Table of Contents
Motors are objects that can be used to move one part respect to the other; they are used to represent robotic actuators, engines, etc.
In general, you should consider using motors all the times that you need to control the motion of an object respect to another. The demo_motors provides a good set of examples on their use.
There are various types of motors in Chrono: the most relevant distinction being between motors that provide rotation between 3D parts, motors that provide linear motion between 3D parts, and motors that provide motion between simplified 1D objects.
Depending on the application, it may be enough to enforce a precise angular velocity (ex. when simulating a rotating mixer), in other cases you many need to enforce a precise angle or position between two parts (ex. when simulating robots and automation, if assuming that actuators do not have compliance and the control is infinitely stiff), and in other cases you may want to enforce a torque/force load between the parts, and delegate the motion control to more sophisticated algorithms. All these modes are supported in Chrono, and are summarized in this table:
| . | 3D rotational motors | 3D linear motors | 1D motors for drivelines |
|---|---|---|---|
| Impose displacement | ChLinkMotorRotationAngle | ChLinkMotorLinearPosition | ChShaftsMotorAngle |
| Impose speed | ChLinkMotorRotationSpeed | ChLinkMotorLinearSpeed | ChShaftsMotorSpeed |
| Impose load | ChLinkMotorRotationTorque | ChLinkMotorLinearForce | ChShaftMotorTorque |
| Connect to 1D driveline | ChLinkMotorRotationDriveline | ChLinkMotorLinearDriveline | - |
3D rotational motors
These motors connect two parts of class chrono::ChLinkBodyFrame, i.e objects that have translation+rotation in space, for example chrono::ChBody or chrono::fea::ChNodeFEAxyzrot.
All rotational motors are inherited from chrono::ChLinkMotorRotation. All rotational motors assume that a part A rotates about a part B, where rotation axes are the Z directions of two auxiliary frames F1 and F2 connected to the two parts, so we consider the Z axis for the frames to be the "spindle" of the motor:
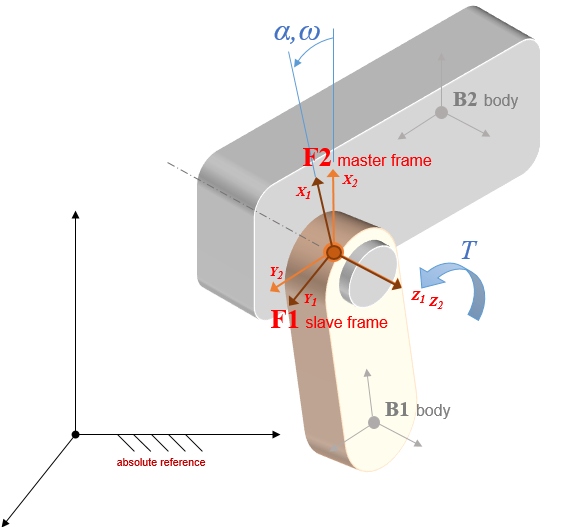
Reactions and joint rotations/velocities are computed with respect to the master frame, that is frame F2. For example use ChLinkMotorRotation::GetMotorRot(), ChLinkMotorRotation::GetMotorRot_dt() and ChLinkMotorRotation::GetMotorRot_dtdt() to get the current motor angle, angular velocity, angular acceleration. Note that the angle is computed by keeping track of multiple rotations, so it is not limited in the -PI..+PI periodic range; otherwise you might use GetMotorRotPeriodic() and GetMotorRotTurns().
Note that angles are considered in [rad], not in degrees!. Ex. a 180° turn = PI [rad] = 3.1415 [rad] etc. Same for angular velocity, that is [rad/s], and angular acceleration, that is in [rad/s^2].
