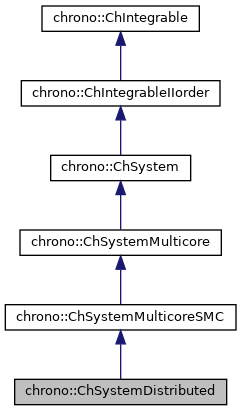
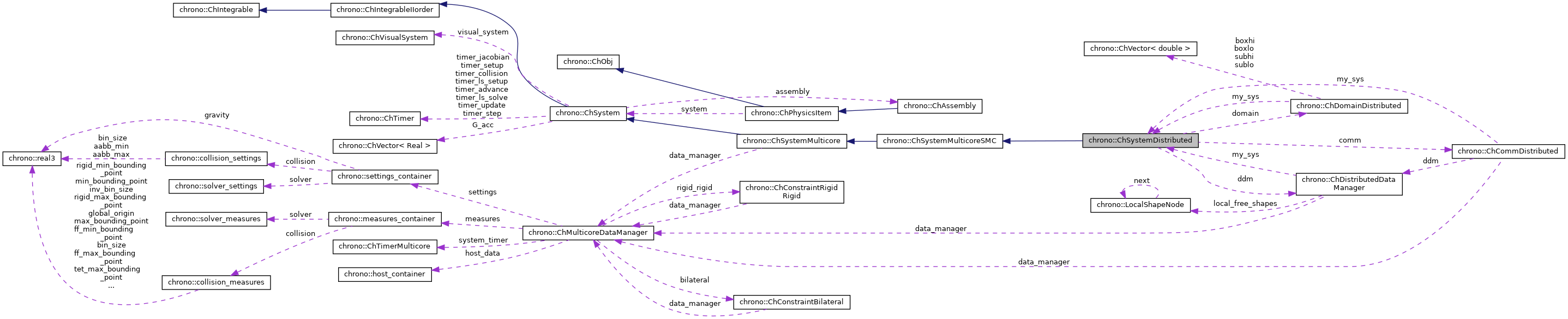
Description
This is the main user interface for Chrono::Distributed Add bodies and set all settings through the system.
The simulation runs on all ranks given in the world parameter.
#include <ChSystemDistributed.h>
Classes | |
| struct | BodyState |
| Stores all data needed to fully update the state of a body. More... | |
| struct | TriData |
| Structure of vertex data for a triangle in the bodies existing local frame. More... | |
Public Types | |
| typedef struct chrono::ChSystemDistributed::BodyState | BodyState |
| Stores all data needed to fully update the state of a body. | |
| typedef struct chrono::ChSystemDistributed::TriData | TriData |
| Structure of vertex data for a triangle in the bodies existing local frame. | |
Public Member Functions | |
| ChSystemDistributed (MPI_Comm communicator, double ghostlayer, unsigned int maxobjects) | |
| Construct a distributed Chrono system using the specified MPI communicator. | |
| MPI_Comm | GetCommunicator () const |
| Return the system's MPI intra-communicator. | |
| int | GetCommSize () const |
| Return the size of the group associated with the system's intra-communicator. | |
| int | GetCommRank () const |
| Return the rank of the calling process in the system's intra-communicator. | |
| void | SetMaster () |
| Set the calling process as 'master' in the intra-communicator used by this system. More... | |
| int | GetMasterRank () const |
| Return the rank (in the system's intra-communicator) of the process marked as 'master'. More... | |
| bool | OnMaster () const |
| Return true if the calling process is the one marked as 'master'. | |
| void | SetGhostLayer (double ghostlayer) |
| Set the distance into the neighboring sub-domain that is considered shared. | |
| double | GetGhostLayer () const |
| Return the distance into the neighboring sub-domain that is considered shared. | |
| unsigned int | GetNumBodiesGlobal () const |
| Return the current global number of bodies in the system. | |
| bool | InSub (const ChVector< double > &pos) const |
| Return true if pos is within this rank's sub-domain. | |
| virtual ChBody * | NewBody () override |
| Create a new body, consistent with the contact method and collision model used by this system. More... | |
| virtual ChBodyAuxRef * | NewBodyAuxRef () override |
| Create a new body with non-centroidal reference frame, consistent with the contact method and collision model used by this system. More... | |
| virtual void | AddBody (std::shared_ptr< ChBody > newbody) override |
| Add a body to the system. More... | |
| void | AddBodyAllRanks (std::shared_ptr< ChBody > body) |
| Add a body to the system on all ranks, regardless of its location. More... | |
| virtual void | RemoveBody (std::shared_ptr< ChBody > body) override |
| Remove a body from the simulation based on the ID of the body (not based on object comparison between ChBodys). More... | |
| virtual bool | Integrate_Y () override |
| Wraps the super-class Integrate_Y call and introduces a call that carries out all inter-rank communication. | |
| virtual void | UpdateRigidBodies () override |
| Wraps super-class UpdateRigidBodies and adds a gid update. | |
| void | RemoveBodyExchange (int index) |
| Internal call for removing deactivating a body. More... | |
| ChDomainDistributed * | GetDomain () const |
| Returns the ChDomainDistributed object associated with the system. | |
| ChCommDistributed * | GetComm () const |
| Returns the ChCommDistributed object associated with the system. | |
| void | ErrorAbort (std::string msg) |
| Prints msg to the user and ends execution with an MPI abort. | |
| void | PrintBodyStatus () |
| Prints out all valid body data. Should only be used for debugging. | |
| void | PrintShapeData () |
| Prints out all valid shape data. Should only be used for debugging. | |
| void | PrintEfficiency () |
| Prints measures for computing efficiency. | |
| double | GetLowestZ (uint *gid) |
| Debugging function. | |
| double | GetHighestZ () |
| Returns the highest z coordinate in the system. | |
| void | CheckIds () |
| Checks for consistency in IDs in the system. More... | |
| int | RemoveBodiesBelow (double z) |
| Removes all bodies below the given height - initial implementation of a deactivating boundary condition. | |
| void | SanityCheck () |
| Checks structures added by chrono_distributed. More... | |
| void | SetBodyStates (const std::vector< uint > &gids, const std::vector< BodyState > &states) |
| Updates the states of all bodies listed in the gids parameter Must be called on all system ranks and inputs must be complete and valid on each rank. More... | |
| void | SetBodyState (uint gid, const BodyState &state) |
| void | SetSphereShapes (const std::vector< uint > &gids, const std::vector< int > &shape_idx, const std::vector< double > &radii) |
| Updates each sphere shape associated with bodies with global ids gids. More... | |
| void | SetSphereShape (uint gid, int shape_idx, double radius) |
| void | SetTriangleShapes (const std::vector< uint > &gids, const std::vector< int > &shape_idx, const std::vector< TriData > &new_shapes) |
| Updates triangle shapes associated with bodies identified by gids. More... | |
| void | SetTriangleShape (uint gid, int shape_idx, const TriData &new_shape) |
| std::vector< std::pair< uint, ChVector<> > > | GetBodyContactForces (const std::vector< uint > &gids) const |
| Get contact forces experienced by any of the bodies specified through their global IDs. More... | |
| virtual real3 | GetBodyContactForce (uint gid) const override |
| Get the contact force experienced by the body with given global ID. More... | |
 Public Member Functions inherited from chrono::ChSystemMulticoreSMC Public Member Functions inherited from chrono::ChSystemMulticoreSMC | |
| ChSystemMulticoreSMC (const ChSystemMulticoreSMC &other) | |
