Table of Contents
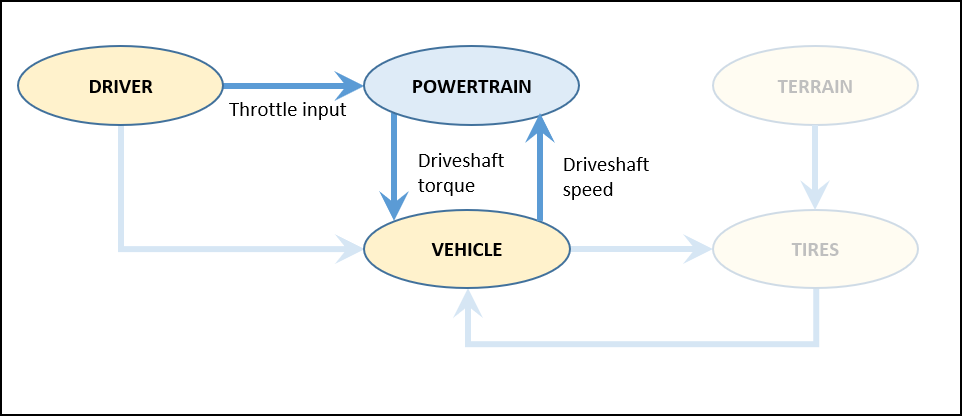
The powertrain system is connected to the driver system (receiving throttle inputs) and to the driveline sub-system of the vehicle system (receiving the driveshaft angular speed and sending the driveshaft torque).
Chrono::Vehicle is designed to permit linking to a third-party powertrain model. Interfacing to such an external powertrain model requires a thin interface class, derived from ChPowertrain.
Chrono::Vehicle provides several templates for the powertrain system, descibed below.
Shafts-based powertrain model
This powertrain model is based on various Chrono 1-D shaft elements (ChShaft) and specialized shaft connection elements. Such elements are used to model:
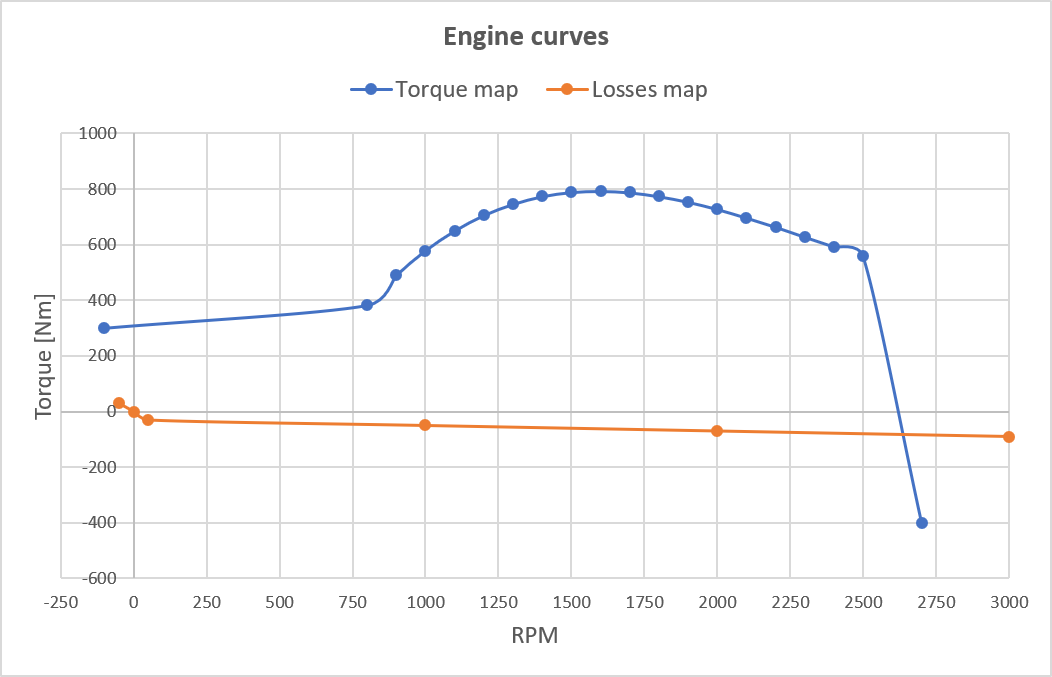