By default, all rotational motors also provide a revolute constraint for the other relative degrees of freedom (translation about X,Y,Z and rotation about RX and RY, except rotation RZ that is the one controlled by the motor) so you do not need to create additional joints, like ChLinkLockRevolute for example, to keep the two parts together. Anyway, if you prefer, this behavior can be changed by using the ChLinkMotorRotation::SetSpindleConstraint() function, that can accept the following options:
- FREE : enforces no constraint on spindle direction/alignment
- REVOLUTE: enforces X,Y,Z, RX, RY constraints (default)
- CYLINDRICAL: enforces X,Y, RX, RY constraints
- OLDHAM: enforces RX, RY constraints
There are four types of rotational motors inherited from ChLinkMotorRotation, discussed more in detail in the following sections:
- chrono::ChLinkMotorRotationAngle, that enforces a rotation on Z as a angle(time) function,
- chrono::ChLinkMotorRotationSpeed, that enforces a rotation on Z as a speed(time) function,
- chrono::ChLinkMotorRotationTorque, that applies a torque(time) load between the two parts, about Z,
- chrono::ChLinkMotorRotationDriveline, that connects the 3D rotation between the two parts about Z, to a 1D driveline of your choice, modeled with chrono::ChShaft 1D elements connected by one or more 1D motors/clutches/gears/etc.
In general, the process of adding a motor involves the following steps:
- Create the motor from the desired ChLinkMotorXxxyyy class
- Use
mymotor->Initialize(…)to connect two parts, specifying the motor frame in absolute coordinates - Add the motor to a ChSystem
- Optional: depending on link type, set link properties. Most often this means setting some chrono::ChFunction object for the motor speed or angle etc.
Example:
In the following sub-sections you can find additional informations about the various types of rotational motors.
ChLinkMotorRotationAngle
The chrono::ChLinkMotorRotationAngle motor imposes angle between parts.
This is a simple but very useful type of rotational actuator. It assumes that you know the exact angular angle of the rotor respect to the stator, as a function of time:
\[ \alpha = f(t) \]
Use this to simulate servo drives in robotic systems and automation, where you can assume that the motor rotates with an infinitely stiff and reactive control, that exactly follows your prescribed motion profiles.
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the angle constraint; no compliance is allowed, this means that if the rotating body hits some hard contact, the solver might give unpredictable oscillatory or diverging results because of the contradiction.
The angle is provided by an object of class chrono::ChFunction, that returns the angle (in [rad]) as a function of time. Use SetAngleFunction() to set such function.
Example:
ChLinkMotorRotationSpeed
The chrono::ChLinkMotorRotationSpeed motor imposes angular speed between parts.
This is one of the simplest types of rotational actuators. It assumes that you know the exact angular speed of the rotor respect to the stator, as a function of time:
\[ \omega = f(t), \quad \omega = \frac{d\alpha}{dt} \]
This type of motor is helpful when you need to simulate fans, rotating cranks, wheeled robots, etc., where you are not so interested in actual rotation angle, but you rather focus on speed.
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the speed constraint;
therefore no compliance is allowed and this means that if the rotating body hits some hard contact, the solver might give unpredictable oscillatory or diverging results because of the contradiction.
The angular speed is provided by an object of class chrono::ChFunction, that returns the angular speed (in [rad/s]) as a function of time. Use SetSpeedFunction() to set such function.
Example:
The ChLinkMotorRotationSpeed contains a hidden state that performs the time integration of the angular speed setpoint: \( \alpha(t) = \int_0^t \omega dt \). Such angle is then imposed to the constraint at the positional level too, thus avoiding angle error accumulation (angle drift). Optionally, such positional constraint level can be disabled as follows:
ChLinkMotorRotationTorque
The chrono::ChLinkMotorRotationTorque motor imposes torque between parts.
For this motor, you must specify a time-dependent torque as:
\[ T = f(t) \]
The torque is provided by an object of class chrono::ChFunction, that returns the Torque (in [Nm]) as a function of time. Use SetTorqueFunction() to set such function.