| virtual ChSystemMulticoreSMC * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| virtual ChContactMethod | GetContactMethod () const override |
| Return the contact method supported by this system. More... | |
| virtual void | AddMaterialSurfaceData (std::shared_ptr< ChBody > newbody) override |
| virtual void | UpdateMaterialSurfaceData (int index, ChBody *body) override |
| virtual void | Setup () override |
| Counts the number of bodies and links. More... | |
| virtual void | SetCollisionSystemType (ChCollisionSystemType type) override |
| Change the underlying collision detection system to the specified type. More... | |
| virtual void | SetContactContainer (ChCollisionSystemType type) override |
| Change the underlying contact container given the specified type of the collision detection system. More... | |
| virtual void | SetContactContainer (std::shared_ptr< ChContactContainer > container) override |
| Change the underlying contact container. More... | |
| virtual real3 | GetBodyContactTorque (uint body_id) const override |
| Get the contact torque on the body with specified id. More... | |
| virtual void | PrintStepStats () override |
| double | GetTimerProcessContact () const |
| virtual real3 | GetBodyContactForce (uint body_id) const=0 |
| Get the contact force on the body with specified id. More... | |
| real3 | GetBodyContactForce (std::shared_ptr< ChBody > body) const |
| Get the contact force on the specified body. More... | |
| virtual real3 | GetBodyContactTorque (uint body_id) const=0 |
| Get the contact torque on the body with specified id. More... | |
| real3 | GetBodyContactTorque (std::shared_ptr< ChBody > body) const |
| Get the contact torque on the specified body. More... | |
| Public Member Functions inherited from chrono::ChSystemMulticore | |
| ChSystemMulticore (const ChSystemMulticore &other) | |
| virtual void | AddShaft (std::shared_ptr< ChShaft > shaft) override |
| Attach a shaft to the underlying assembly. | |
| virtual void | AddLink (std::shared_ptr< ChLinkBase > link) override |
| Attach a link to the underlying assembly. | |
| virtual void | AddOtherPhysicsItem (std::shared_ptr< ChPhysicsItem > newitem) override |
| Attach a ChPhysicsItem object that is not a body, link, or mesh. | |
| void | ClearForceVariables () |
| virtual void | Update () |
| virtual void | UpdateBilaterals () |
| virtual void | UpdateLinks () |
| virtual void | UpdateOtherPhysics () |
| virtual void | UpdateShafts () |
| virtual void | UpdateMotorLinks () |
| virtual void | Update3DOFBodies () |
| void | RecomputeThreads () |
| virtual void | SetMaterialCompositionStrategy (std::unique_ptr< ChMaterialCompositionStrategy > &&strategy) override |
| Change the default composition laws for contact surface materials (coefficient of friction, cohesion, compliance, etc.). | |
| unsigned int | GetNumBodies () |
| unsigned int | GetNumShafts () |
| unsigned int | GetNumContacts () |
| unsigned int | GetNumBilaterals () |
| virtual double | GetTimerStep () const override |
| Return the time (in seconds) spent for computing the time step. | |
| virtual double | GetTimerAdvance () const override |
| Return the time (in seconds) for time integration, within the time step. | |
| virtual double | GetTimerLSsolve () const override |
| Return the time (in seconds) for the solver, within the time step. More... | |
| virtual double | GetTimerLSsetup () const override |
| Return the time (in seconds) for the solver Setup phase, within the time step. | |
| virtual double | GetTimerJacobian () const override |
| Return the time (in seconds) for calculating/loading Jacobian information, within the time step. | |
| virtual double | GetTimerCollision () const override |
| Return the time (in seconds) for runnning the collision detection step, within the time step. | |
| virtual double | GetTimerSetup () const override |
| Return the time (in seconds) for system setup, within the time step. | |
| virtual double | GetTimerUpdate () const override |
| Return the time (in seconds) for updating auxiliary data, within the time step. | |
| void | CalculateBodyAABB () |
| Calculate current body AABBs. | |
| virtual void | CalculateContactForces () |
| Calculate cummulative contact forces for all bodies in the system. More... | |
| virtual ChVector | GetBodyAppliedForce (ChBody *body) override |
| Return the resultant applied force on the specified body. More... | |
| virtual ChVector | GetBodyAppliedTorque (ChBody *body) override |
| Return the resultant applied torque on the specified body. More... | |
| real3 | GetBodyContactForce (std::shared_ptr< ChBody > body) const |
| Get the contact force on the specified body. More... | |
| real3 | GetBodyContactTorque (std::shared_ptr< ChBody > body) const |
| Get the contact torque on the specified body. More... | |
| settings_container * | GetSettings () |
| virtual void | SetNumThreads (int num_threads_chrono, int num_threads_collision=0, int num_threads_eigen=0) override |
| Set the number of OpenMP threads used by Chrono itself, Eigen, and the collision detection system. More... | |
| void | EnableThreadTuning (int min_threads, int max_threads) |
| Enable dynamic adjustment of number of threads between the specified limits. More... | |
| double | CalculateConstraintViolation (std::vector< double > &cvec) |
| Calculate the (linearized) bilateral constraint violations. More... | |
| Public Member Functions inherited from chrono::ChSystem | |
| ChSystem () | |
| Create a physical system. | |
| ChSystem (const ChSystem &other) | |
| Copy constructor. | |
| virtual | ~ChSystem () |
| Destructor. | |
| void | SetStep (double m_step) |
| Sets the time step used for integration (dynamical simulation). More... | |
| double | GetStep () const |
| Gets the current time step used for the integration (dynamical simulation). | |
| void | SetTimestepperType (ChTimestepper::Type type) |
| Set the method for time integration (time stepper type). More... | |
