Public Member Functions |
Public Attributes |
Protected Member Functions |
Protected Attributes |
Friends |
List of all members
chrono::ChCollisionModelMulticore Class Reference
Description
Geometric model for the custom multicore Chrono collision system.
#include <ChCollisionModelMulticore.h>
Inherits chrono::ChCollisionModelImpl.
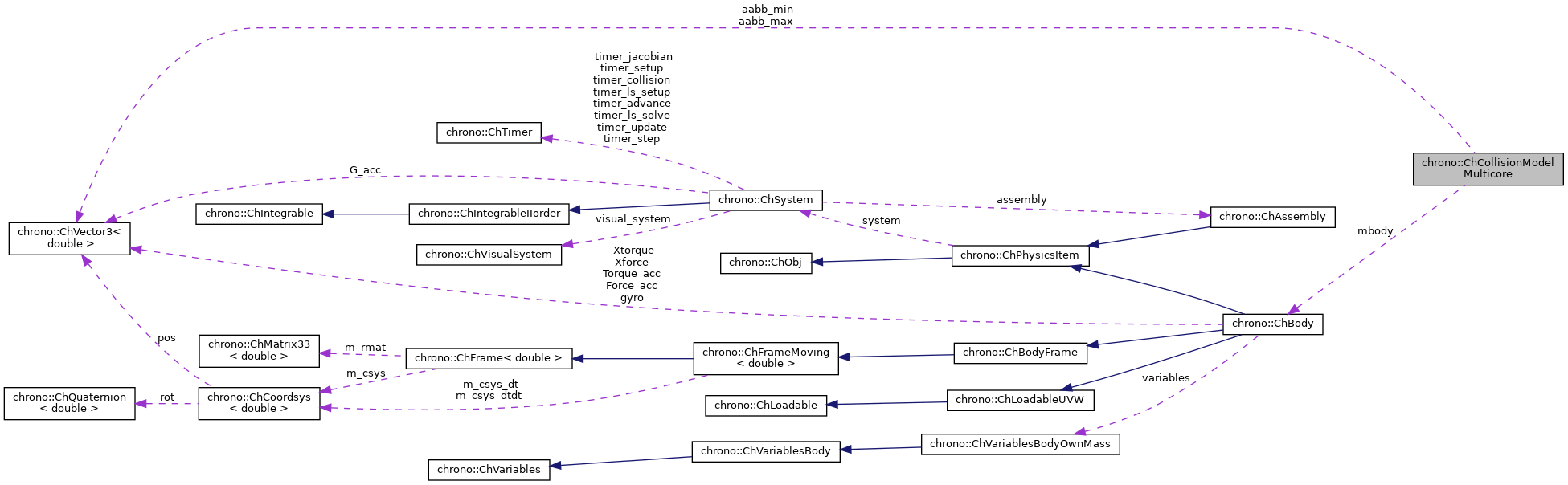
Collaboration diagram for chrono::ChCollisionModelMulticore:
Public Member Functions | |
| ChCollisionModelMulticore (ChCollisionModel *collision_model) | |
| virtual void | SyncPosition () override |
| Sets the position and orientation of the collision model as the rigid body current position. | |
| ChBody * | GetBody () const |
| Return a pointer to the associated body. | |
| void | SetBody (ChBody *body) |
| Set the pointer to the owner rigid body. | |
| virtual ChAABB | GetBoundingBox () const override |
| Return the axis aligned bounding box for this collision model. | |
Public Attributes | |
| std::vector< real3 > | local_convex_data |
| ChVector3d | aabb_min |
| ChVector3d | aabb_max |
Protected Member Functions | |
| void | Populate () |
| Populate the collision system with the collision shapes defined in this model. | |
| virtual void | OnFamilyChange (short int family_group, short int family_mask) override |
| Additional operations to be performed on a change in collision family. | |
Protected Attributes | |
| ChBody * | mbody |
| associated contactable (rigid body only) | |
| std::vector< std::shared_ptr< ctCollisionShape > > | m_ct_shapes |
| list of Chrono collision shapes in model | |
| std::vector< std::shared_ptr< ChCollisionShape > > | m_shapes |
| extended list of collision shapes | |
Friends | |
| class | ChCollisionSystemMulticore |
| class | ChCollisionSystemChronoMulticore |
| class | ChContactContainerMulticoreNSC |
| class | ChContactContainerMulticoreSMC |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/collision/multicore/ChCollisionModelMulticore.h
- /builds/uwsbel/chrono/src/chrono/collision/multicore/ChCollisionModelMulticore.cpp
