Description
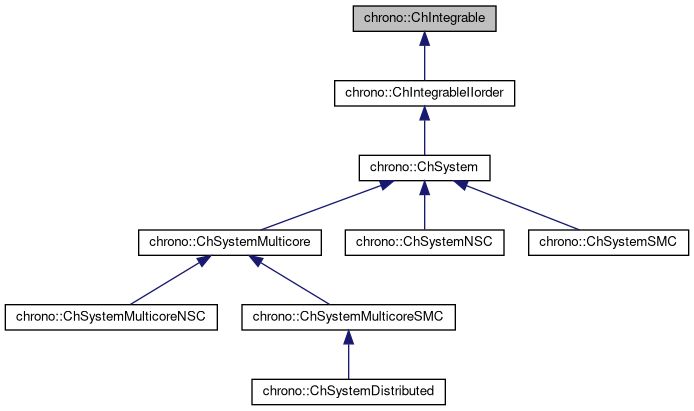
Interface class for all objects that support time integration.
Derived concrete classes can use time integrators for the ChTimestepper hierarchy.
#include <ChIntegrable.h>
Public Member Functions | |
| virtual int | GetNcoords_y ()=0 |
| Return the number of coordinates in the state Y. | |
| virtual int | GetNcoords_dy () |
| Return the number of coordinates in the state increment. More... | |
| virtual int | GetNconstr () |
| Return the number of lagrangian multipliers (constraints). More... | |
| virtual void | StateSetup (ChState &y, ChStateDelta &dy) |
| Set up the system state. | |
| virtual void | StateGather (ChState &y, double &T) |
| Gather system state in specified array. More... | |
| virtual void | StateScatter (const ChState &y, const double T, bool full_update) |
| Scatter the states from the provided array to the system. More... | |
| virtual void | StateGatherDerivative (ChStateDelta &Dydt) |
| Gather from the system the state derivatives in specified array. More... | |
| virtual void | StateScatterDerivative (const ChStateDelta &Dydt) |
| Scatter the state derivatives from the provided array to the system. More... | |
| virtual void | StateGatherReactions (ChVectorDynamic<> &L) |
| Gather from the system the Lagrange multipliers in specified array. More... | |
| virtual void | StateScatterReactions (const ChVectorDynamic<> &L) |
| Scatter the Lagrange multipliers from the provided array to the system. More... | |
| virtual bool | StateSolve (ChStateDelta &Dydt, ChVectorDynamic<> &L, const ChState &y, const double T, const double dt, bool force_state_scatter, bool full_update)=0 |
| Solve for state derivatives: dy/dt = f(y,t). More... | |
| virtual void | StateIncrement (ChState &y_new, const ChState &y, const ChStateDelta &Dy) |
| Increment state array: y_new = y + Dy. More... | |
| virtual bool | StateSolveCorrection (ChStateDelta &Dy, ChVectorDynamic<> &L, const ChVectorDynamic<> &R, const ChVectorDynamic<> &Qc, const double a, const double b, const ChState &y, const double T, const double dt, bool force_state_scatter, bool full_update, bool force_setup) |
| Assuming an explicit ODE. More... | |
| virtual void | LoadResidual_Hv (ChVectorDynamic<> &R, const ChVectorDynamic<> &v, const double c) |
| Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with a term that has H multiplied a given vector w: R += c*H*w. More... | |
| virtual void | LoadResidual_F (ChVectorDynamic<> &R, const double c) |
| Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with the term c*F: R += c*F. More... | |
| virtual void | LoadResidual_CqL (ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) |
| Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with the term Cq'*L: R += c*Cq'*L. More... | |
| virtual void | LoadConstraint_C (ChVectorDynamic<> &Qc, const double c, const bool do_clamp=false, const double mclam=1e30) |
| Increment a vector Qc (usually the residual in a Newton Raphson iteration for solving an implicit integration step, constraint part) with the term C: Qc += c*C. More... | |
| virtual void | LoadConstraint_Ct (ChVectorDynamic<> &Qc, const double c) |
| Increment a vector Qc (usually the residual in a Newton Raphson iteration for solving an implicit integration step, constraint part) with the term Ct = partial derivative dC/dt: Qc += c*Ct. More... | |
Member Function Documentation
◆ GetNconstr()
|
inlinevirtual |
Return the number of lagrangian multipliers (constraints).
By default returns 0.
Reimplemented in chrono::ChSystem.
◆ GetNcoords_dy()
|
inlinevirtual |
Return the number of coordinates in the state increment.
This is a base implementation that works in many cases where dim(Y) = dim(dy), but it can be overridden in the case that y contains quaternions for rotations rather than simple y+dy
Reimplemented in chrono::ChIntegrableIIorder.
◆ LoadConstraint_C()
|
inlinevirtual |
Increment a vector Qc (usually the residual in a Newton Raphson iteration for solving an implicit integration step, constraint part) with the term C: Qc += c*C.
- Parameters
-
Qc result: the Qc residual, Qc += c*C c a scaling factor do_clamp enable optional clamping of Qc mclam clamping value
Reimplemented in chrono::ChIntegrableIIorder, and chrono::ChSystem.
◆ LoadConstraint_Ct()
|
inlinevirtual |
Increment a vector Qc (usually the residual in a Newton Raphson iteration for solving an implicit integration step, constraint part) with the term Ct = partial derivative dC/dt: Qc += c*Ct.