| ChTimestepper::Type | GetTimestepperType () const |
| Get the current method for time integration (time stepper type). | |
| void | SetTimestepper (std::shared_ptr< ChTimestepper > mstepper) |
| Set the timestepper object to be used for time integration. | |
| std::shared_ptr< ChTimestepper > | GetTimestepper () const |
| Get the timestepper currently used for time integration. | |
| void | SetMaxiter (int m_maxiter) |
| Sets outer iteration limit for assembly constraints. More... | |
| int | GetMaxiter () const |
| Gets iteration limit for assembly constraints. | |
| const ChMaterialCompositionStrategy & | GetMaterialCompositionStrategy () const |
| Accessor for the current composition laws for contact surface material. | |
| void | SetMinBounceSpeed (double mval) |
| For elastic collisions, with objects that have nonzero restitution coefficient: objects will rebounce only if their relative colliding speed is above this threshold. More... | |
| double | GetMinBounceSpeed () const |
| Objects will rebounce only if their relative colliding speed is above this threshold. | |
| void | SetMaxPenetrationRecoverySpeed (double mval) |
| For the default stepper, you can limit the speed of exiting from penetration situations. More... | |
| double | GetMaxPenetrationRecoverySpeed () const |
| Get the limit on the speed for exiting from penetration situations (for Anitescu stepper) | |
| virtual void | SetSolver (std::shared_ptr< ChSolver > newsolver) |
| Attach a solver (derived from ChSolver) for use by this system. | |
| virtual std::shared_ptr< ChSolver > | GetSolver () |
| Access the solver currently associated with this system. | |
| void | SetSolverType (ChSolver::Type type) |
| Choose the solver type, to be used for the simultaneous solution of the constraints in dynamical simulations (as well as in kinematics, statics, etc.) More... | |
| ChSolver::Type | GetSolverType () const |
| Gets the current solver type. | |
| void | SetSolverMaxIterations (int max_iters) |
| Set the maximum number of iterations, if using an iterative solver. More... | |
| int | GetSolverMaxIterations () const |
| Get the current maximum number of iterations, if using an iterative solver. More... | |
| void | SetSolverTolerance (double tolerance) |
| Set the solver tolerance threshold (used with iterative solvers only). More... | |
| double | GetSolverTolerance () const |
| Get the current tolerance value (used with iterative solvers only). | |
| void | SetSolverForceTolerance (double tolerance) |
| Set a solver tolerance threshold at force level (default: not specified). More... | |
| double | GetSolverForceTolerance () const |
| Get the current value of the force-level tolerance (used with iterative solvers only). | |
| void | SetSystemDescriptor (std::shared_ptr< ChSystemDescriptor > newdescriptor) |
| Instead of using the default 'system descriptor', you can create your own custom descriptor (inherited from ChSystemDescriptor) and plug it into the system using this function. | |
| std::shared_ptr< ChSystemDescriptor > | GetSystemDescriptor () |
| Access directly the 'system descriptor'. | |
| void | Set_G_acc (const ChVector<> &m_acc) |
| Set the G (gravity) acceleration vector, affecting all the bodies in the system. | |
| const ChVector & | Get_G_acc () const |
| Get the G (gravity) acceleration vector affecting all the bodies in the system. | |
| double | GetChTime () const |
| Get the simulation time of this system. | |
| void | SetChTime (double time) |
| Set (overwrite) the simulation time of this system. | |
| int | RemoveRedundantConstraints (bool remove_zero_constr=false, double qr_tol=1e-6, bool verbose=false) |
| Remove redundant constraints present in ChSystem through QR decomposition of constraints Jacobian matrix. More... | |
| int | GetNumThreadsChrono () const |
| int | GetNumthreadsCollision () const |
| int | GetNumthreadsEigen () const |
| const ChAssembly & | GetAssembly () const |
| Get the underlying assembly containing all physics items. | |
| virtual void | AddMesh (std::shared_ptr< fea::ChMesh > mesh) |
| Attach a mesh to the underlying assembly. | |
| void | Add (std::shared_ptr< ChPhysicsItem > item) |
| Attach an arbitrary ChPhysicsItem (e.g. More... | |
| void | AddBatch (std::shared_ptr< ChPhysicsItem > item) |
| Items added in this way are added like in the Add() method, but not instantly, they are simply queued in a batch of 'to add' items, that are added automatically at the first Setup() call. More... | |
| void | FlushBatch () |
| If some items are queued for addition in the assembly, using AddBatch(), this will effectively add them and clean the batch. More... | |
| virtual void | RemoveShaft (std::shared_ptr< ChShaft > shaft) |
| Remove a shaft from this assembly. | |
| virtual void | RemoveLink (std::shared_ptr< ChLinkBase > link) |
| Remove a link from this assembly. | |
| virtual void | RemoveMesh (std::shared_ptr< fea::ChMesh > mesh) |
| Remove a mesh from the assembly. | |
| virtual void | RemoveOtherPhysicsItem (std::shared_ptr< ChPhysicsItem > item) |
| Remove a ChPhysicsItem object that is not a body or a link. | |
| void | Remove (std::shared_ptr< ChPhysicsItem > item) |
| Remove arbitrary ChPhysicsItem that was added to the underlying assembly. | |
| void | RemoveAllBodies () |
| Remove all bodies from the underlying assembly. | |
| void | RemoveAllShafts () |
| Remove all shafts from the underlying assembly. | |
| void | RemoveAllLinks () |
| Remove all links from the underlying assembly. | |
| void | RemoveAllMeshes () |
| Remove all meshes from the underlying assembly. | |
| void | RemoveAllOtherPhysicsItems () |
| Remove all physics items not in the body, link, or mesh lists. | |
| const std::vector< std::shared_ptr< ChBody > > & | Get_bodylist () const |
| Get the list of bodies. | |
| const std::vector< std::shared_ptr< ChShaft > > & | Get_shaftlist () const |
| Get the list of shafts. | |
