chrono::ChConstraintRigidRigid Class Reference
Description
Unilateral (contact) constraints.
#include <ChConstraintRigidRigid.h>
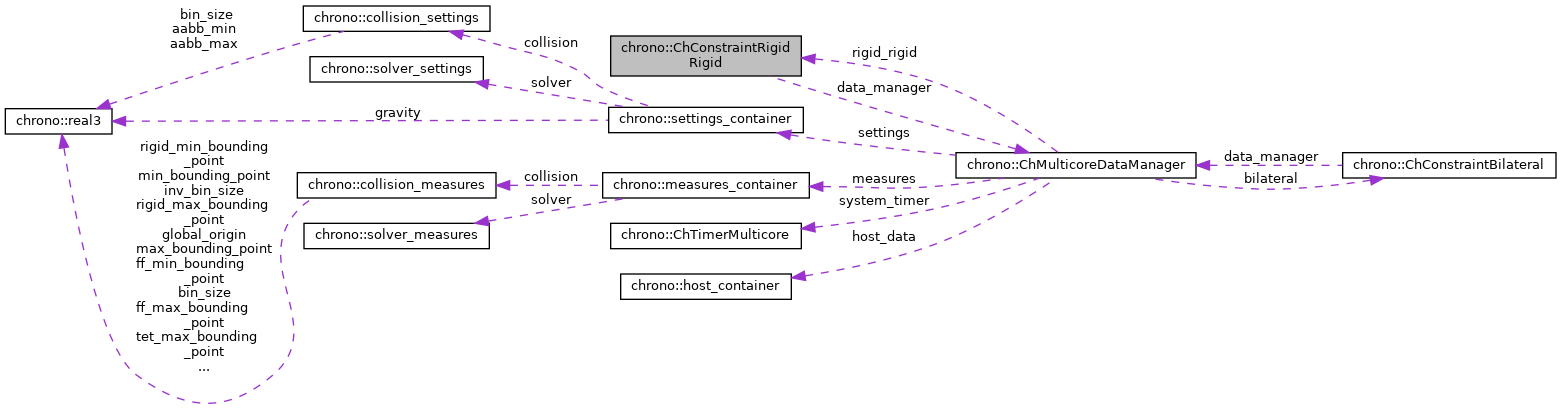
Collaboration diagram for chrono::ChConstraintRigidRigid:
Public Member Functions | |
| void | Setup (ChMulticoreDataManager *dm) |
| void | Project (real *gamma) |
| void | Project_Single (int index, real *gamma) |
| void | host_Project_single (int index, vec2 *ids, real3 *friction, real *cohesion, real *gamma) |
| void | func_Project_normal (int index, const vec2 *ids, const real *cohesion, real *gam) |
| void | func_Project_sliding (int index, const vec2 *ids, const real3 *fric, const real *cohesion, real *gam) |
| void | func_Project_spinning (int index, const vec2 *ids, const real3 *fric, real *gam) |
| void | Dx (const VectorType &x, VectorType &output) |
| void | D_Tx (const VectorType &x, VectorType &output) |
| void | Build_b () |
| Compute the vector of corrections. | |
| void | Build_E () |
| Compute the diagonal compliance matrix. | |
| void | Build_D () |
| Compute the jacobian matrix, no allocation is performed here, GenerateSparsity should take care of that. | |
| void | Build_s () |
| void | GenerateSparsity () |
| Fill-in the non zero entries in the bilateral jacobian with ones. More... | |
Public Attributes | |
| int | offset |
Protected Attributes | |
| custom_vector< bool2 > | contact_active_pairs |
| real | inv_h |
| reciprocal of time step, 1/h | |
| real | inv_hpa |
| 1 / (h+a) | |
| real | inv_hhpa |
| 1 / h*(h+a) | |
| custom_vector< real3_int > | rotated_point_a |
| custom_vector< real3_int > | rotated_point_b |
| custom_vector< quaternion > | quat_a |
| custom_vector< quaternion > | quat_b |
| ChMulticoreDataManager * | data_manager |
| Pointer to the system's data manager. | |
Member Function Documentation
◆ GenerateSparsity()
| void ChConstraintRigidRigid::GenerateSparsity | ( | ) |
Fill-in the non zero entries in the bilateral jacobian with ones.
This operation is sequential.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_multicore/constraints/ChConstraintRigidRigid.h
- /builds/uwsbel/chrono/src/chrono_multicore/constraints/ChConstraintRigidRigid.cpp
