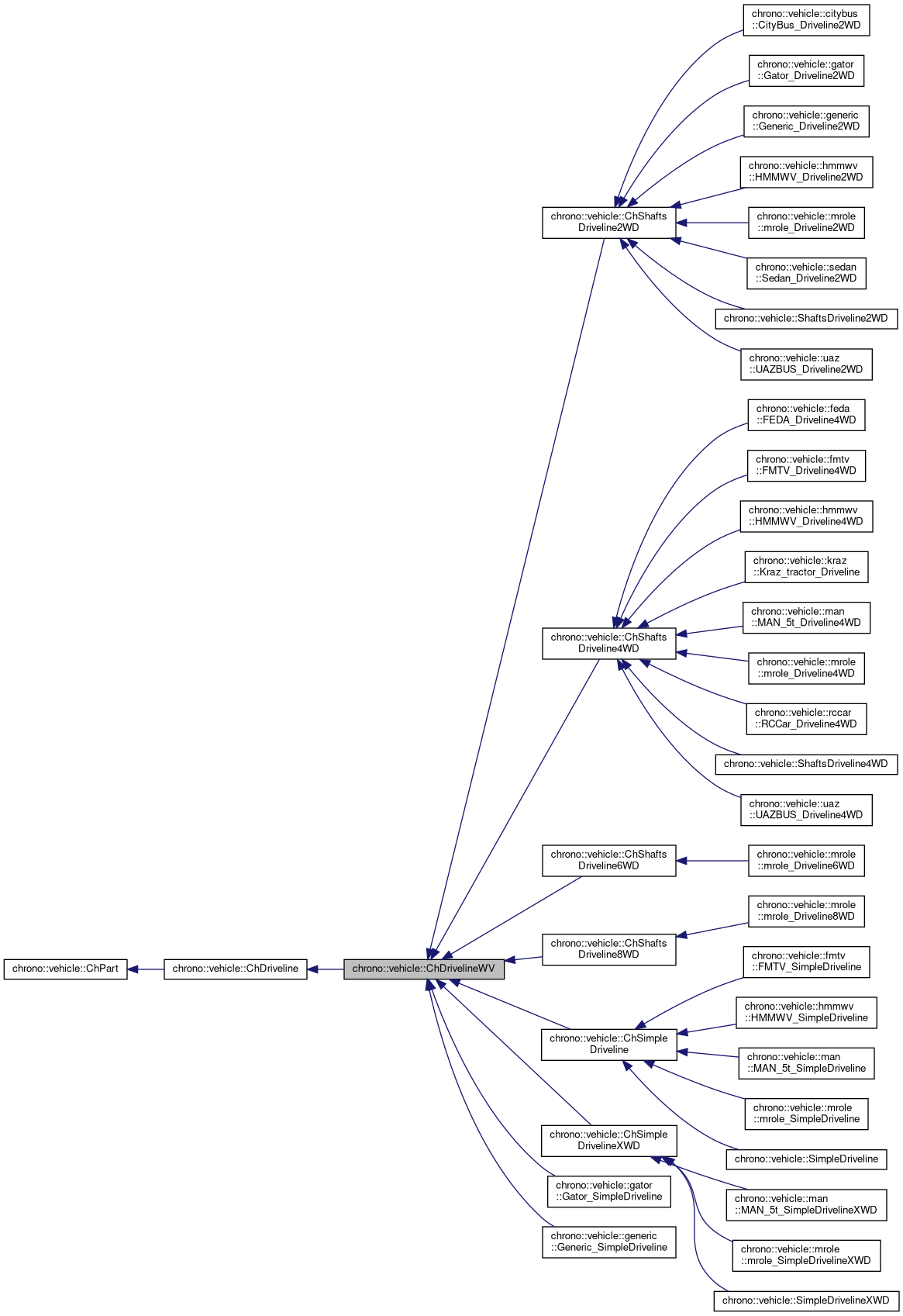
Implemented in chrono::vehicle::ChShaftsDriveline8WD, chrono::vehicle::ChShaftsDriveline6WD, chrono::vehicle::ChShaftsDriveline4WD, chrono::vehicle::ChShaftsDriveline2WD, chrono::vehicle::ChSimpleDrivelineXWD, chrono::vehicle::ChSimpleDriveline, chrono::vehicle::gator::Gator_SimpleDriveline, and chrono::vehicle::generic::Generic_SimpleDriveline.
◆ LockAxleDifferential()
|
virtual |
Lock/unlock the differential on the specified axle.
By convention, axles are counted front to back, starting with index 0 for the front-most axle.
Reimplemented in chrono::vehicle::ChShaftsDriveline8WD, chrono::vehicle::ChShaftsDriveline6WD, chrono::vehicle::ChShaftsDriveline2WD, and chrono::vehicle::ChShaftsDriveline4WD.
◆ LockCentralDifferential()
|
virtual |
Lock/unlock the specified central differential.
By convention, central differentials are counted from front to back, starting with index 0.
Reimplemented in chrono::vehicle::ChShaftsDriveline8WD, chrono::vehicle::ChShaftsDriveline6WD, chrono::vehicle::ChShaftsDriveline4WD, and chrono::vehicle::ChShaftsDriveline2WD.
◆ Synchronize()
|
virtual |
Update the driveline subsystem.
The motor torque represents the input to the driveline subsystem from the powertrain system. The default implementation applies this torque to the driveline's driveshaft.
Reimplemented in chrono::vehicle::ChSimpleDrivelineXWD, chrono::vehicle::ChSimpleDriveline, chrono::vehicle::gator::Gator_SimpleDriveline, and chrono::vehicle::generic::Generic_SimpleDriveline.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/ChDrivelineWV.h
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/ChDrivelineWV.cpp