| const std::vector< std::shared_ptr< ChLinkBase > > & | Get_linklist () const |
| Get the list of links. | |
| const std::vector< std::shared_ptr< fea::ChMesh > > & | Get_meshlist () const |
| Get the list of meshes. | |
| const std::vector< std::shared_ptr< ChPhysicsItem > > & | Get_otherphysicslist () const |
| Get the list of physics items that are not in the body or link lists. | |
| std::shared_ptr< ChBody > | SearchBody (const std::string &name) const |
| Search a body by its name. | |
| std::shared_ptr< ChBody > | SearchBodyID (int id) const |
| Search a body by its ID. | |
| std::shared_ptr< ChShaft > | SearchShaft (const std::string &name) const |
| Search a shaft by its name. | |
| std::shared_ptr< ChLinkBase > | SearchLink (const std::string &name) const |
| Search a link by its name. | |
| std::shared_ptr< fea::ChMesh > | SearchMesh (const std::string &name) const |
| Search a mesh by its name. | |
| std::shared_ptr< ChPhysicsItem > | SearchOtherPhysicsItem (const std::string &name) const |
| Search from other ChPhysics items (not bodies, links, or meshes) by name. | |
| std::shared_ptr< ChMarker > | SearchMarker (const std::string &name) const |
| Search a marker by its name. | |
| std::shared_ptr< ChMarker > | SearchMarker (int id) const |
| Search a marker by its unique ID. | |
| std::shared_ptr< ChPhysicsItem > | Search (const std::string &name) const |
| Search an item (body, link or other ChPhysics items) by name. | |
| int | GetNbodies () const |
| Get the number of active bodies (excluding those that are sleeping or are fixed to ground). | |
| int | GetNbodiesSleeping () const |
| Get the number of bodies that are in sleeping mode (excluding fixed bodies). | |
| int | GetNbodiesFixed () const |
| Get the number of bodies that are fixed to ground. | |
| int | GetNbodiesTotal () const |
| Get the total number of bodies in the assembly, including the grounded and sleeping bodies. | |
| int | GetNshafts () const |
| Get the number of shafts. | |
| int | GetNshaftsSleeping () const |
| Get the number of shafts that are in sleeping mode (excluding fixed shafts). | |
| int | GetNshaftsFixed () const |
| Get the number of shafts that are fixed to ground. | |
| int | GetNshaftsTotal () const |
| Get the total number of shafts added to the assembly, including the grounded and sleeping shafts. | |
| int | GetNlinks () const |
| Get the number of links. | |
| int | GetNmeshes () const |
| Get the number of meshes. | |
| int | GetNphysicsItems () const |
| Get the number of other physics items (other than bodies, links, or meshes). | |
| int | GetNcoords () const |
| Get the number of coordinates (considering 7 coords for rigid bodies because of the 4 dof of quaternions). | |
| int | GetNdof () const |
| Get the number of degrees of freedom of the assembly. | |
| int | GetNdoc () const |
| Get the number of scalar constraints added to the assembly, including constraints on quaternion norms. | |
| int | GetNsysvars () const |
| Get the number of system variables (coordinates plus the constraint multipliers, in case of quaternions). | |
| int | GetNcoords_w () const |
| Get the number of coordinates (considering 6 coords for rigid bodies, 3 transl.+3rot.) | |
| int | GetNdoc_w () const |
| Get the number of scalar constraints added to the assembly. | |
| int | GetNdoc_w_C () const |
| Get the number of scalar constraints added to the assembly (only bilaterals). | |
| int | GetNdoc_w_D () const |
| Get the number of scalar constraints added to the assembly (only unilaterals). | |
| int | GetNsysvars_w () const |
| Get the number of system variables (coordinates plus the constraint multipliers). | |
| int | GetDOF () const |
| Get the number of scalar coordinates (ex. dim of position vector) | |
| int | GetDOF_w () const |
| Get the number of scalar coordinates of variables derivatives (ex. dim of speed vector) | |
| int | GetDOC () const |
| Get the number of scalar constraints, if any, in this item. | |
| int | GetDOC_c () const |
| Get the number of scalar constraints, if any, in this item (only bilateral constr.) | |
| int | GetDOC_d () const |
| Get the number of scalar constraints, if any, in this item (only unilateral constr.) | |
| void | ShowHierarchy (ChStreamOutAscii &m_file, int level=0) const |
| Write the hierarchy of contained bodies, markers, etc. More... | |
| void | Clear () |
| Removes all bodies/marker/forces/links/contacts, also resets timers and events. | |
| int | GetNcontacts () |
| Gets the number of contacts. | |
| double | GetTimerCollisionBroad () const |
| Return the time (in seconds) for broadphase collision detection, within the time step. | |
| double | GetTimerCollisionNarrow () const |
| Return the time (in seconds) for narrowphase collision detection, within the time step. | |
| double | GetRTF () const |
| Get current estimated RTF (real time factor). | |
| void | SetRTF (double rtf) |
| Set (overwrite) the RTF value for this system (if calculated externally). | |
| void | ResetTimers () |
| Resets the timers. | |
| void | Update (double mytime, bool update_assets=true) |
| Updates all the auxiliary data and children of bodies, forces, links, given their current state. | |
| void | Update (bool update_assets=true) |
| Updates all the auxiliary data and children of bodies, forces, links, given their current state. | |
| void | ForceUpdate () |
| In normal usage, no system update is necessary at the beginning of a new dynamics step (since an update is performed at the end of a step). More... | |
| void | IntToDescriptor (const unsigned int off_v, const ChStateDelta &v, const ChVectorDynamic<> &R, const unsigned int off_L, const ChVectorDynamic<> &L, const ChVectorDynamic<> &Qc) |
| void | IntFromDescriptor (const unsigned int off_v, ChStateDelta &v, const unsigned int off_L, ChVectorDynamic<> &L) |
| void | InjectVariables (ChSystemDescriptor &mdescriptor) |
| void | InjectConstraints (ChSystemDescriptor &mdescriptor) |
