chrono::ChMulticoreDataManager Class Reference
Description
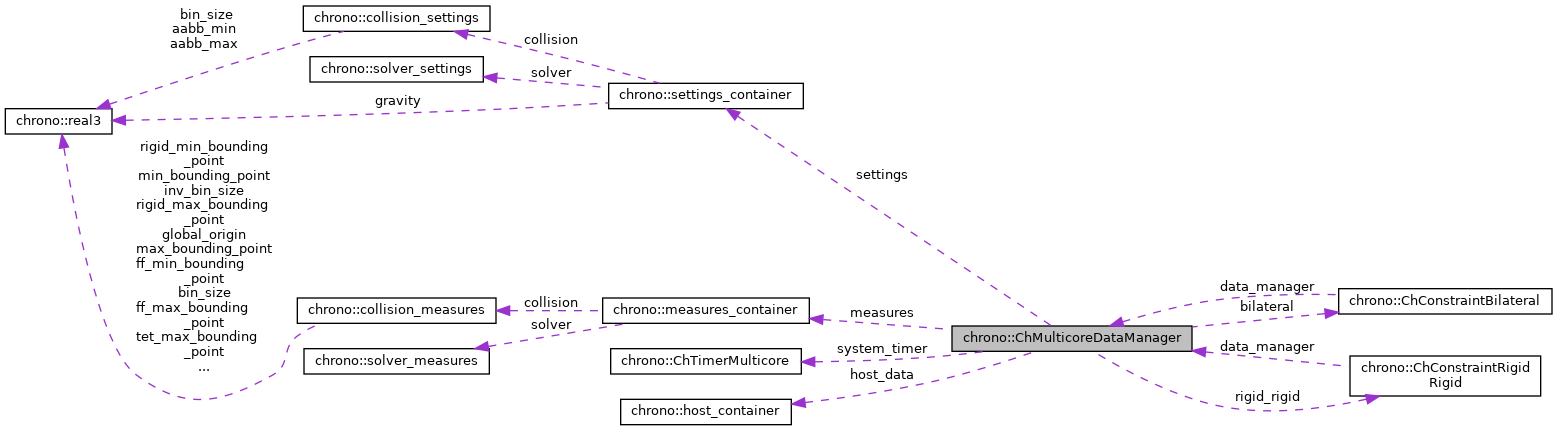
Global data manager for Chrono::Multicore.
#include <ChDataManager.h>
Collaboration diagram for chrono::ChMulticoreDataManager:
Public Member Functions | |
| int | OutputBlazeVector (DynamicVector< real > src, std::string filename) |
| Output a vector (one dimensional matrix) from blaze to a file. | |
| int | OutputBlazeMatrix (CompressedMatrix< real > src, std::string filename) |
| Output a sparse blaze matrix to a file. | |
| int | ExportCurrentSystem (std::string output_dir) |
| Utility debugging function that outputs all of the data associated for a system. | |
| void | PrintMatrix (CompressedMatrix< real > src) |
| Print a sparse blaze matrix. | |
Public Attributes | |
| host_container | host_data |
| Structure of data arrays (state, contact, etc) | |
| std::shared_ptr< ChSystemDescriptor > | system_descriptor |
| Used by the bilarerals for computing the Jacobian and other terms. | |
| std::shared_ptr< Ch3DOFContainer > | node_container |
| container of 3-DOF particles | |
| ChConstraintRigidRigid * | rigid_rigid |
| methods for unilateral constraints | |
| ChConstraintBilateral * | bilateral |
| methods for bilateral constraints | |
| std::shared_ptr< ChCollisionData > | cd_data |
| shared data for the Chrono collision system | |
| std::vector< std::shared_ptr< ChBody > > * | body_list |
| List of bodies. | |
| std::vector< std::shared_ptr< ChLinkBase > > * | link_list |
| List of bilaterals. | |
| std::vector< std::shared_ptr< ChPhysicsItem > > * | other_physics_list |
| List to other items. | |
| uint | num_rigid_bodies |
| The number of rigid bodies in a system. | |
| uint | num_particles |
| The number of 3-DOF particles in the system. | |
| uint | num_shafts |
| The number of shafts in a system. | |
| uint | num_motors |
| The number of motor links with 1 state variable. | |
| uint | num_linmotors |
| The number of linear speed motors. | |
| uint | num_rotmotors |
| The number of rotation speed motors. | |
| uint | num_dof |
| The number of degrees of freedom in the system. | |
| uint | num_unilaterals |
| The number of contact constraints. | |
| uint | num_bilaterals |
| The number of bilateral constraints. | |
| uint | num_constraints |
| Total number of constraints. | |
| uint | nnz_bilaterals |
| The number of non-zero entries in the bilateral Jacobian. | |
| bool | Fc_current |
| Flag indicating whether or not the contact forces are current (NSC only). | |
| ChTimerMulticore | system_timer |
| Container for all timers for the system. | |
| settings_container | settings |
| Container for all settings for the system, collision detection, and solver. | |
| measures_container | measures |
| Container for various statistics for collision detection and solver. | |
| std::unique_ptr< ChContactMaterialCompositionStrategy > | composition_strategy |
| Material composition strategy. | |
| std::shared_ptr< ChContactContainer::AddContactCallback > | add_contact_callback |
| User-provided callback for overriding composite material properties. | |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_multicore/ChDataManager.h
- /builds/uwsbel/chrono/src/chrono_multicore/ChDataManager.cpp
