Description
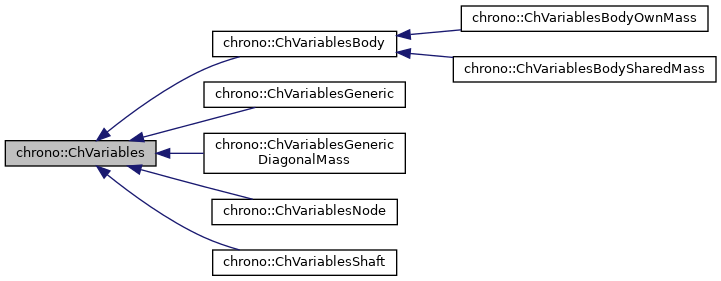
Base class for representing objects that introduce 'variables' and their associated mass submatrices.
Used for a sparse, distributed representation of the problem. See ChSystemDescriptor for more information about the overall problem and data representation.
Each ChVariables object must be able to define a mass submatrix, that will be assembled directly inside the global matrix Z (in particular, inside the block H or M). Because of this there is no need for ChVariables and derived classes to actually store their mass submatrix in memory: they just need to be able to compute with it.
Furthermore, the system-level mass matrix is not always formed explicitly. If a matrix-free solver is used, each ChVariables (and derived) object can be asked not to assemble its mass submatrix, but instead to provide operation related to it, Ee.g. M*x, M\x, +=M*x, and so on. Each derived class must implement these methods. Because of this, the ChVariables class does not include any mass submatrix by default.
#include <ChVariables.h>
Public Member Functions | |
| ChVariables (unsigned int dof) | |
| ChVariables & | operator= (const ChVariables &other) |
| Assignment operator: copy from other object. | |
| void | SetDisabled (bool mdis) |
| Deactivates/freezes the variable (these variables won't be modified by the system solver). | |
| bool | IsDisabled () const |
| Check if the variables have been deactivated (these variables won't be modified by the system solver). | |
| bool | IsActive () const |
| Check if these variables are currently active. More... | |
| unsigned int | GetDOF () const |
| The number of scalar variables in the vector qb (dof=degrees of freedom). | |
| ChVectorRef | State () |
| Get a reference to the differential states encapsulated by these variables. More... | |
| ChVectorRef | Force () |
| Get a reference to the generalized force corresponding to these variables. More... | |
| virtual void | ComputeMassInverseTimesVector (ChVectorRef result, ChVectorConstRef vect) const =0 |
| Compute the product of the inverse mass matrix by a given vector and store in result. More... | |
| virtual void | AddMassTimesVector (ChVectorRef result, ChVectorConstRef vect) const =0 |
| Compute the product of the mass matrix by a given vector and increment result. More... | |
| virtual void | AddMassTimesVectorInto (ChVectorRef result, ChVectorConstRef vect, const double ca) const =0 |
| Add the product of the mass submatrix by a given vector, scaled by ca, to result. More... | |
| virtual void | AddMassDiagonalInto (ChVectorRef result, const double ca) const =0 |
| Add the diagonal of the mass matrix, as a vector scaled by ca, to result. More... | |
| virtual void | PasteMassInto (ChSparseMatrix &mat, unsigned int start_row, unsigned int start_col, const double ca) const =0 |
| Write the mass submatrix for these variables into the specified global matrix at the offsets of each variable. More... | |
| void | SetOffset (unsigned int moff) |
| Set offset in the global state vector. More... | |
| unsigned int | GetOffset () const |
| Get offset in the global state vector. | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) |
Protected Attributes | |
| unsigned int | offset |
| offset in global q state vector (needed by some solvers) | |
| unsigned int | ndof |
| number of degrees of freedom (number of contained scalar variables) | |
Member Function Documentation
◆ AddMassDiagonalInto()
|
pure virtual |
Add the diagonal of the mass matrix, as a vector scaled by ca, to result.
Note: 'result' is a system-level vector of appropriate size. This function must index into this vector using the offsets of each variable.
Implemented in chrono::ChVariablesBodySharedMass, chrono::ChVariablesBodyOwnMass, chrono::ChVariablesShaft, chrono::ChVariablesGeneric, chrono::ChVariablesNode, and chrono::ChVariablesGenericDiagonalMass.
◆ AddMassTimesVector()
|
pure virtual |
Compute the product of the mass matrix by a given vector and increment result.
This function must perform the operation result += M * vect for a vector of same size as the variables state.
Implemented in chrono::ChVariablesBodySharedMass, chrono::ChVariablesBodyOwnMass, chrono::ChVariablesShaft, chrono::ChVariablesGeneric, chrono::ChVariablesNode, and chrono::ChVariablesGenericDiagonalMass.
◆ AddMassTimesVectorInto()
|
pure virtual |
Add the product of the mass submatrix by a given vector, scaled by ca, to result.
Note: 'result' and 'vect' are system-level vectors of appropriate size. This function must index into these vectors using the offsets of each variable.
Implemented in chrono::ChVariablesBodySharedMass, chrono::ChVariablesBodyOwnMass, chrono::ChVariablesShaft, chrono::ChVariablesGeneric, chrono::ChVariablesNode, and chrono::ChVariablesGenericDiagonalMass.
◆ ComputeMassInverseTimesVector()
|
pure virtual |
Compute the product of the inverse mass matrix by a given vector and store in result.
This function must calculate result = M^(-1) * vect for a vector of same size as the variables state.
Implemented in chrono::ChVariablesBodySharedMass, chrono::ChVariablesBodyOwnMass, chrono::ChVariablesShaft, chrono::ChVariablesGeneric, chrono::ChVariablesNode, and chrono::ChVariablesGenericDiagonalMass.
◆ Force()
|
inline |
Get a reference to the generalized force corresponding to these variables.
These variable forces are part of 'f' in the system:
| M -Cq'| * |q|- | f| = |0| , c>0, l>0, l*r=0; | Cq 0 | |l| |-b| |c|
◆ IsActive()
|
inline |
Check if these variables are currently active.
In general, tells if they must be included into the system solver or not.
◆ PasteMassInto()
|
pure virtual |
Write the mass submatrix for these variables into the specified global matrix at the offsets of each variable.
The masses will be scaled by the given factor 'ca'. The (start_row, start_col) pair specifies the top-left corner of the system-level mass matrix in the provided matrix. Assembling the system-level sparse matrix is required only if using a direct sparse solver or for debugging/reporting purposes.
Implemented in chrono::ChVariablesBodySharedMass, chrono::ChVariablesBodyOwnMass, chrono::ChVariablesShaft, chrono::ChVariablesGeneric, chrono::ChVariablesNode, and chrono::ChVariablesGenericDiagonalMass.
◆ SetOffset()
|
inline |
Set offset in the global state vector.
This offset if set automatically by the ChSystemDescriptor during set up.
◆ State()
|
inline |
Get a reference to the differential states encapsulated by these variables.
These variable states are part of 'q' in the system:
| M -Cq'| * |q|- | f| = |0| , c>0, l>0, l*r=0; | Cq 0 | |l| |-b| |c|
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/solver/ChVariables.h
- /builds/uwsbel/chrono/src/chrono/solver/ChVariables.cpp