| void | ConstraintsLoadJacobians () |
| void | InjectKRMmatrices (ChSystemDescriptor &mdescriptor) |
| void | KRMmatricesLoad (double Kfactor, double Rfactor, double Mfactor) |
| void | VariablesFbReset () |
| void | VariablesFbLoadForces (double factor=1) |
| void | VariablesQbLoadSpeed () |
| void | VariablesFbIncrementMq () |
| void | VariablesQbSetSpeed (double step=0) |
| void | VariablesQbIncrementPosition (double step) |
| void | ConstraintsBiReset () |
| void | ConstraintsBiLoad_C (double factor=1, double recovery_clamp=0.1, bool do_clamp=false) |
| void | ConstraintsBiLoad_Ct (double factor=1) |
| void | ConstraintsBiLoad_Qc (double factor=1) |
| void | ConstraintsFbLoadForces (double factor=1) |
| void | ConstraintsFetch_react (double factor=1) |
| virtual int | GetNcoords_x () override |
| Tells the number of position coordinates x in y = {x, v}. | |
| virtual int | GetNcoords_v () override |
| Tells the number of speed coordinates of v in y = {x, v} and dy/dt={v, a}. | |
| virtual int | GetNconstr () override |
| Tells the number of lagrangian multipliers (constraints) | |
| virtual void | StateGather (ChState &x, ChStateDelta &v, double &T) override |
| From system to state y={x,v}. | |
| virtual void | StateScatter (const ChState &x, const ChStateDelta &v, const double T, bool full_update) override |
| From state Y={x,v} to system. This also triggers an update operation. | |
| virtual void | StateGatherAcceleration (ChStateDelta &a) override |
| From system to state derivative (acceleration), some timesteppers might need last computed accel. | |
| virtual void | StateScatterAcceleration (const ChStateDelta &a) override |
| From state derivative (acceleration) to system, sometimes might be needed. | |
| virtual void | StateGatherReactions (ChVectorDynamic<> &L) override |
| From system to reaction forces (last computed) - some timestepper might need this. | |
| virtual void | StateScatterReactions (const ChVectorDynamic<> &L) override |
| From reaction forces to system, ex. store last computed reactions in ChLink objects for plotting etc. | |
| virtual void | StateIncrementX (ChState &x_new, const ChState &x, const ChStateDelta &Dx) override |
| Perform x_new = x + dx, for x in Y = {x, dx/dt}. More... | |
| virtual bool | StateSolveCorrection (ChStateDelta &Dv, ChVectorDynamic<> &L, const ChVectorDynamic<> &R, const ChVectorDynamic<> &Qc, const double c_a, const double c_v, const double c_x, const ChState &x, const ChStateDelta &v, const double T, bool force_state_scatter, bool full_update, bool force_setup) override |
| Assuming a DAE of the form. More... | |
| virtual void | LoadResidual_F (ChVectorDynamic<> &R, const double c) override |
| Increment a vector R with the term c*F: R += c*F. More... | |
| virtual void | LoadResidual_Mv (ChVectorDynamic<> &R, const ChVectorDynamic<> &w, const double c) override |
| Increment a vector R with a term that has M multiplied a given vector w: R += c*M*w. More... | |
| virtual void | LoadResidual_CqL (ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) override |
| Increment a vectorR with the term Cq'*L: R += c*Cq'*L. More... | |
| virtual void | LoadConstraint_C (ChVectorDynamic<> &Qc, const double c, const bool do_clamp=false, const double clamp=1e30) override |
| Increment a vector Qc with the term C: Qc += c*C. More... | |
| virtual void | LoadConstraint_Ct (ChVectorDynamic<> &Qc, const double c) override |
| Increment a vector Qc with the term Ct = partial derivative dC/dt: Qc += c*Ct. More... | |
| virtual void | CustomEndOfStep () |
| Executes custom processing at the end of step. More... | |
| double | ComputeCollisions () |
| Perform the collision detection. More... | |
| void | RegisterCustomCollisionCallback (std::shared_ptr< CustomCollisionCallback > callback) |
| Specify a callback object to be invoked at each collision detection step. More... | |
| void | UnregisterCustomCollisionCallback (std::shared_ptr< CustomCollisionCallback > callback) |
| Remove the given collision callback from this system. | |
| virtual void | SetCollisionSystem (std::shared_ptr< ChCollisionSystem > coll_sys) |
| Change the underlying collision system. More... | |
| std::shared_ptr< ChCollisionSystem > | GetCollisionSystem () const |
| Access the underlying collision system. More... | |
| std::shared_ptr< ChContactContainer > | GetContactContainer () const |
| Access the underlying contact container. More... | |
| void | SetUseSleeping (bool ms) |
| Turn on this feature to let the system put to sleep the bodies whose motion has almost come to a rest. More... | |
| bool | GetUseSleeping () const |
| Tell if the system will put to sleep the bodies whose motion has almost come to a rest. | |
| int | DoStepDynamics (double step_size) |
| Advances the dynamical simulation for a single step, of length step_size. More... | |
| bool | DoFrameDynamics (double end_time) |
| Performs integration until the m_endtime is exactly reached, but current time step may be automatically "retouched" to meet exactly the m_endtime after n steps. More... | |
| bool | DoEntireDynamics (double end_time) |
| Given the current state, the sw simulates the dynamical behavior of the system, until the end time is reached, repeating many steps (maybe the step size will be automatically changed if the integrator method supports step size adaption). | |
| bool | DoEntireUniformDynamics (double end_time, double frame_step) |
| Like "DoEntireDynamics", but results are provided at uniform steps "frame_step", using the DoFrameDynamics() many times. | |
| size_t | GetStepcount () const |
| Return the total number of time steps taken so far. | |
| void | ResetStepcount () |
| Reset to 0 the total number of time steps. | |
| int | GetSolverCallsCount () const |
| Return the number of calls to the solver's Solve() function. More... | |
| int | GetSolverSetupCount () const |
| Return the number of calls to the solver's Setup() function. More... | |