The torque, if constant, will accelerate indefinitely the spindle: it would have little use. So you may need to implement some time-varying torque. This lead us to two interesting, yet advanced, uses of this motor:
- you may provide a custom function implemented by yourself (inheriting from chrono::ChFunction) where its Get_y() member returns a torque that changes not only because of time, but also because of other information: for example you can implement a torque(speed) function to represent a three phase induction motor,
- you may continuously adjust the value of the torque at each step of the simulation, to simulate a PID controller, or a man-in-the-loop system, or other controllers; this can be achieved at least in two ways:
- provide a custom custom function inherited from chrono::ChFunction_SetpointCallback, where you implement the SetpointCallback() method (containing code that computes torque T, automatically called at each timestep);
- or just use a concrete chrono::ChFunction_Setpoint function, in this case you just have to manually call myfunction->SetSetpoint(...) in your simulation loop
ChLinkMotorRotationDriveline
The chrono::ChLinkMotorRotationDriveline motor can embed a complex 1D driveline.
This is the most powerful motor type. It allows the creation of generic 1D powertrain inside this 3D motor. Think at this driveline as an invisible set of one-dimensional shafts, reducers, motors, that connect the rotational degree of freedom of part A and the rotational degree of freedom of part B.
Powertrains/drivelines are defined by connecting a variable number of 1D objects such as chrono::ChShaft, chrono::ChClutch, chrono::ChShaftsMotor, etc. In this way, for example, you can represent a drive+flywheel+reducer, hence taking into account of the inertia of the flywheel without the complication of adding a full 3D shape that represents the flywheel, and withoput needing 3D constraint for gears, bearings, etc.
The 1D driveline is "interfaced" to the two connected three-dimensional parts using two "inner" 1D shafts, each rotating as the connected 3D part; it is up to the user to build the driveline that connects those two shafts.
Some guidelines:
- In order to connect the two 3D parts to the 1D powertrain, you must use two invisible "inner shafts" of chrono::ChShaft class, that you can access via mymotor->GetInnerShaft1() and mymotor->GetInnerShaft2().
- Most often the driveline is like a graph starting at inner shaft 2 (consider it to be the truss for holding the motor drive, also the support for reducers if any) and ending at inner shaft 1 (consider it to be the output, i.e. the slow-rotation spindle).
- You may want to change the inertia of "inner" 1D shafts, (each has default 1kg/m^2).
- Note: they adds up to 3D inertia when 3D parts rotate about the link shaft.
- Note: do not use too small values compared to 3D inertias: it might negatively affect the precision of some solvers; this is especially true with the default SOR solver, and less critical with BARZILAIBORWEIN or APGD or MKL solvers. Hint: if you have troubles with the precision of the solver, rather diminish the 3D inertia of stator/rotor parts and increase the inertia of the inner shafts.
- In general, the default SOR solver might have difficulties converging if you mix very low-inertia parts with high-inertia parts in the driveline, for example if you model a motor+reducer where the motor has a very small inertia. Either you increase the iteration number or you switch to more advanced (but slower) solvers such as APGD, BARZILAIBORWEIN or MKL. Anyway, in well-designed actuators for robotic applications with high dynamics, the reduced inertia of the fast motor spindle is always comparable to the inertia of the moving load at the output spindle of the reducer, \( 1/\tau^2 J_{mot}\approx J_{load}\) so the problem is not so perceptible.
- look at the manual for 1D motors to understand which types of 1D motors you can embed in the driveline; they can work at angle/speed/torque level, just like their 3D counterparts.
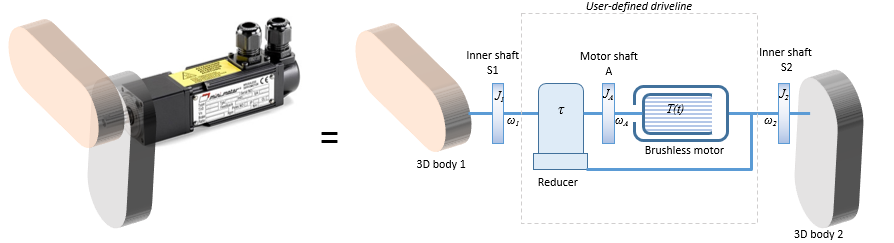
In the following example we will create a hidden 1D driveline made with a 1D motor and a 1D reducer (gearbox with transmission ratio \( \tau \)), as often happens in robotic applications. The following picture shows the topology of the driveline that we will create:
3D linear motors
These motors connect two parts of class chrono::ChLinkBodyFrame, i.e objects that have translation+rotation in space, for example chrono::ChBody or chrono::fea::ChNodeFEAxyzrot.
