chrono::vehicle::ChTrackShoeSegmented Class Referenceabstract
Description
Base class for segmented track shoes.
These are track shoes modeled with one or more rigid bodies connected through joints and/or bushings.
#include <ChTrackShoeSegmented.h>
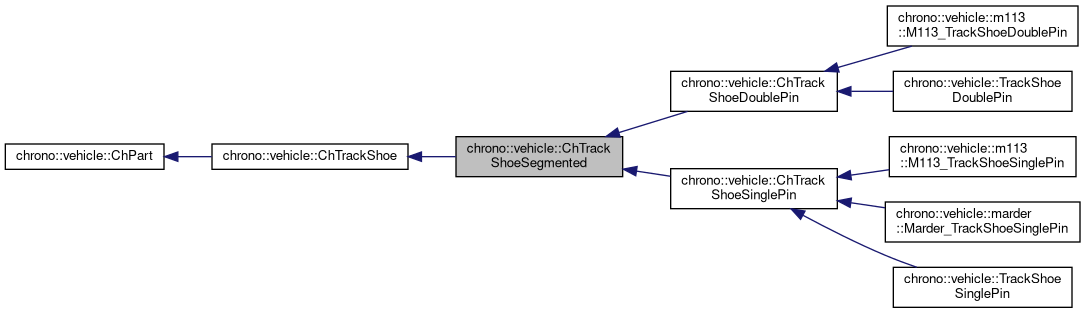
Inheritance diagram for chrono::vehicle::ChTrackShoeSegmented:
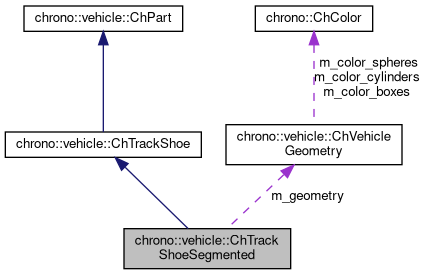
Collaboration diagram for chrono::vehicle::ChTrackShoeSegmented:
Public Member Functions | |
| std::shared_ptr< ChMaterialSurface > | GetSprocketContactMaterial () const |
| Get the contact material for the track shoe part interacting with the sprocket. | |
 Public Member Functions inherited from chrono::vehicle::ChTrackShoe Public Member Functions inherited from chrono::vehicle::ChTrackShoe | |
| ChTrackShoe (const std::string &name) | |
| virtual GuidePinType | GetType () const =0 |
| Return the type of track shoe (guiding pin). More... | |
| size_t | GetIndex () const |
| Get the index of this track shoe within its containing track assembly. | |
| std::shared_ptr< ChBody > | GetShoeBody () const |
| Get a handle to the shoe body. | |
| virtual double | GetHeight () const =0 |
| Return the height of the track shoe. | |
| virtual double | GetPitch () const =0 |
| Return the pitch length of the track shoe. More... | |
| virtual double | GetMass () const =0 |
| Get the mass of the track shoe assembly. | |
| virtual ChVector | GetLateralContactPoint () const =0 |
| Return the location for lateral contact with the sprocket, expressed in the shoe reference frame. More... | |
| void | SetCollide (bool val) |
| Turn on/off collision flag for the shoe body. | |
| virtual void | Initialize (std::shared_ptr< ChBodyAuxRef > chassis, const ChVector<> &location, const ChQuaternion<> &rotation)=0 |
| Initialize this track shoe subsystem. More... | |
| Public Member Functions inherited from chrono::vehicle::ChPart | |
| ChPart (const std::string &name) | |
| Construct a vehicle subsystem with the specified name. More... | |
| const std::string & | GetName () const |
| Get the name identifier for this subsystem. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this subsystem. | |
| virtual std::string | GetTemplateName () const =0 |
| Get the name of the vehicle subsystem template. | |
| void | SetVisualizationType (VisualizationType vis) |
| Set the visualization mode for this subsystem. | |
| virtual void | SetOutput (bool state) |
| Enable/disable output for this subsystem. | |
| bool | OutputEnabled () const |
| Return the output state for this subsystem. | |
| virtual void | ExportComponentList (rapidjson::Document &jsonDocument) const |
| Export this subsystem's component list to the specified JSON object. More... | |
| virtual void | Output (ChVehicleOutput &database) const |
| Output data for this subsystem's component list to the specified database. | |
Protected Member Functions | |
| ChTrackShoeSegmented (const std::string &name) | |
| virtual void | CreateContactMaterials (ChContactMethod contact_method)=0 |
| Create the contact materials for the shoe, consistent with the specified contact method. More... | |
| virtual void | AddVisualizationAssets (VisualizationType vis) override |
| Add visualization assets for the track shoe subsystem. | |
| virtual void | RemoveVisualizationAssets () override |
| Remove visualization assets for the track shoe subsystem. | |
| Protected Member Functions inherited from chrono::vehicle::ChTrackShoe | |
| void | SetIndex (size_t index) |
