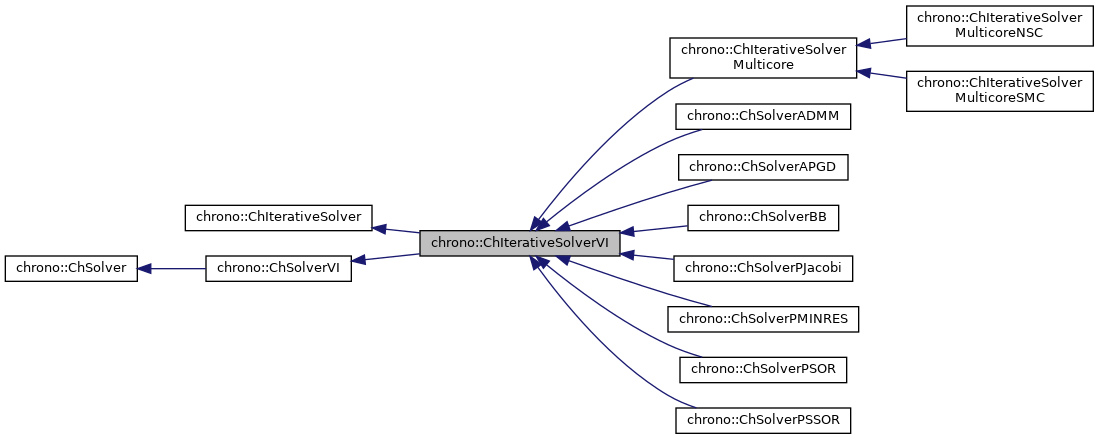
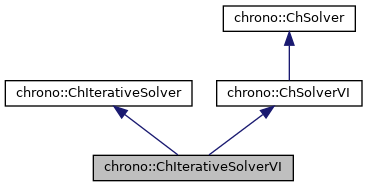
Description
Base class for iterative solvers aimed at solving complementarity problems arising from QP optimization problems.
The problem is described by a variational inequality VI(Z*x-d,K):
| M -Cq'|*|q|- | f|= |0| | Cq -E | |l| |-b| |c|
with l \(\in\) Y, C \(\in\) Ny, normal cone to Y
Also Z symmetric by flipping sign of l_i:
|M Cq'|*| q|-| f|=|0| |Cq E | |-l| |-b| |c|
- case linear problem: all Y_i = R, Ny=0, ex. all bilaterals
- case LCP: all Y_i = R+: c>=0, l>=0, l*c=0
- case CCP: Y_i are friction cones
The default maximum number of iterations is 50.
The 'tolerance' threshold value used in the stopping criteria may have different meaning for different solvers (threshold on maximum constraint violation, threshold on projected residual, etc). See the GetError method for an individual iterative VI solver for details.
Diagonal preconditioning is enabled by default, but may not supported by all iterative VI solvers.
#include <ChIterativeSolverVI.h>
Public Member Functions | |
| void | SetOmega (double mval) |
| Set the overrelaxation factor (default: 1.0). More... | |
| void | SetSharpnessLambda (double mval) |
| Set the sharpness factor (default: 1.0). More... | |
| virtual void | SetMaxIterations (int max_iterations) override |
| Set the maximum number of iterations. | |
| void | SetRecordViolation (bool mval) |
| Enable/disable recording of the constraint violation history. More... | |
| double | GetOmega () const |
| Return the current value of the overrelaxation factor. | |
| double | GetSharpnessLambda () const |
| Return the current value of the sharpness factor. | |
| virtual int | GetIterations () const override |
| Return the number of iterations performed during the last solve. | |
| const std::vector< double > & | GetViolationHistory () const |
| Access the vector of constraint violation history. More... | |
| const std::vector< double > & | GetDeltalambdaHistory () const |
| Access the vector with history of maximum change in Lagrange multipliers Note that collection of constraint violations must be enabled through SetRecordViolation. | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow de-serialization of transient data from archives. | |
 Public Member Functions inherited from chrono::ChIterativeSolver Public Member Functions inherited from chrono::ChIterativeSolver | |
| void | SetTolerance (double tolerance) |
| Set the tolerance threshold used by the stopping criteria. | |
| void | EnableDiagonalPreconditioner (bool val) |
| Enable/disable use of a simple diagonal preconditioner (default: true). More... | |
| void | EnableWarmStart (bool val) |
| Enable/disable warm starting by providing an initial guess (default: false). More... | |
| int | GetMaxIterations () const |
| Get the current maximum number of iterations. | |
| double | GetTolerance () const |
| Get the current tolerance value. | |
| virtual double | GetError () const =0 |
| Return the tolerance error reached during the last solve. | |
| Public Member Functions inherited from chrono::ChSolver | |
| virtual Type | GetType () const |
| Return type of the solver. | |
| virtual ChDirectSolverLS * | AsDirect () |
| Downcast to ChDirectSolver. | |
| virtual bool | Setup (ChSystemDescriptor &sysd, bool analyze) |
| Perform setup operations for the solver. More... | |
| virtual double | Solve (ChSystemDescriptor &sysd)=0 |
| Solve the linear system. More... | |
| void | SetConditioningFactor (double factor) |
| Set the matrix conditioning factor (default: 1). More... | |
| void | SetVerbose (bool mv) |
| Set verbose output from solver. | |
| void | EnableWrite (bool val, const std::string &frame, const std::string &out_dir=".") |
| Enable/disable debug output of matrix, RHS, and solution vector. | |
| std::string | GetTypeAsString () const |
| Return this solver's type as a string. | |
Protected Member Functions | |
| virtual bool | IsIterative () const override |
| Return true if iterative solver. | |