All linear motors are inherited from chrono::ChLinkMotorLinear. They assume that a part A translates about a part B, where the guide is the X direction of the auxiliary frame F2, and the slider is the auxiliary frame F1; both frames being connected to the respective body.
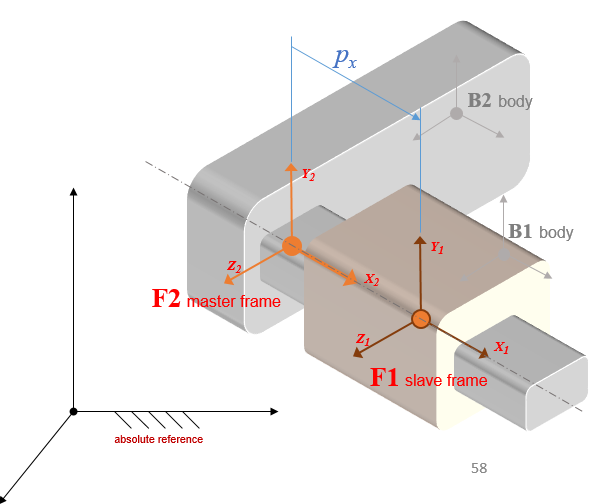
Reactions and joint rotations/velocities are computed with respect to the master frame, that is frame F2. For example use ChLinkMotorLinear::GetMotorPos(), ChLinkMotorRotation::GetMotorPos_dt() and ChLinkMotorRotation::GetMotorPos_dtdt() to get the current motor displacement, velocity, acceleration.
By default, all linear motors also provide a prismatic constraint for the other relative degrees of freedom (translation about Y,Z and rotation about RX, RY, **RZ, except rotation translation Z that is the one controlled by the motor) so you do not need to create additional joints, like ChLinkLockPrismatic for example, to keep the two parts together. Anyway, if you prefer, this behavior can be changed by using the ChLinkMotorLinear::SetGuideConstraint() function, that can accept the following options:
- FREE : enforces no constraint on roller direction/alignment
- PRISMATIC: enforces Y,Z, RX, RY, RZ constraints (default)
- SPHERICAL: enforces Y,Z constraints
There are four types of rotational motors inherited from ChLinkMotorLinear, discussed more in detail in the following sections:
- chrono::ChLinkMotorLinearPosition, that enforces a motion on X as a position(time) function,
- chrono::ChLinkMotorLinearSpeed, that enforces a motion on X as a speed(time) function,
- chrono::ChLinkMotorLinearForce, that applies a force(time) load between the two parts, about X,
- chrono::ChLinkMotorLinearDriveline, that connects the 3D motion between the two parts about X, to a 1D driveline of your choice, modeled with chrono::ChShaft 1D elements connected by one or more 1D motors/clutches/gears/etc.
In general, the process of adding a motor involves the following steps:
- Create the motor from the desired ChLinkMotorLinearXxxyyy class
- Use
mymotor->Initialize(…)to connect two parts, specifying the motor frame in absolute coordinates - Add the motor to a ChSystem
- Optional: depending on link type, set link properties. Most often this means setting some chrono::ChFunction object for the motor speed or position etc.
In the following sub-sections you can find additional informations about the various types of rotational motors.
ChLinkMotorLinearPosition
The chrono::ChLinkMotorLinearPosition motor imposes a displacement between parts.
This is a simple but very useful type of linear actuator. It assumes that you know the exact position of the slider along the X axis of the guide, \( p_x \) as a function of time:
\[ p_x = f(t) \]
Use this to simulate linear actuators in robotic systems and automation, where you can assume that the slider moves with an infinitely stiff and reactive control that exactly follows your prescribed motion profile. (in a real world this is just an approximation, because even the best motor will have some oscillatory behavior around the desired setpoint, as the control system have some compliance and latency; yet if this can be neglected, this motor is the best choice).