- Parameters
-
Qc result: the Qc residual, Qc += c*Ct c a scaling factor
Reimplemented in chrono::ChSystem, and chrono::ChIntegrableIIorder.
◆ LoadResidual_CqL()
|
inlinevirtual |
Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with the term Cq'*L: R += c*Cq'*L.
- Parameters
-
R result: the R residual, R += c*Cq'*L L the L vector c a scaling factor
Reimplemented in chrono::ChSystem, and chrono::ChIntegrableIIorder.
◆ LoadResidual_F()
|
inlinevirtual |
Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with the term c*F: R += c*F.
- Parameters
-
R result: the R residual, R += c*F c a scaling factor
Reimplemented in chrono::ChSystem, and chrono::ChIntegrableIIorder.
◆ LoadResidual_Hv()
|
inlinevirtual |
Increment a vector R (usually the residual in a Newton Raphson iteration for solving an implicit integration step) with a term that has H multiplied a given vector w: R += c*H*w.
- Parameters
-
R result: the R residual, R += c*M*v v the v vector c a scaling factor
◆ StateGather()
|
inlinevirtual |
Gather system state in specified array.
Optionally, they will copy system private state, if any, to Y.
Reimplemented in chrono::ChIntegrableIIorder.
◆ StateGatherDerivative()
|
inlinevirtual |
Gather from the system the state derivatives in specified array.
Optional: the integrable object might contain last computed state derivative, some integrators might reuse it.
Reimplemented in chrono::ChIntegrableIIorder.
◆ StateGatherReactions()
|
inlinevirtual |
Gather from the system the Lagrange multipliers in specified array.
Optional: the integrable object might contain Lagrange multipliers (reaction in constraints)
Reimplemented in chrono::ChSystem.
◆ StateIncrement()
|
virtual |
Increment state array: y_new = y + Dy.
This is a base implementation that works in many cases, but it can be overridden in the case that y contains quaternions for rotations, in which case rot. exponential is needed instead of simply doing y+Dy. NOTE: the system is not updated automatically after the state increment, so one might need to call StateScatter().
- Parameters
-
y_new resulting y_new = y + Dy y initial state y Dy state increment Dy
Reimplemented in chrono::ChIntegrableIIorder.
◆ StateScatter()
|
inlinevirtual |
Scatter the states from the provided array to the system.
This function is called by time integrators every time they modify the Y state. In some cases, the ChIntegrable object might contain dependent data structures that might need an update at each change of Y. If so, this function must be overridden.
Reimplemented in chrono::ChIntegrableIIorder.
◆ StateScatterDerivative()
|
inlinevirtual |
Scatter the state derivatives from the provided array to the system.
Optional: the integrable object might need to store last computed state derivative, ex. for plotting etc.
Reimplemented in chrono::ChIntegrableIIorder.
◆ StateScatterReactions()
|
inlinevirtual |
Scatter the Lagrange multipliers from the provided array to the system.
Optional: the integrable object might contain Lagrange multipliers (reaction in constraints)
Reimplemented in chrono::ChSystem.
◆ StateSolve()
|
pure virtual |
Solve for state derivatives: dy/dt = f(y,t).
Given current state y , computes the state derivative dy/dt and Lagrange multipliers L (if any). NOTE: some solvers (ex in DVI) cannot compute a classical derivative dy/dt when v is a function of bounded variation, and f or L are distributions (e.g., when there are impulses and discontinuities), so they compute a finite Dy through a finite dt. This is the reason why this function has an optional parameter dt. In a DVI setting, one computes Dy, and returns Dy*(1/dt) here in Dydt parameter; if the original Dy has to be known, just multiply Dydt*dt. The same for impulses: a DVI would compute impulses I, and return L=I*(1/dt). NOTES:
- derived classes must take care of calling StateScatter(y,T) before computing Dy, only if force_state_scatter = true (otherwise it is assumed state is already in sync)
- derived classes must take care of resizing Dy and L if needed.
This function must return true if successful and false otherwise.
- Parameters
-
Dydt result: computed Dydt L result: computed lagrangian multipliers, if any y current state y T current time T dt timestep (if needed, ex. in DVI) force_state_scatter if false, y and T are not scattered to the system full_update if true, perform a full update during scatter
Implemented in chrono::ChIntegrableIIorder.
◆ StateSolveCorrection()
|
inlinevirtual |
Assuming an explicit ODE.
H*dy/dt = F(y,t)
or an explicit DAE
H*dy/dt = F(y,t) + Cq*L
C(y,t) = 0
this function must compute the state increment as required for a Newton iteration within an implicit integration scheme. For an ODE:
Dy = [ c_a*H + c_b*dF/dy ]^-1 * R Dy = [ G ]^-1 * R
For a DAE with constraints:
|Dy| = [ G Cq' ]^-1 * | R | |DL| [ Cq 0 ] | Qc|
where R is a given residual and dF/dy is the Jacobian of F.
This function must return true if successful and false otherwise.
- Parameters
-
Dy result: computed Dy L result: computed lagrangian multipliers, if any R the R residual Qc the Qc residual a the factor in c_a*H b the factor in c_b*dF/dy y current state y T current time T dt timestep (if needed) force_state_scatter if false, y is not scattered to the system full_update if true, perform a full update during scatter force_setup if true, call the solver's Setup() function
Reimplemented in chrono::ChIntegrableIIorder.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/timestepper/ChIntegrable.h
- /builds/uwsbel/chrono/src/chrono/timestepper/ChIntegrable.cpp