- the engine (ChShaftsThermalEngine), specified through speed-torque curves
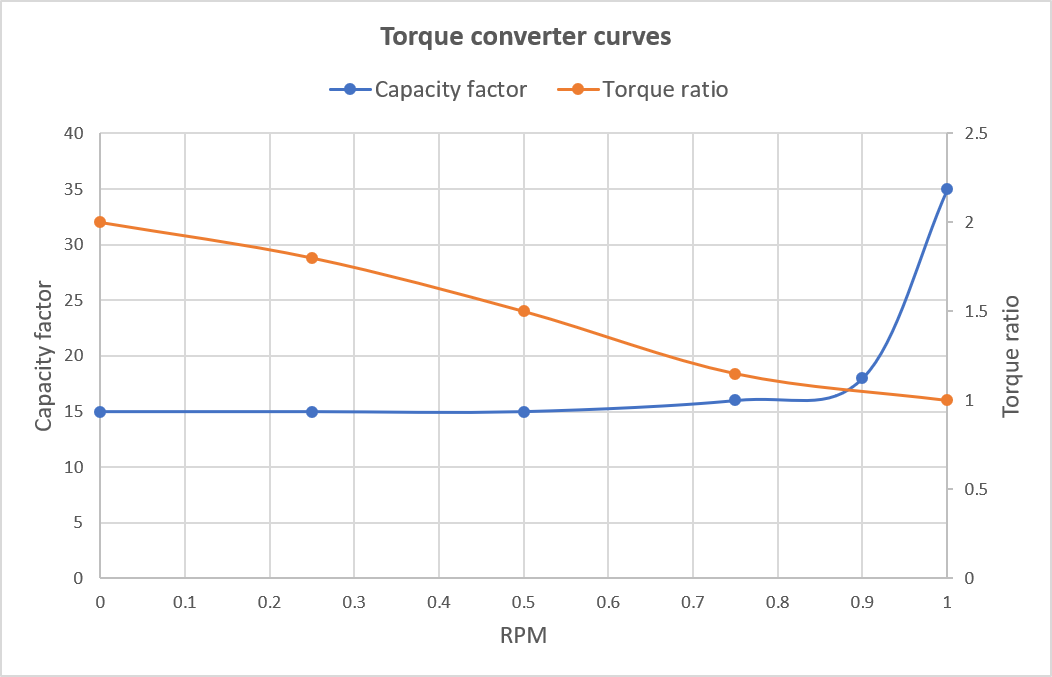
- the torque converter (ChShaftsTorqueConverter), specified through curves for the capacity factor as function of the speed ratio and the torque ratio as function of the speed ratio
- the gear box (manual or automatic, with an arbitrary number of forward gears and a reverse gear)
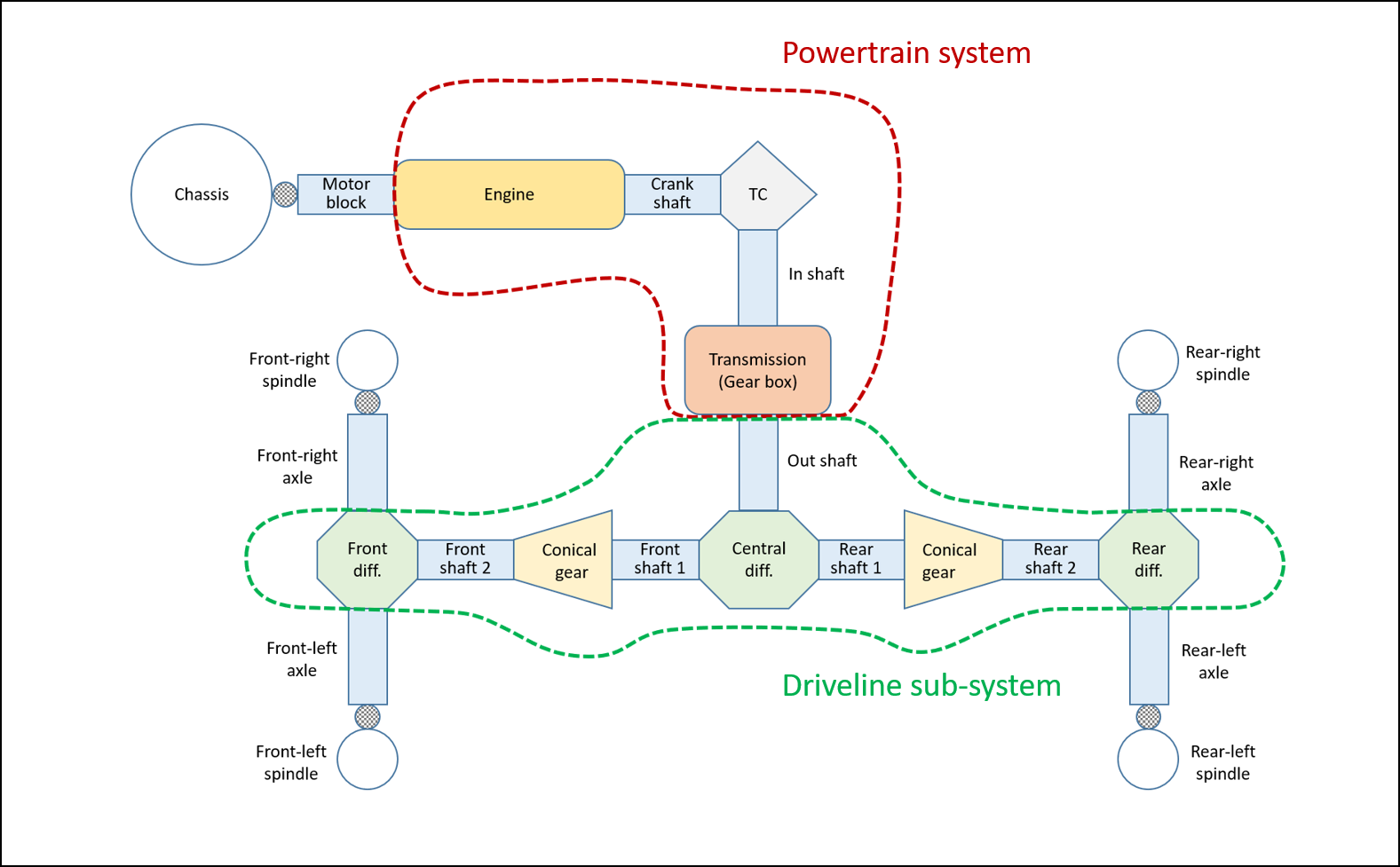
The motor block is attached to the chassis through a special Chrono constraint (ChShaftsBody) thus permitting simulating motor torque effects on the chassis.
See ChShaftsPowertrain and ShaftsPowertrain.
The image below shows the shafts-based powertrain model connected to a shafts-based wheeled vehicle model.