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the displacement constraint; no compliance is allowed, this means that if the sliding body hits some hard contact, the solver might give unpredictable oscillatory or diverging results because of the contradiction.
The position is provided by an object of class chrono::ChFunction, that returns the position (in [m]) as a function of time. Use SetPositionFunction() to set such function.
Example:
ChLinkMotorLinearSpeed
The chrono::ChLinkMotorLinearSpeed motor imposes a speed between parts.
This is one of the simplest types of linear actuators. It assumes that you know the exact speed of the slider along the X direction of the guide, \( v_x \) as a function of time:
\[ v_x = f(t), \quad v_x = \frac{dp_x}{dt} \]
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the speed constraint;
therefore no compliance is allowed and this means that if the sliding body hits some hard contact, the solver might give unpredictable oscillatory or diverging results because of the contradiction.
The speed is provided by an object of class chrono::ChFunction, that returns the speed (in [m/s]) as a function of time. Use SetSpeedFunction() to set such function.
Example:
The ChLinkMotorLinearSpeed contains a hidden state that performs the time integration of the speed setpoint: \( p_x(t) = \int_0^t v_x dt \). Such \( p_x \) is then imposed to the constraint at the positional level too, thus avoiding error accumulation (position drift). Optionally, such positional constraint level can be disabled as follows:
ChLinkMotorLinearForce
The chrono::ChLinkMotorLinearForce motor imposes a force between parts.
For this motor, you must specify a time-dependent force as:
\[ F = f(t) \]
The force is provided by an object of class chrono::ChFunction, that returns the Torque (in [Nm]) as a function of time. Use SetForceFunction() to set such function.
The force, if constant, will accelerate indefinitely the slider: it would have little use. Similarly, an "open loop" option is to provide a nonlinear \( F(t) \) at the beginning (ex using a feedforward model), but then there is no guarantee about the precise position of the slider, when the simulation runs.
This means that, unless you update the force F at each time step using some type of feedback controller, this actuator cannot be used to follow some position setpoint. Implementing your controller might complicate things, but it could be closer to the behavior of a real actuator, that have some delay, bandwidth latency and compliance - for example, differently from other types such as ChLinkMotorLinearPosition and ChLinkMotorLinearSpeed, this force motor does not enforce any constraint on the direction of motion, so if it the slider hits some hard contact, it just stops and keeps pushing, and no troubles with the solver happen.
So you may need to implement some time-varying force. Exactly as happens for the ChLinkMotorRotationTorque, this lead us to two interesting and advanced uses of this motor:
- you may provide a custom function implemented by yourself (inheriting from chrono::ChFunction) where its Get_y() member returns a torque that changes not only because of time, but also because of other information: for example you can implement a force(speed) function to represent a three phase induction motor plus a ballscrew reducer,
- you may continuously adjust the value of the torque at each step of the simulation, to simulate a PID controller, or a man-in-the-loop system, or other controllers; this can be achieved at least in two ways:
- provide a custom custom function inherited from chrono::ChFunction_SetpointCallback, where you implement the SetpointCallback() method (containing code that computes torque T, automatically called at each timestep);
- or just use a concrete chrono::ChFunction_Setpoint function, in this case you just have to manually call myfunction->SetSetpoint(...) in your simulation loop
An example is represented here, that is a PID controller implemented using the approach of a ChFunction_SetpointCallback:
ChLinkMotorLinearDriveline
The chrono::ChLinkMotorLinearDriveline motor can embed a complex 1D driveline.
This is the most powerful linear motor type. It allows the creation of generic 1D powertrain inside this 3D motor. Think at this driveline as an invisible set of one-dimensional shafts, reducers, motors, that connect the translational degree of freedom of part A and the rotational degree of freedom of part B.
Powertrains/drivelines are defined by connecting a variable number of 1D objects such as chrono::ChShaft, chrono::ChClutch, chrono::ChShaftsMotor, etc. In this way, for example, you can represent a drive+flywheel+reducer+pulley, hence taking into account of the inertia of the flywheel without the complication of adding a full 3D shape that represents the flywheel, and withoput needing 3D constraint for gears, bearings, etc.