| virtual bool | IsDirect () const override |
| Return true if direct solver. | |
| virtual ChIterativeSolver * | AsIterative () override |
| Downcast to ChIterativeSolver. | |
| void | AtIterationEnd (double mmaxviolation, double mdeltalambda, unsigned int iternum) |
| This method MUST be called by all iterative methods INSIDE their iteration loops (at the end). More... | |
| virtual bool | SolveRequiresMatrix () const override |
| Indicate whether or not the Solve() phase requires an up-to-date problem matrix. More... | |
| Protected Member Functions inherited from chrono::ChIterativeSolver | |
| ChIterativeSolver (int max_iterations, double tolerance, bool use_precond, bool warm_start) | |
| void | WriteMatrices (ChSystemDescriptor &sysd, bool one_indexed=true) |
| double | CheckSolution (ChSystemDescriptor &sysd, const ChVectorDynamic<> &x) |
Protected Attributes | |
| int | m_iterations |
| number of iterations performed by the solver during last call to Solve() | |
| double | m_omega |
| over-relaxation factor | |
| double | m_shlambda |
| sharpness factor | |
| bool | record_violation_history |
| std::vector< double > | violation_history |
| std::vector< double > | dlambda_history |
| Protected Attributes inherited from chrono::ChIterativeSolver | |
| bool | m_use_precond |
| use diagonal preconditioning? | |
| bool | m_warm_start |
| use initial guess? | |
| int | m_max_iterations |
| maximum number of iterations | |
| double | m_tolerance |
| tolerance threshold in stopping criteria | |
| Protected Attributes inherited from chrono::ChSolver | |
| double | conditioning_factor |
| bool | verbose |
| bool | write_matrix |
| std::string | output_dir |
| std::string | frame_id |
Additional Inherited Members | |
| Public Types inherited from chrono::ChSolver | |
| enum | Type { Type::PSOR, Type::PSSOR, Type::PJACOBI, Type::PMINRES, Type::BARZILAIBORWEIN, Type::APGD, Type::ADMM, Type::SPARSE_LU, Type::SPARSE_QR, Type::PARDISO_MKL, Type::MUMPS, Type::GMRES, Type::MINRES, Type::BICGSTAB, CUSTOM } |
| Available types of solvers. More... | |
| Static Public Member Functions inherited from chrono::ChSolver | |
| static std::string | GetTypeAsString (Type type) |
| Return the provided solver type as a string. | |
Member Function Documentation
◆ AtIterationEnd()
|
protected |
This method MUST be called by all iterative methods INSIDE their iteration loops (at the end).
If history recording is enabled, this function will store the current values as passed as arguments. Note: 'iternum' starts at 0 for the first iteration.
◆ GetViolationHistory()
|
inline |
Access the vector of constraint violation history.
Note that collection of constraint violations must be enabled through SetRecordViolation.
◆ SetOmega()
| void chrono::ChIterativeSolverVI::SetOmega | ( | double | mval | ) |
Set the overrelaxation factor (default: 1.0).
This factor may be used by PSOR-like methods. A good value for Jacobi solver is 0.2; for other iterative solvers it can be up to 1.0
◆ SetRecordViolation()
| void chrono::ChIterativeSolverVI::SetRecordViolation | ( | bool | mval | ) |
Enable/disable recording of the constraint violation history.
If enabled, the maximum constraint violation at the end of each iteration is stored in a vector (see GetViolationHistory).
◆ SetSharpnessLambda()
| void chrono::ChIterativeSolverVI::SetSharpnessLambda | ( | double | mval | ) |
Set the sharpness factor (default: 1.0).
This factor may be used by PSOR-like methods with projection (see Mangasarian LCP method). A good sharpness value is in the 0.8 ... 1.0 range (lower values improve accuracy but at the cost of slower convergence)
◆ SolveRequiresMatrix()
|
inlineoverrideprotectedvirtual |
Indicate whether or not the Solve() phase requires an up-to-date problem matrix.
Typically, this is the case for iterative solvers (as the matrix is needed for the matrix-vector operations).
Implements chrono::ChSolver.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/solver/ChIterativeSolverVI.h
- /builds/uwsbel/chrono/src/chrono/solver/ChIterativeSolverVI.cpp