| void | EnableSolverMatrixWrite (bool val, const std::string &out_dir=".") |
| Set this to "true" to enable automatic saving of solver matrices at each time step, for debugging purposes. More... | |
| bool | IsSolverMatrixWriteEnabled () const |
| void | DumpSystemMatrices (bool save_M, bool save_K, bool save_R, bool save_Cq, const char *path) |
| Dump the current M mass matrix, K damping matrix, R damping matrix, Cq constraint jacobian matrix (at the current configuration). More... | |
| void | GetMassMatrix (ChSparseMatrix *M) |
| Compute the system-level mass matrix. More... | |
| void | GetStiffnessMatrix (ChSparseMatrix *K) |
| Compute the system-level stiffness matrix, i.e. More... | |
| void | GetDampingMatrix (ChSparseMatrix *R) |
| Compute the system-level damping matrix, i.e. More... | |
| void | GetConstraintJacobianMatrix (ChSparseMatrix *Cq) |
| Compute the system-level constraint jacobian matrix, i.e. More... | |
| bool | DoStepKinematics (double step_size) |
| Advances the kinematic simulation for a single step of given length. | |
| bool | DoFrameKinematics (double end_time) |
| Performs kinematics until the end time is exactly reached. More... | |
| bool | DoEntireKinematics (double end_time) |
| Given the current state, this kinematic simulation satisfies all the constraints with the "DoStepKinematics" procedure for each time step, from the current time to the end time. | |
| bool | DoAssembly (int action) |
| Given the current time and state, attempt to satisfy all constraints, using a Newton-Raphson iteration loop. More... | |
| bool | DoFullAssembly () |
| Shortcut for full position/velocity/acceleration assembly. | |
| bool | DoStaticAnalysis (ChStaticAnalysis &analysis) |
| Perform a generic static analysis. More... | |
| bool | DoStaticLinear () |
| Solve the position of static equilibrium (and the reactions). More... | |
| bool | DoStaticNonlinear (int nsteps=10, bool verbose=false) |
| Solve the position of static equilibrium (and the reactions). More... | |
| bool | DoStaticNonlinearRheonomic (int nsteps=10, bool verbose=false, std::shared_ptr< ChStaticNonLinearRheonomicAnalysis::IterationCallback > callback=nullptr) |
| Solve the position of static equilibrium (and the reactions). More... | |
| bool | DoStaticRelaxing (int nsteps=10) |
| Finds the position of static equilibrium (and the reactions) starting from the current position. More... | |
| virtual void | ArchiveOut (ChArchiveOut &marchive) |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &marchive) |
| Method to allow deserialization of transient data from archives. | |
| int | FileProcessChR (ChStreamInBinary &m_file) |
| Process a ".chr" binary file containing the full system object hierarchy as exported -for example- by the R3D modeler, with chrono plug-in version, or by using the FileWriteChR() function. | |
| int | FileWriteChR (ChStreamOutBinary &m_file) |
| Write a ".chr" binary file containing the full system object hierarchy (bodies, forces, links, etc.) (deprecated function - obsolete) | |
| Public Member Functions inherited from chrono::ChIntegrableIIorder | |
| virtual int | GetNcoords_a () |
| Return the number of acceleration coordinates of a in dy/dt={v, a} This is a default implementation that works in almost all cases, as dim(a) = dim(v),. | |
| virtual void | StateSetup (ChState &x, ChStateDelta &v, ChStateDelta &a) |
| Set up the system state with separate II order components x, v, a for y = {x, v} and dy/dt={v, a}. | |
| virtual bool | StateSolveA (ChStateDelta &Dvdt, ChVectorDynamic<> &L, const ChState &x, const ChStateDelta &v, const double T, const double dt, bool force_state_scatter, bool full_update) |
| Solve for accelerations: a = f(x,v,t) Given current state y={x,v} , computes acceleration a in the state derivative dy/dt={v,a} and lagrangian multipliers L (if any). More... | |
| virtual int | GetNcoords_y () override |
| Return the number of coordinates in the state Y. More... | |
| virtual int | GetNcoords_dy () override |
| Return the number of coordinates in the state increment. More... | |
| virtual void | StateGather (ChState &y, double &T) override |
| Gather system state in specified array. More... | |
| virtual void | StateScatter (const ChState &y, const double T, bool full_update) override |
| Scatter the states from the provided array to the system. More... | |
| virtual void | StateGatherDerivative (ChStateDelta &Dydt) override |
| Gather from the system the state derivatives in specified array. More... | |
| virtual void | StateScatterDerivative (const ChStateDelta &Dydt) override |
| Scatter the state derivatives from the provided array to the system. More... | |
| virtual void | StateIncrement (ChState &y_new, const ChState &y, const ChStateDelta &Dy) override |
| Increment state array: y_new = y + Dy. More... | |
| virtual bool | StateSolve (ChStateDelta &dydt, ChVectorDynamic<> &L, const ChState &y, const double T, const double dt, bool force_state_scatter, bool full_update) override |
| Solve for state derivatives: dy/dt = f(y,t). More... | |
| virtual bool | StateSolveCorrection (ChStateDelta &Dy, ChVectorDynamic<> &L, const ChVectorDynamic<> &R, const ChVectorDynamic<> &Qc, const double a, const double b, const ChState &y, const double T, const double dt, bool force_state_scatter, bool full_update, bool force_setup) override final |
| Override of method for Ist order implicit integrators. More... | |
| Public Member Functions inherited from chrono::ChIntegrable | |
| virtual void | StateSetup (ChState &y, ChStateDelta &dy) |
| Set up the system state. | |
| virtual void | LoadResidual_Hv (ChVectorDynamic<> &R, const ChVectorDynamic<> &v, const double c) |
| Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with a term that has H multiplied a given vector w: R += c*H*w. More... | |
Public Attributes | |
| ChDistributedDataManager * | ddm |
| Central data storages for chrono_distributed. More... | |
