chrono::vehicle::ChDriver Class Reference
Description
Base class for a vehicle driver system.
A driver system must be able to report the current values of the inputs (throttle, steering, braking). A concrete driver class must set the member variables m_throttle, m_steering, and m_braking.
#include <ChDriver.h>
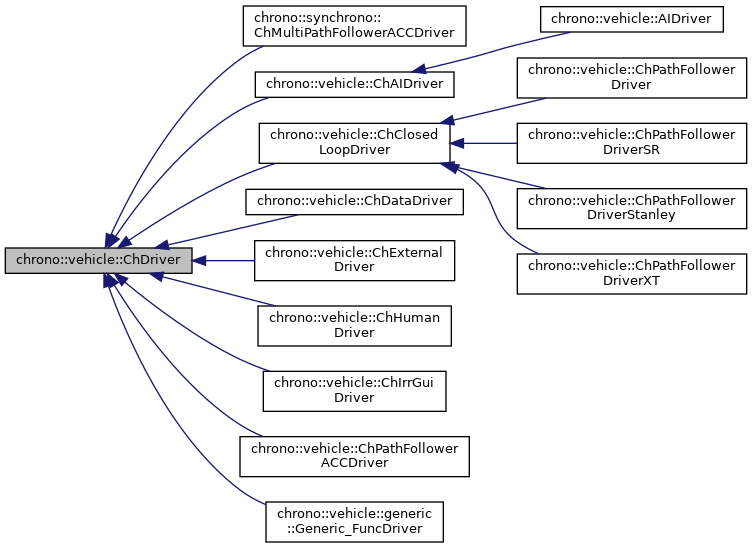
Inheritance diagram for chrono::vehicle::ChDriver:
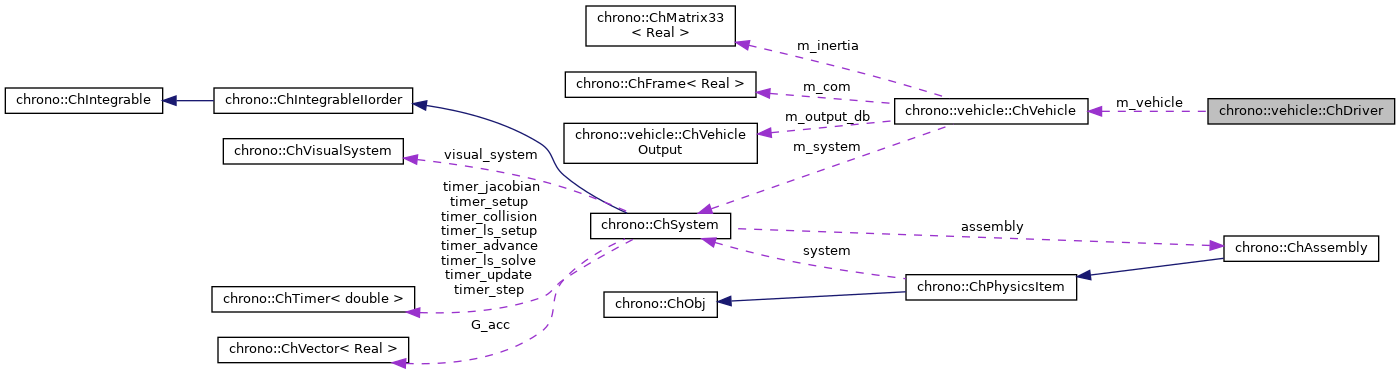
Collaboration diagram for chrono::vehicle::ChDriver:
Public Member Functions | |
| ChDriver (ChVehicle &vehicle) | |
| Construct a driver subsystem associated with the given vehicle. | |
| double | GetThrottle () const |
| Get the driver throttle input (in the range [0,1]) | |
| double | GetSteering () const |
| Get the driver steering input (in the range [-1,+1]) | |
| double | GetBraking () const |
| Get the driver braking input (in the range [0,1]) | |
| DriverInputs | GetInputs () const |
| Get all current inputs at once. | |
| virtual void | Initialize () |
| Initialize this driver system. | |
| virtual void | Synchronize (double time) |
| Update the state of this driver system at the current time. | |
| virtual void | Advance (double step) |
| Advance the state of this driver system by the specified time step. | |
| bool | LogInit (const std::string &filename) |
| Initialize output file for recording driver inputs. | |
| bool | Log (double time) |
| Record the current driver inputs to the log file. | |
| void | SetSteering (double val, double min_val=-1, double max_val=1) |
| Overwrite the value for the driver steering input. | |
| void | SetThrottle (double val, double min_val=0, double max_val=1) |
| Overwrite the value for the driver throttle input. | |
| void | SetBraking (double val, double min_val=0, double max_val=1) |
| Overwrite the value for the driver braking input. | |
Protected Attributes | |
| ChVehicle & | m_vehicle |
| reference to associated vehicle | |
| double | m_throttle |
| current value of throttle input | |
| double | m_steering |
| current value of steering input | |
| double | m_braking |
| current value of braking input | |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/ChDriver.h
- /builds/uwsbel/chrono/src/chrono_vehicle/ChDriver.cpp