The 1D driveline is "interfaced" to the two connected three-dimensional parts using two "inner" 1D shafts, each representing the 1 DOF for the translation of the connected 3D part along the guide direction; it is up to the user to build the driveline that connects those two shafts.
Some guidelines:
- In order to connect the two 3D parts to the 1D powertrain, you must use two invisible "inner shafts" of chrono::ChShaft class, that you can access via mymotor->GetInnerShaft1lin() and mymotor->GetInnerShaft2lin().
- Note: in the part 2 there is an additional inner shaft that operates on rotation; this is needed because, for example, maybe you want to model a driveline like a drive+screw; you will anchor the drive to part 2 using this rotational shaft; so reaction torques arising because of inner flywheel accelerations can be transmitted to this shaft. Use mymotor->GetInnerShaft2rot() to access it.
- Most often the driveline is like a graph starting at inner shaft 2 (consider it to be the truss of the linear guide, that holds the motor drive and supports for reducers if any) and ending at inner shaft 1 (consider it to be the output, i.e. the slider).
- You may want to change the inertia of "inner" 1D shafts, (each has default 1kg).
- Note: they adds up to 3D inertia when 3D parts translate about the guide.
- Note: do not use too small values compared to 3D inertias: it might negatively affect the precision of some solvers; this is especially true with the default SOR solver, and less critical with BARZILAIBORWEIN or APGD or MKL solvers. Hint: if you have troubles with the precision of the solver, rather diminish the 3D inertia of guide/slider parts and increase the inertia of the inner shafts.
- In general, the default SOR solver might have difficulties converging if you mix very low-inertia parts with high-inertia parts in the driveline, for example if you model a motor+reducer where the motor has a very small inertia. Either you increase the iteration number or you switch to more advanced (but slower) solvers such as APGD, BARZILAIBORWEIN or MKL. Anyway, in well-designed actuators for robotic applications with high dynamics, the reduced inertia of the fast motor spindle is always comparable to the inertia of the moving load at the output spindle of the reducer, \( 1/\tau^2 J_{mot}\approx J_{load}\) so the problem is not so perceptible.
- look at the manual for 1D motors to understand which types of 1D motors you can embed in the driveline; they can work at position/speed/force level, just like their 3D counterparts.
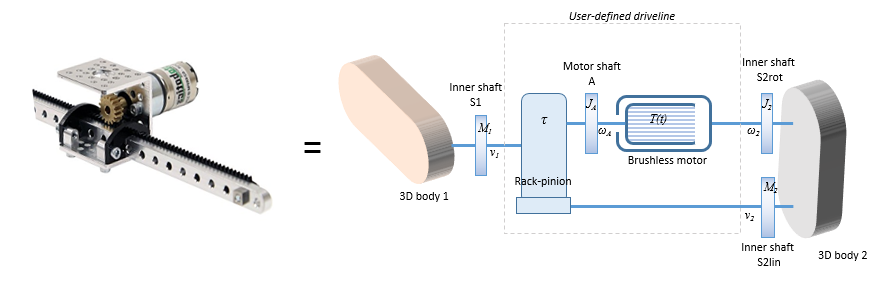
In the following example we will create a hidden 1D driveline made with a 1D motor and a 1D reducer (rack-pinion with transmission ratio \( \tau \)), as often happens in robotic applications. The following picture shows the topology of the driveline that we will create:
In this example, also, we'll use a motion profile that consists in a cubic ascending ramp, a pause, a descending ramp, a pause, and then repeated forever; to this end we'll use chrono::ChFunction_Sequence and chrono::ChFunction_Repeat
1D motors
These motors are used for building schematic drivelines using 1D parts of class chrono::ChShaft, i.e. objects that have only a degree of freedom (ex. the rotation angle) and an inertia.
Drivelines can be used also in chrono::ChLinkMotorRotationDriveline and ChLinkMotorLinearDriveline, interfacing them with 3D parts.