| char | node_name [50] |
| Name of the node being run on. | |
| Public Attributes inherited from chrono::ChSystemMulticore | |
| ChMulticoreDataManager * | data_manager |
| int | current_threads |
Protected Member Functions | |
| void | AddBodyExchange (std::shared_ptr< ChBody > newbody, distributed::COMM_STATUS status) |
| Internal function for adding a body from communication. More... | |
| Protected Member Functions inherited from chrono::ChSystem | |
| virtual void | DescriptorPrepareInject (ChSystemDescriptor &mdescriptor) |
| Pushes all ChConstraints and ChVariables contained in links, bodies, etc. into the system descriptor. | |
| void | SetupInitial () |
| Initial system setup before analysis. More... | |
Protected Attributes | |
| int | num_ranks |
| Number of MPI ranks. | |
| int | my_rank |
| MPI rank. | |
| int | master_rank |
| Master MPI rank. | |
| double | ghost_layer |
| Length into the neighboring sub-domain which is considered shared. | |
| unsigned int | num_bodies_global |
| Number of bodies in the whole global simulation. More... | |
| MPI_Comm | world |
| Communicator of MPI ranks for the simulation. | |
| ChDomainDistributed * | domain |
| Class for domain decomposition. | |
| ChCommDistributed * | comm |
| Class for MPI communication. | |
| MPI_Datatype | InternalForceType |
| Type for internally sending contact forces. | |
| Protected Attributes inherited from chrono::ChSystemMulticore | |
| double | old_timer |
| double | old_timer_cd |
| bool | detect_optimal_threads |
| int | detect_optimal_bins |
| std::vector< double > | timer_accumulator |
| std::vector< double > | cd_accumulator |
| uint | frame_threads |
| uint | frame_bins |
| uint | counter |
| std::vector< ChLink * >::iterator | it |
| Protected Attributes inherited from chrono::ChSystem | |
| ChAssembly | assembly |
| std::shared_ptr< ChContactContainer > | contact_container |
| the container of contacts | |
| ChVector | G_acc |
| gravitational acceleration | |
| bool | is_initialized |
| if false, an initial setup is required (i.e. a call to SetupInitial) | |
| bool | is_updated |
| if false, a new update is required (i.e. a call to Update) | |
| int | ncoords |
| number of scalar coordinates (including 4th dimension of quaternions) for all active bodies | |
| int | ndoc |
| number of scalar constraints (including constr. on quaternions) | |
| int | nsysvars |
| number of variables (coords+lagrangian mult.), i.e. = ncoords+ndoc for all active bodies | |
| int | ncoords_w |
| number of scalar coordinates when using 3 rot. dof. per body; for all active bodies | |
| int | ndoc_w |
| number of scalar constraints when using 3 rot. dof. per body; for all active bodies | |
| int | nsysvars_w |
| number of variables when using 3 rot. dof. per body; i.e. = ncoords_w+ndoc_w | |
| int | ndof |
| number of degrees of freedom, = ncoords-ndoc = ncoords_w-ndoc_w , | |
| int | ndoc_w_C |
| number of scalar constraints C, when using 3 rot. dof. per body (excluding unilaterals) | |
| int | ndoc_w_D |
| number of scalar constraints D, when using 3 rot. dof. per body (only unilaterals) | |
| double | ch_time |
| simulation time of the system | |
| double | step |
| time step | |
| double | tol_force |
| tolerance for forces (used to obtain a tolerance for impulses) | |
| int | maxiter |
| max iterations for nonlinear convergence in DoAssembly() | |
| bool | use_sleeping |
| if true, put to sleep objects that come to rest | |
| std::shared_ptr< ChSystemDescriptor > | descriptor |
| system descriptor | |
| std::shared_ptr< ChSolver > | solver |
| solver for DVI or DAE problem | |
| double | min_bounce_speed |
| minimum speed for rebounce after impacts. Lower speeds are clamped to 0 | |
| double | max_penetration_recovery_speed |
| limit for the speed of penetration recovery (positive, speed of exiting) | |
| size_t | stepcount |
| internal counter for steps | |
| int | setupcount |
| number of calls to the solver's Setup() | |
| int | solvecount |
| number of StateSolveCorrection (reset to 0 at each timestep of static analysis) | |
| bool | write_matrix |
| write current system matrix to file(s); for debugging | |
| std::string | output_dir |
| output directory for writing system matrices | |
| int | ncontacts |
| total number of contacts | |
| ChCollisionSystemType | collision_system_type |
| type of the collision engine | |
| std::shared_ptr< ChCollisionSystem > | collision_system |
| collision engine | |
| std::vector< std::shared_ptr< CustomCollisionCallback > > | collision_callbacks |
| user-defined collision callbacks | |
| std::unique_ptr< ChMaterialCompositionStrategy > | composition_strategy |
| ChVisualSystem * | visual_system |
| material composition strategy More... | |
| int | nthreads_chrono |
| int | nthreads_eigen |
| int | nthreads_collision |
| ChTimer | timer_step |
| timer for integration step | |
| ChTimer | timer_advance |
| timer for time integration | |
| ChTimer | timer_ls_solve |
| timer for solver (excluding setup phase) | |
| ChTimer | timer_ls_setup |
| timer for solver setup | |
| ChTimer | timer_jacobian |
| timer for computing/loading Jacobian information | |
| ChTimer | timer_collision |
| timer for collision detection | |
| ChTimer | timer_setup |
| timer for system setup | |
| ChTimer | timer_update |
| timer for system update | |
| double | m_RTF |
| real-time factor (simulation time / simulated time) | |
| std::shared_ptr< ChTimestepper > | timestepper |
| time-stepper object | |
| bool | last_err |
| indicates error over the last kinematic/dynamics/statics | |
| ChVectorDynamic | applied_forces |
| system-wide vector of applied forces (lazy evaluation) | |
| bool | applied_forces_current |
| indicates if system-wide vector of forces is up-to-date | |
Friends | |
| class | ChCommDistributed |
| class | ChDomainDistributed |
Member Function Documentation
◆ AddBody()
|
overridevirtual |
Add a body to the system.
