Markers
Markers, which are implemented in Chrono in the ChMarker class, are auxiliary frames that can be attached to rigid bodies.
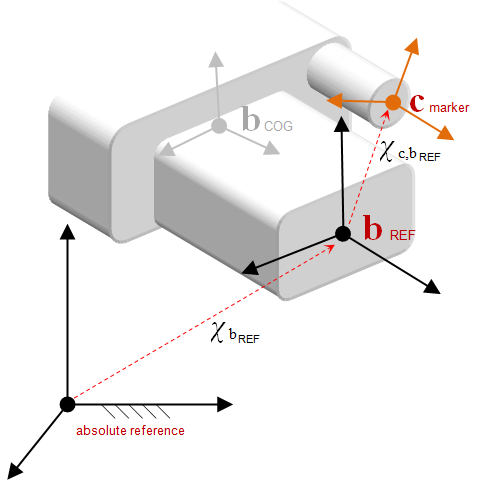
- Markers are coordinate systems that inherit from ChFrameMoving because in the most general case one can also assign a motion to a marker with respect to the owner body
- Markers can be used to get the position/velocity/acceleration of a given reference frame attached to a rigid body
- They can be used to build mechanical constraints via ChLink objects by using a couple of ChMarker objects from two bodies
Example:
auto marker_c = chrono_types::make_shared<ChMarker>();
marker_c->Impose_Abs_Coord(X_ca); // or.. marker_c->Impose_Rel_Coord(X_cb);
body_b->AddMarker(marker_c);