A sample JSON file with the specification of a shafts-based powertrain, illustrating the various template parameters, is provided below.
The curves encoded in the above JSON file are shown below.
Simple powertrain model
This model uses a trivial speed-torque dependency, has no torque converter and no transmission box.
See ChSimplePowertrain and SimplePowertrain.
A sample JSON file with the specification of a simple powertrain, illustrating the various template parameters, is provided below.
Engine map powertrain model
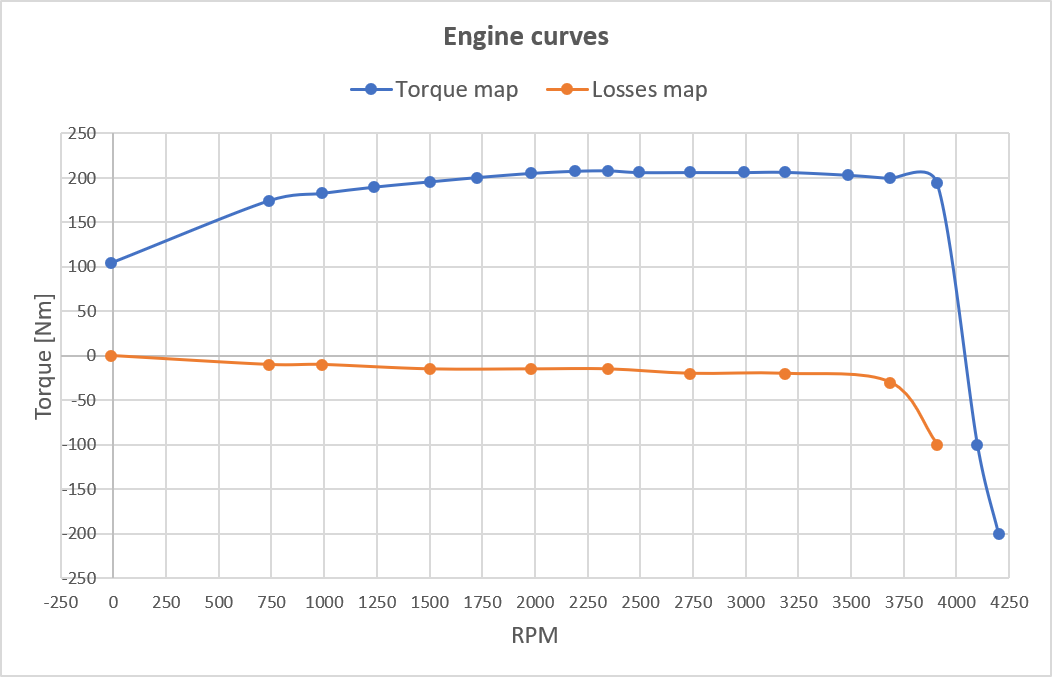
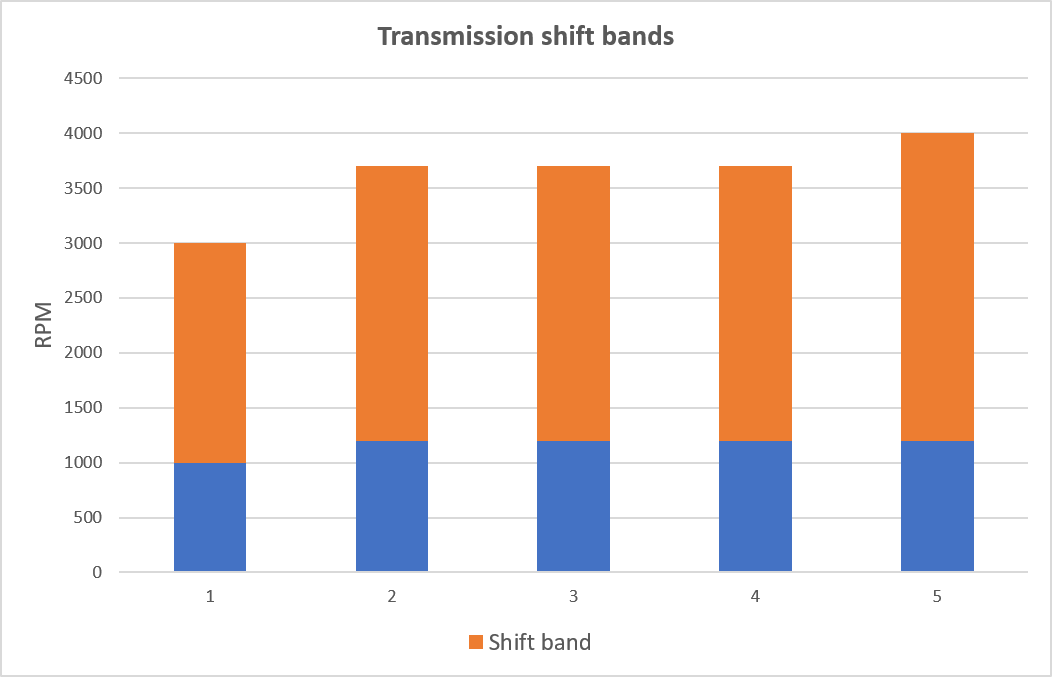
This template for a simple powertrain model is based on speed-torque engine maps. The model has no torque converter and can have either a manual or an automatic transmission. It accepts a single reverse gear and any number of forward gears. In automatic mode, gear shifting is done based on specified ideal shift points.
See ChSimpleMapPowertrain and SimpleMapPowertrain.
A sample JSON file with the specification of a map powertrain, illustrating the various template parameters, is provided below.
The curves encoded in the above JSON file are shown below.
Simple CVT-like powertrain subsystem
This simple powertrain model template uses a hyperbolical speed-torque curve like a CVT gearbox, has no torque converter and no transmission box.
See ChSimpleCVTPowertrain and SimpleCVTPowertrain.
A sample JSON file with the specification of a CVT-like powertrain, illustrating the various template parameters, is provided below.