This function should be called on all ranks. AddBody classifies the body and decides whether or not to keep it on each rank.
Reimplemented from chrono::ChSystemMulticore.
◆ AddBodyAllRanks()
| void ChSystemDistributed::AddBodyAllRanks | ( | std::shared_ptr< ChBody > | body | ) |
Add a body to the system on all ranks, regardless of its location.
This body should not have associated collision geometry. NOTE: A body crossing multiple sub-domains will not be correctly advanced.
◆ AddBodyExchange()
|
protected |
Internal function for adding a body from communication.
Should not be called by the user.
◆ CheckIds()
| void ChSystemDistributed::CheckIds | ( | ) |
Checks for consistency in IDs in the system.
Should only be used for debugging.
◆ GetBodyContactForce()
|
overridevirtual |
Get the contact force experienced by the body with given global ID.
Must be called on all system ranks; return value valid only on 'master' rank.
Reimplemented from chrono::ChSystemMulticoreSMC.
◆ GetBodyContactForces()
| std::vector< std::pair< uint, ChVector<> > > ChSystemDistributed::GetBodyContactForces | ( | const std::vector< uint > & | gids | ) | const |
Get contact forces experienced by any of the bodies specified through their global IDs.
Must be called on all system ranks; return value valid only on 'master' rank. Returns a vector of pairs of global IDs and corresponding contact forces.
◆ GetMasterRank()
|
inline |
Return the rank (in the system's intra-communicator) of the process marked as 'master'.
Certain functions return information only on this process.
◆ NewBody()
|
overridevirtual |
Create a new body, consistent with the contact method and collision model used by this system.
The returned body is not added to the system.
Reimplemented from chrono::ChSystemMulticore.
◆ NewBodyAuxRef()
|
overridevirtual |
Create a new body with non-centroidal reference frame, consistent with the contact method and collision model used by this system.
The returned body is not added to the system.
Reimplemented from chrono::ChSystemMulticore.
◆ RemoveBody()
|
overridevirtual |
Remove a body from the simulation based on the ID of the body (not based on object comparison between ChBodys).
Should be called on all ranks to ensure that the correct body is found and removed where it exists.
Reimplemented from chrono::ChSystem.
◆ RemoveBodyExchange()
| void ChSystemDistributed::RemoveBodyExchange | ( | int | index | ) |
Internal call for removing deactivating a body.
Should not be called by the user.
◆ SanityCheck()
| void ChSystemDistributed::SanityCheck | ( | ) |
Checks structures added by chrono_distributed.
Prints ERROR messages at inconsistencies.
◆ SetBodyStates()
| void ChSystemDistributed::SetBodyStates | ( | const std::vector< uint > & | gids, |
| const std::vector< BodyState > & | states | ||
| ) |
Updates the states of all bodies listed in the gids parameter Must be called on all system ranks and inputs must be complete and valid on each rank.
NOTE: The change in position should be small in comparison to the ghost layer of this system. NOTE: The new states will reach the data_manager at the beginning of the next time step.
◆ SetMaster()
|
inline |
Set the calling process as 'master' in the intra-communicator used by this system.
For efficiency, certain functions report information only on this single rank. This saves a potentially unnecessary scatter operation (if needed, such an operation should be performed in user code). By default this is rank 0 in the system's intra-communicator.
◆ SetSphereShapes()
| void ChSystemDistributed::SetSphereShapes | ( | const std::vector< uint > & | gids, |
| const std::vector< int > & | shape_idx, | ||
| const std::vector< double > & | radii | ||
| ) |
Updates each sphere shape associated with bodies with global ids gids.
shape_idx identifies the index of the shape within its body's collisionsystem model. Must be called on all system ranks and inputs must be complete and valid on each rank.
◆ SetTriangleShapes()
| void ChSystemDistributed::SetTriangleShapes | ( | const std::vector< uint > & | gids, |
| const std::vector< int > & | shape_idx, | ||
| const std::vector< TriData > & | new_shapes | ||
| ) |
Updates triangle shapes associated with bodies identified by gids.
shape_idx identifies the index of the shape within its body's collisionsystem model. Must be called on all system ranks and inputs must be complete and valid on each rank.
Member Data Documentation
◆ ddm
| ChDistributedDataManager* chrono::ChSystemDistributed::ddm |
Central data storages for chrono_distributed.
Adds scaffolding data around ChDataManager used by Chrono::Multicore in order to maintain a consistent and correct view of all valid data.
◆ num_bodies_global
|
protected |
Number of bodies in the whole global simulation.
Important for maintaining unique global IDs
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_distributed/physics/ChSystemDistributed.h
- /builds/uwsbel/chrono/src/chrono_distributed/physics/ChSystemDistributed.cpp