| Set the index of this track shoe within its containing track assembly. | |
| virtual void | Connect (std::shared_ptr< ChTrackShoe > next, ChTrackAssembly *assembly, bool ccw)=0 |
| Connect this track shoe to the specified neighbor. More... | |
| Protected Member Functions inherited from chrono::vehicle::ChPart | |
| virtual void | Create (const rapidjson::Document &d) |
| Create a vehicle subsystem from JSON data. More... | |
Protected Attributes | |
| ChVehicleGeometry | m_geometry |
| collection of visualization and collision shapes | |
| std::shared_ptr< ChMaterialSurface > | m_shoe_sprk_material |
| contact material for shoe shape contacting sprocket | |
| Protected Attributes inherited from chrono::vehicle::ChTrackShoe | |
| size_t | m_index |
| index of this track shoe within its containing track assembly | |
| std::shared_ptr< ChBody > | m_shoe |
| handle to the shoe body | |
| Protected Attributes inherited from chrono::vehicle::ChPart | |
| std::string | m_name |
| subsystem name | |
| bool | m_output |
| specifies whether or not output is generated for this subsystem | |
Additional Inherited Members | |
| Static Public Member Functions inherited from chrono::vehicle::ChPart | |
| static ChMatrix33 | TransformInertiaMatrix (const ChVector<> &moments, const ChVector<> &products, const ChMatrix33<> &vehicle_rot, const ChMatrix33<> &body_rot) |
| Utility function for transforming inertia tensors between centroidal frames. More... | |
| Static Protected Member Functions inherited from chrono::vehicle::ChPart | |
| static void | ExportBodyList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChBody >> bodies) |
| Export the list of bodies to the specified JSON document. | |
| static void | ExportShaftList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaft >> shafts) |
| Export the list of shafts to the specified JSON document. | |
| static void | ExportJointList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLink >> joints) |
| Export the list of joints to the specified JSON document. | |
| static void | ExportCouplesList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftsCouple >> couples) |
| Export the list of shaft couples to the specified JSON document. | |
| static void | ExportMarkerList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChMarker >> markers) |
| Export the list of markers to the specified JSON document. | |
| static void | ExportLinSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkTSDA >> springs) |
| Export the list of translational springs to the specified JSON document. | |
| static void | ExportRotSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkRotSpringCB >> springs) |
| Export the list of rotational springs to the specified JSON document. | |
| static void | ExportBodyLoadList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLoadBodyBody >> loads) |
| Export the list of body-body loads to the specified JSON document. | |
Member Function Documentation
◆ CreateContactMaterials()
|
protectedpure virtual |
Create the contact materials for the shoe, consistent with the specified contact method.
A derived class must set m_shoe_sprk_material (used for contact with the sprocket) and m_shoe_materials which must include one or more contact materials for the collision shapes of the shoe itself (for contact with the wheels, idler, and ground).
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/tracked_vehicle/track_shoe/ChTrackShoeSegmented.h
- /builds/uwsbel/chrono/src/chrono_vehicle/tracked_vehicle/track_shoe/ChTrackShoeSegmented.cpp
