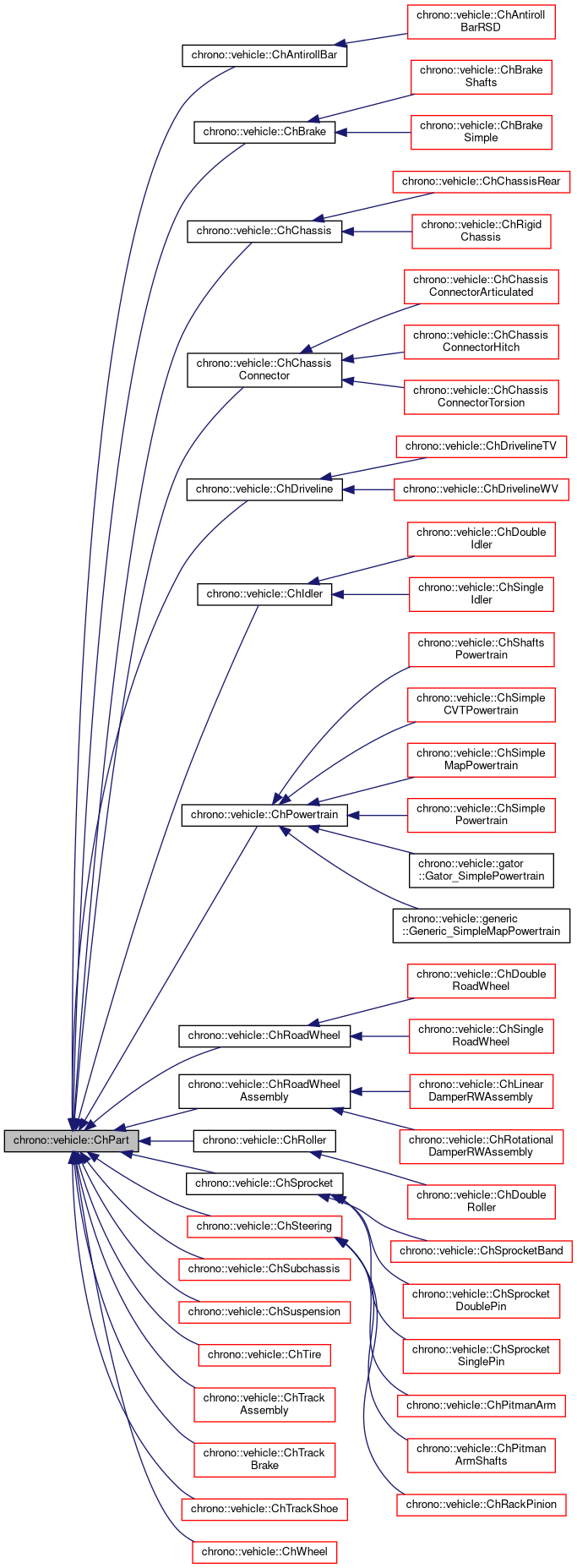
Description
Base class for a vehicle subsystem.
It manages the part's name, visualization assets, and output.
#include <ChPart.h>
Public Member Functions | |
| ChPart (const std::string &name) | |
| Construct a vehicle subsystem with the specified name. More... | |
| const std::string & | GetName () const |
| Get the name identifier for this subsystem. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this subsystem. | |
| virtual std::string | GetTemplateName () const =0 |
| Get the name of the vehicle subsystem template. | |
| void | SetVisualizationType (VisualizationType vis) |
| Set the visualization mode for this subsystem. | |
| virtual void | AddVisualizationAssets (VisualizationType vis) |
| Add visualization assets to this subsystem, for the specified visualization mode. | |
| virtual void | RemoveVisualizationAssets () |
| Remove all visualization assets from this subsystem. | |
| virtual void | SetOutput (bool state) |
| Enable/disable output for this subsystem. | |
| bool | OutputEnabled () const |
| Return the output state for this subsystem. | |
| virtual void | ExportComponentList (rapidjson::Document &jsonDocument) const |
| Export this subsystem's component list to the specified JSON object. More... | |
| virtual void | Output (ChVehicleOutput &database) const |
| Output data for this subsystem's component list to the specified database. | |
Static Public Member Functions | |
| static ChMatrix33 | TransformInertiaMatrix (const ChVector<> &moments, const ChVector<> &products, const ChMatrix33<> &vehicle_rot, const ChMatrix33<> &body_rot) |
| Utility function for transforming inertia tensors between centroidal frames. More... | |
Protected Member Functions | |
| virtual void | Create (const rapidjson::Document &d) |
| Create a vehicle subsystem from JSON data. More... | |
Static Protected Member Functions | |
| static void | ExportBodyList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChBody >> bodies) |
| Export the list of bodies to the specified JSON document. | |
| static void | ExportShaftList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaft >> shafts) |
| Export the list of shafts to the specified JSON document. | |
| static void | ExportJointList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLink >> joints) |
| Export the list of joints to the specified JSON document. | |
| static void | ExportCouplesList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftsCouple >> couples) |
| Export the list of shaft couples to the specified JSON document. | |
| static void | ExportMarkerList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChMarker >> markers) |
| Export the list of markers to the specified JSON document. | |
| static void | ExportLinSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkTSDA >> springs) |
| Export the list of translational springs to the specified JSON document. | |
| static void | ExportRotSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkRotSpringCB >> springs) |
| Export the list of rotational springs to the specified JSON document. | |
| static void | ExportBodyLoadList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLoadBodyBody >> loads) |
| Export the list of body-body loads to the specified JSON document. | |
Protected Attributes | |
| std::string | m_name |
| subsystem name | |
| bool | m_output |
| specifies whether or not output is generated for this subsystem | |
Constructor & Destructor Documentation
◆ ChPart()
| chrono::vehicle::ChPart::ChPart | ( | const std::string & | name | ) |
Construct a vehicle subsystem with the specified name.
- Parameters
-
[in] name name of the subsystem
Member Function Documentation
◆ Create()
|
protectedvirtual |
Create a vehicle subsystem from JSON data.
A derived class must override this function and first invoke the base class implementation.
◆ ExportComponentList()
|
virtual |
Export this subsystem's component list to the specified JSON object.
Derived classes should override this function and first invoke the base class implementation, followed by calls to the various static Export***List functions, as appropriate.
Reimplemented in chrono::vehicle::ChTrackAssembly, chrono::vehicle::ChSprocket, chrono::vehicle::ChRigidChassisRear, chrono::vehicle::ChIdler, chrono::vehicle::ChLinearDamperRWAssembly, chrono::vehicle::ChRackPinion, chrono::vehicle::ChRotationalDamperRWAssembly, chrono::vehicle::ChTrackShoeDoublePin, chrono::vehicle::ChRoadWheelAssembly, chrono::vehicle::ChRoadWheel, chrono::vehicle::ChRigidChassis, chrono::vehicle::ChRoller, and chrono::vehicle::ChTrackShoeSinglePin.
◆ TransformInertiaMatrix()
|
static |
Utility function for transforming inertia tensors between centroidal frames.
It converts an inertia matrix specified in a centroidal frame aligned with the vehicle reference frame to an inertia matrix expressed in a centroidal body reference frame.
- Parameters
-
moments moments of inertia in vehicle-aligned centroidal frame products products of inertia in vehicle-aligned centroidal frame vehicle_rot vehicle absolute orientation matrix body_rot body absolute orientation matrix
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/ChPart.h
- /builds/uwsbel/chrono/src/chrono_vehicle/ChPart.cpp