There are three types of 1D motors inherited from ChShaftsMotor, and they discussed more in detail in the following sections:
- chrono::ChShaftsMotorAngle, that enforces a rotation on Z as a angle(time) function,
- chrono::ChShaftsMotorSpeed, that enforces a rotation on Z as a speed(time) function,
- chrono::ChShaftsMotorTorque, that applies a torque(time) load between the two shafts,
In general, the process of adding a 1D motor involves the following steps:
- Create the motor from the desired ChShaftMotorXxxyyy class
- Use
mymotor->Initialize(…)to connect two ChShaft objects, - Add the motor to a ChSystem
- Optional: depending on link type, set link properties. Most often this means setting some chrono::ChFunction object for the motor speed or angle or torque etc.
In the following sub-sections you can find additional informations about the various types of rotational motors.
ChShaftsMotorAngle
The chrono::ChShaftsMotorAngle motor imposes an angle, in [rad], between two chrono::ChShafts objects.
This is a simple but very useful type of rotational actuator. It assumes that you know the exact angular angle of the rotor respect to the stator, as a function of time:
\[ \alpha = f(t) \]
Note: most often a ChShaft represent a 1DOF rotation, with rotational inertia [kg/m^2], but given the dimension-less design of Chrono, if you need you can also consider it as a 1DOF translation, with linear inertia [m] like for a translating one degree of freedom. In this case, the chrono::ChShaftsMotorAngle would represent an imposed position displacement [m].
Use this to simulate servo drives in robotic systems and automation, where you can assume that the motor rotates with an infinitely stiff and reactive control, that exactly follows your prescribed motion profiles.
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the angle constraint; no compliance is allowed.
The angle is provided by an object of class chrono::ChFunction, that returns the angle (in [rad]) as a function of time. Use SetAngleFunction() to set such function.
ChShaftsMotorSpeed
The chrono::ChShaftsMotorSpeed motor imposes speed between two chrono::ChShafts objects.
This is one of the simplest types of rotational actuators. It assumes that you know the exact angular speed of the rotor respect to the stator, as a function of time:
\[ \omega = f(t), \quad \omega = \frac{d\alpha}{dt} \]
This type of motor is helpful when you need to simulate fans, rotating cranks, wheeled robots, etc., where you are not so interested in actual rotation angle, but you rather focus on speed.
Note: this is a rheonomic motor, i.e. it generates the motion geometrically by strictly enforcing the speed constraint;
therefore no compliance is allowed.
The angular speed is provided by an object of class chrono::ChFunction, that returns the angular speed (in [rad/s]) as a function of time. Use SetSpeedFunction() to set such function.
The ChShaftsMotorSpeed contains a hidden state that performs the time integration of the angular speed setpoint: \( \alpha(t) = \int_0^t \omega dt \). Such angle is then imposed to the constraint at the positional level too, thus avoiding angle error accumulation (angle drift). Optionally, such positional constraint level can be disabled as follows:
ChShaftsMotorTorque
The chrono::ChShaftsMotorTorque motor imposes torque between two chrono::ChShafts objects.
For this motor, you must specify a time-dependent torque as:
\[ T = f(t) \]
The torque is provided by an object of class chrono::ChFunction, that returns the Torque (in [Nm]) as a function of time. Use SetTorqueFunction() to set such function.
The torque, if constant, will accelerate indefinitely the spindle: it would have little use. So you may need to implement some time-varying torque. This lead us to two interesting, yet advanced, uses of this motor:
- you may provide a custom function implemented by yourself (inheriting from chrono::ChFunction) where its Get_y() member returns a torque that changes not only because of time, but also because of other information: for example you can implement a torque(speed) function to represent a three phase induction motor,
- you may continuously adjust the value of the torque at each step of the simulation, to simulate a PID controller, or a man-in-the-loop system, or other controllers; this can be achieved at least in two ways:
- provide a custom custom function inherited from chrono::ChFunction_SetpointCallback, where you implement the SetpointCallback() method (containing code that computes torque T, automatically called at each timestep);
- or just use a concrete chrono::ChFunction_Setpoint function, in this case you just have to manually call myfunction->SetSetpoint(...) in your simulation loop
How to control motors
A typical scenario is where you want to control an actuator during the simulation. The basic behavior of the motors described above is not enough, as the simple approach of setting positions as function of time is something that can be done once at the beginning of the simulation, and it does not support run-time updates. Here we discuss how to implement run-time control of motors: this can happen, for instance, in the following cases:
- for man-in-the-loop interactive simulations, for instance in videogames, where someone operates on a joystick in order to steer the wheels, or to drive the arm of an excavator, etc.
- for hardware-in-the-loop simulations, where the actuator rotation (or speed, or torque, etc.) depends on the input from some external device
- for simulation of closed-loop control like PID controllers, digital servos with feedback algorithms, etc.
- etc.
In all these cases, the common denominator is that you need to change the motor properties continuously during the simulation. There are many ways to do this, but here we list the suggested approaches:
- Constraint-based approach.
- First create a motor that imposes position exactly via a constraint, that is one of the following:
- chrono::ChLinkMotorRotationAngle, if you deal with a rotational actuator
- chrono::ChLinkMotorLinearPosition, if you deal with a linear actuator
- whatever constraint that interfaces with a 1D driveline (chrono::ChLinkMotorRotationDriveline or chrono::ChLinkMotorLinearDriveline), then add a chrono::ChShaftsMotorAngle in the driveline.
- You might be tempted to use a ChFunction_Const for the angle/position, and then continuously change its value using myfunct->Set_yconst() during the simulation loop: this would work only roughly, because these constraint-based motors require also the derivative in order to work smoothly. So the proper ways to control the angle/position of the motor, with automatic computation of derivative of the setpoint, is one of the following:
- provide a custom custom function inherited from chrono::ChFunction_SetpointCallback, where you implement the SetpointCallback() method (containing code that computes angle/position, automatically called at each timestep);
- or just use a concrete chrono::ChFunction_Setpoint function, in this case you just have to manually call myfunction->SetSetpoint(...) in your simulation loop, specifying the angle/position.
- First create a motor that imposes position exactly via a constraint, that is one of the following:
- Load-based approach
- First create a motor that applies a load, that is one of the following:
- chrono::ChLinkMotorRotationTorque, if you deal with a rotational actuator
- chrono::ChLinkMotorLinearForce, if you deal with a linear actuator
- whatever constraint that interfaces with a 1D driveline (chrono::ChLinkMotorRotationDriveline or chrono::ChLinkMotorLinearDriveline), then add a chrono::ChShaftsMotorTorque in the driveline.
- Use SetMotorForce() or SetMotorTorque() methods and pass one of the following:
- provide a custom custom function inherited from chrono::ChFunction_SetpointCallback, where you implement the SetpointCallback() method (containing code that computes torque/force, automatically called at each timestep);
- or just use a concrete chrono::ChFunction_Setpoint function, in this case you just have to manually call myfunction->SetSetpoint(...) in your simulation loop, specifying the torque/force.
- First create a motor that applies a load, that is one of the following:
The constraint-based approach is suggested if you need a very efficient and idealized actuator model, and you do not care about the control model: the motor reacts instantly to your input, regardless if in real life the control system would be able to reach the set-point or not (assumption of infinitely reactive, infinitely stiff control). Ex: videogames, real-time simulators, etc.
Remember that a side effect of constraint-based motors is that if the moving parts hit some immovable obstacles you may fall into a contradictory situation where constraints cannot be satisfied at once, so the solver might give oscillatory or unstable results.
The load-based approach is suggested if you want to introduce a control model, usually a closed-loop PID controller. It is up to you to compute a position setpoint, to compute the current error, and to compute the PID control output to be used in the motor as a torque/force setpoint.
Since a controller must be implemented, the load-based approach is more complicate; however there is the benefit of a more realistic behavior of the actuator (the motion has oscillatory errors, delays, latencies, overshooting, elastic compliance, etc. exactly in a real servo actuator). Also, differently from constraint-based motors, you do not have problems in case the moving parts hit some immovable obstacles, as there are no contradictions with other constraints.
Examples
See also:
